1.本实用新型涉及无人机技术领域,具体为多旋翼无人机。
背景技术:
2.无人机是指具有动力装置,不载操作人员的飞机,它是利用空气动力来克服自身的重量,可自主或遥控飞行,也可一次使用或多次回收使用,在科研领域、民用领域或军事领域均有广泛的应用,可以满足航拍、监控等要求。
3.在现有技术实际的使用时,因为勘测地点的不确定,在进行实际勘测时可能发生因无人机支臂过长,机臂全面展开的话整体无人机的直径过大而导致无法顺利的进行勘测,或者勘测时容易发生无人机的碰撞,造成损坏,具备改进空间。
技术实现要素:
4.针对上述问题,本实用新型的目的在于提供多旋翼无人机,通过设计调节旋钮旋转进行控制的机臂复位机构,进而可对转动叶片水平方向和无人机壳体之间的距离进行自由的控制,使得在对空间较小的区域进行勘探时壳有效的避免转动叶片与障碍物接触,造成损坏,同时在进行存放时,可有效的减少装置的存放空间,更加的实用。
5.为实现上述目的,本实用新型提供如下技术方案:多旋翼无人机,包括无人机壳体、机臂、与机臂连接的伺服电机以及与伺服电机输出端连接的转动叶片,所述无人机壳体的内部设置有用于将无人机壳体内部分隔为上部空间和下部空间的隔板,所述上部空间中设置有稳定杆和机臂调节组件,所述机臂的一端贯穿所述稳定杆且与稳定杆滑动连接;
6.所述机臂调节组件包括有机臂复位机构和机臂调节机构,所述机臂调节机构设置在机臂调节组件内部的中心位置处,所述机臂复位机构设置在机臂调节机构的外侧,所述机臂的一端穿过机臂复位机构并与机臂调节机构接触。
7.进一步改进在于:所述机臂调节机构包括有固定棘轮、调节旋钮、外环和调节块,所述固定棘轮固定安装在机臂调节机构的内部,所述调节旋钮与固定棘轮转动连接,所述外环转动安装在固定棘轮的外侧且与调节旋钮固定连接,所述外环的外侧设置有若干组调节块,所述外环的内侧转动安装有限位摇臂,所述限位摇臂的一端通过拉簧与外环的内壁连接,限位摇臂的侧部设置有限位挡块。
8.进一步改进在于:所述机臂复位机构包括有定位环以设置在定位环上的安装套,所述机臂的一端穿过所述安装套并在安装套的内部设置有弹簧,所述弹簧设在机臂的外侧且所述弹簧的一端连接在所述安装套的内壁上。
9.进一步改进在于:所述调节旋钮的结构形状为“t”形,且所述调节旋钮的顶部穿过所述无人机壳体并延伸到所述无人机壳体的外部,且调节旋钮与无人机壳体螺纹旋转连接。
10.进一步改进在于:所述无人机壳体下部空间设置有滚动机构,所述滚动机构包括有电动伸缩杆、横杆、导杆和导套,所述电动伸缩杆设置在隔板的底部,所述横杆上通过导
套与导杆滑动连接,所述电动伸缩杆输出端与横杆连接,所述横杆两侧的底部设置有滚轮组。
11.进一步改进在于:所述无人机壳体的上方设置有透明窗,所述透明窗设置有四组,四组所述透明窗的位置与机臂一端的垂直位置相互对应。
12.进一步改进在于:所述无人机壳体的正前方设置有fpv航拍摄像头。
13.与现有技术相比,本实用新型的有益效果是:通过设计调节旋钮旋转进行控制的机臂复位机构,使得调节旋钮进行旋转时同步带动机臂复位机构内部固定棘轮、调节旋钮、调节块、限位摇臂和机臂进行运动,进而可对转动叶片水平方向和无人机壳体之间的距离进行自由的控制,使得在对空间较小的区域进行勘探时壳有效的避免转动叶片与障碍物接触,造成损坏,同时在进行存放时,可有效的减少装置的存放空间,更加的实用。
附图说明
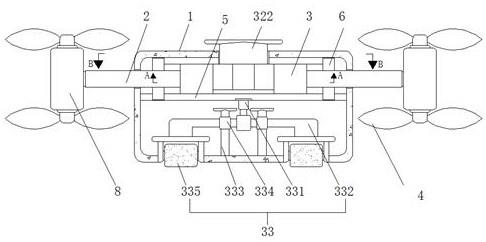
14.图1为本实用新型正面剖视结构示意图;
15.图2为本实用新型图1中a
‑
a俯视剖视结构示意图;
16.图3为本实用新型图1中b
