1.本发明涉及飞行器领域,特别是涉及一种基于多点激光校准的自动降落四轴飞行器装置。
背景技术:
2.无人驾驶飞机简称无人机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为无人固定翼飞机、无人垂直起降飞机 、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等,目前越来越多的民用飞行器投入市场,如果飞行器爱好者们均采购飞行器进行娱乐活动,但是飞行器存在较高的操控难度,或是在非熟练人员的操控下容易发生失控坠毁等问题,而飞行器的起飞降落难度也较大,针对该问题,需要设计飞行器的自动降落功能,来为费者们提供更舒适的体验。
技术实现要素:
3.本发明主要解决的技术问题是提供一种基于多点激光校准的自动降落四轴飞行器装置,能够根据激光校准技术实现飞行器的自动降落功能。
4.为解决上述技术问题,本发明采用的一个技术方案是:提供一种基于多点激光校准的自动降落四轴飞行器装置,包括飞行器本体和升降平台,所述飞行器本体包括中央机体和机翼架杆,所述机翼架杆连接在所述中央机体的四周,所述机翼架杆的末端连接有步进电机,所述步进电机的输出转轴水平横向连接一机箱壳体,所述机箱壳体的内部安装有直流电机,所述直流电机的上端连接螺旋桨,所述中央机体的下端面的四个边角处分别嵌入连接激光接收器,所述中央机体的内部安装有光电转换器、信号放大电路、可编程逻辑控制器和电机编码器,所述激光接收器与所述光电转换器连接,所述光电转换器输出端连接所述信号放大电路的输入端,所述信号放大电路的输出端连接所述可编程逻辑控制器,所述可编程逻辑控制器与所述电机编码器连接,所述电机编码器与所述步进电机连接,所述升降平台上端面为正方形平面,所述升降平台上端面的四个边角处嵌入设有激光发射器。
5.在本发明一个较佳实施例中,所述激光发射器为顶角形成的正方形与所述激光接收器为顶角形成的正方形相同。
6.在本发明一个较佳实施例中,所述中央机体的下端面连接一对机架,所述升降平台的上端面设有机架固定夹。
7.在本发明一个较佳实施例中,其特征在于,所述步进电机的单向旋转角度不超过45
°
。
8.本发明的有益效果是:本发明设计了一款具有自动降落功能的飞行器,其自动降落功能的主要实现方法是利用激光校准技术,将飞行器与配套的降落平台所处的相对位置固定,然后再利用自动控制技术缓慢的减少飞行器的电机输出功率,使其缓慢降落,最后着陆在平台上,整个过程靠智能控制系统控制实现,无需人工操作。
附图说明
9.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
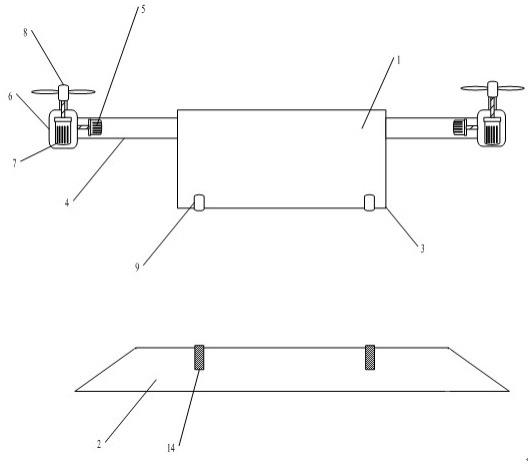
10.图1是本发明基于多点激光校准的自动降落四轴飞行器装置一较佳实施例的结构示意图;
11.图2是本发明基于多点激光校准的自动降落四轴飞行器装置一较佳实施例的电路结构示意图;
12.附图中各部件的标记如下:1、飞行器本体;2、升降平台;3、中央机体;4、机翼架杆;5、步进电机;6、机箱壳体;7、直流电机;8、螺旋桨;9、激光接收器;10、光电转换器;11、信号放大电路;12、可编程逻辑控制器;13、电机编码器;14、激光发射器。
具体实施方式
13.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
14.请参阅图1和图2,本发明实施例包括:
15.一种基于多点激光校准的自动降落四轴飞行器装置,包括飞行器本体1和升降平台2,所述飞行器本体1包括中央机体3和机翼架杆4,所述机翼架杆4连接在所述中央机体的四周,所述机翼架杆4的末端连接有步进电机5,所述步进电机5的输出转轴水平横向连接一机箱壳体6,所述机箱壳体6的内部安装有直流电机7,所述直流电机7的上端连接螺旋桨8,所述中央机体3的下端面的四个边角处分别嵌入连接激光接收器9,所述中央机体3的内部安装有光电转换器10、信号放大电路11、可编程逻辑控制器12和电机编码器13,所述激光接收器9与所述光电转换器10连接,所述光电转换器10输出端连接所述信号放大电路11的输入端,所述信号放大电路11的输出端连接所述可编程逻辑控制器12,所述可编程逻辑控制器12与所述电机编码器13连接,所述电机编码器13与所述步进电机5连接,所述升降平台2上端面为正方形平面,所述升降平台2上端面的四个边角处嵌入设有激光发射器14。
16.另外,所述激光发射器14为顶角形成的正方形与所述激光接收器9为顶角形成的正方形相同。
17.另外,所述中央机体3的下端面连接一对机架,所述升降平台2的上端面设有机架固定夹。
18.另外,所述步进电机5的单向旋转角度不超过45
°
。
19.本发明的工作原理为飞行器本体1包括中央机体3和机翼架杆4,机翼架杆4连接在中央机体的四周,机翼架杆4的末端连接有步进电机5,步进电机5的单向旋转角度不超过45
°
,步进电机5的输出转轴水平横向连接一机箱壳体6,机箱壳体6的内部安装有直流电机7,直流电机7的上端连接螺旋桨8,直流电机7带动上方的螺旋桨8产生垂直的上升力,而步进电机5从一侧调节机箱壳体6的角度从而调节螺旋桨8的朝向,以此来控制飞行器的平移
飞行。
20.中央机体3的下端面的四个边角处分别嵌入连接激光接收器9,中央机体3的内部安装有光电转换器10、信号放大电路11、可编程逻辑控制器12和电机编码器13,激光接收器9与光电转换器10连接、光电转换器10输出端连接信号放大电路11的输入端,信号放大电路11的输出端连接可编程逻辑控制器12,可编程逻辑控制器12与电机编码器13连接,电机编码器13与步进电机5连接,升降平台2上端面为正方形平面,升降平台2上端面的四个边角处嵌入设有激光发射器14。
21.激光发射器