‑
b仰视剖视结构示意图;
17.图4为本实用新型图2中c点放大结构示意图。
18.图中:1、无人机壳体;2、机臂;3、机臂调节组件;31、机臂复位机构;311、定位环;312、安装套;313、弹簧;32、机臂调节机构;321、固定棘轮;322、调节旋钮;323、外环;324、调节块;325、限位摇臂;326、限位挡块;33、滚动机构;331、动伸缩杆;332、横杆;333、导杆;334、导套;335、滚轮组;4、转动叶片;5、隔板;6、稳定杆;7、透明窗;8、伺服电机;9、fpv航拍摄像头。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例一
21.请参阅图1
‑
4,本实用新型提供一种技术方案:多旋翼无人机,包括无人机壳体1、机臂2、与机臂2连接的伺服电机8以及与伺服电机8输出端连接的转动叶片4,所述伺服电机8的型号可为ys9002,所述无人机壳体1的内部设置有用于将无人机壳体1内部分隔为上部空间和下部空间的隔板5,上部空间与下部空间通过隔板5相互隔开,通过两个独立的空间可以起到配置不同组件,便于各个空间中零部件、组件的检修和维护,所述上部空间中设置有稳定杆6和机臂调节组件3,所述机臂2的一端贯穿所述稳定杆6且与稳定杆6滑动连接,稳定杆6的设置可以给机臂2提供伸缩的更好的稳定性,可以保证机臂2在水平位置上伸缩的水平度不会受到影响,大大的提高了机臂2伸缩的精度;
22.所述机臂调节组件3包括有机臂复位机构31和机臂调节机构32,机臂调节机构32的设置用于调节各个机臂2的长度,可以根据飞行的场景环境,来提前对无人机的机臂2长度进行调节,以使其适应不同环境下的飞行勘测作业,机臂复位机构31是作为一个恢复原
始状态的一个机构,与机臂调节机构32是相适配的,所述机臂调节机构32设置在机臂调节组件3内部的中心位置处,所述机臂复位机构31设置在机臂调节机构32的外侧,所述机臂2的一端穿过机臂复位机构31并与机臂调节机构32接触。
23.所述机臂调节机构32包括有固定棘轮321、调节旋钮322、外环323和调节块324,所述固定棘轮321固定安装在机臂调节机构32的内部,所述调节旋钮322与固定棘轮321转动连接,所述外环323转动安装在固定棘轮321的外侧且与调节旋钮322固定连接,所述外环323的外侧设置有若干组调节块324,所述外环323的内侧转动安装有限位摇臂325,所述限位摇臂325的一端通过拉簧与外环323的内壁连接,限位摇臂325的侧部设置有限位挡块326,在无人机飞行作业前,通过观察飞行作业环境,如需要将无人机的整体机翼进行增长,则先转动调节旋钮322,然后带动外环323顺时针转动,这时调节块324会抵着机臂2使其往外伸出,从而多个机臂2向外伸长一段距离。
24.所述调节块324设置有四组,四组所述调节块324以外环323的圆心为旋转轴等角度分布,相邻所述调节块324之间的夹角为90
°
,所述调节块324呈三角形机构,所述机臂2的一端与调节块324的长边接触,因为调节块324是三角形的形状且是安装在外环323的外侧的,所以调节块324靠近的顶点位置则是机臂2伸长的最长距离,调节块324的底边位置侧是机臂2伸长的最短距离,那么通过改变机臂2的一端在调节块324的长边上移动的位置从而调节机臂2伸长的距离。
25.所述机臂复位机构31包括有定位环311以设置在定位环311上的安装套312,所述机臂2的一端穿过所述安装套312并在安装套312的内部设置有弹簧313,所述弹簧313设在机臂2的外侧且所述弹簧313的一端连接在所述安装套312的内壁上,通过观察飞行场景和环境,如需要减小无人机机翼的宽度,那么通过手动向左扳动限位摇臂325,使固定棘轮321的锯齿的右侧解除对限位摇臂325的限制,转动调节旋钮322带动外环323逆时针转动,从而因为弹簧313的设置带动机臂2向内移动,进而进行机臂2的收缩,飞行前进行手动的环境自适应调节。
26.所述调节旋钮322的结构形状为“t”形,且所述调节旋钮322的顶部穿过所述无人机壳体1并延伸到所述无人机壳体1的外部,且调节旋钮322与无人机壳体1螺纹旋转连接,调节旋钮322的顶部在无人机壳体1的外部,方便进行调节,并且调节旋钮322与无人机壳体1的螺纹连接方式可以防止机臂2因为弹簧313的弹性恢复力导致外环323不在人为调节的情况下反向复位
27.实施例二
28.请参阅图1
‑
4,本实用新型提供一种技术方案:多旋翼无人机,包括无人机壳体1、机臂2、与机臂2连接的伺服电机8以及与伺服电机8输出端连接的转动叶片4,所述无人机壳体1的内部设置有用于将无人机壳体1内部分隔为上部空间和下部空间的隔板5,所述上部空间中设置有稳定杆6和机臂调节组件3,所述机臂2的一端贯穿所述稳定杆6且与稳定杆6滑动连接;
29.所述机臂调节组件3包括有机臂复位机构31和机臂调节机构32,所述机臂调节机构32设置在机臂调节组件3内部的中心位置处,所述机臂复位机构31设置在机臂调节机构32的外侧,所述机臂2的一端穿过机臂复位机构31并与机臂调节机构32接触。
30.所述机臂调节机构32包括有固定棘轮321、调节旋钮322、外环323和调节块324,所
述固定棘轮321固定安装在机臂调节机构32的内部,所述调节旋钮322与固定棘轮321转动连接,所述外环323转动安装在固定棘轮321的外侧且与调节旋钮322固定连接,所述外环323的外侧设置有若干组调节块324,所述外环323的内侧转动安装有限位摇臂325,所述限位摇臂325的一端通过拉簧与外环323的内壁连接,限位摇臂325的侧部设置有限位挡块326。
31.所述调节块324设置有四组,四组所述调节块324以外环323的圆心为旋转轴等角度分布,相邻所述调节块324之间的夹角为90
°
,所述调节块324呈三角形机构,所述机臂2的一端与调节块324的长边接触。
32.所述机臂复位机构31包括有定位环311以设置在定位环311上的安装套312,所述机臂2的一端穿过所述安装套312并在安装套312的内部设置有弹簧313,所述弹簧313设在机臂2的外侧且所述弹簧313的一端连接在所述安装套312的内壁上。
33.所述调节旋钮322的结构形状为“t”形,且所述调节旋钮322的顶部穿过所述无人机壳体1并延伸到所述无人机壳体1的外部,且调节旋钮322与无人机壳体1螺纹旋转连接。
34.所述无人机壳体1下部空间设置有滚动机构33,所述滚动机构33包括有电动伸缩杆331、横杆332、导杆333和导套334,所述电动伸缩杆331设置在隔板5的底部,所述横杆332上通过导套334与导杆333滑动连接,所述电动伸缩杆331输出端与横杆332连接,所述横杆332两侧的底部设置有滚轮组335,通过滚动机构33,可对滚轮组335进行缓冲处理。
35.所述无人机壳体1的上方设置有透明窗7,所述透明窗7设置有四组,四组所述透明窗7的位置与机臂2一端的垂直位置相互对应,透明窗7的设置位置可以很直接的观察到外环323上的调节块324与机臂2相接触的直接位置情况。
36.所述无人机壳体1的正前方设置有fpv航拍摄像头9,可对勘测地点进行拍摄。
37.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。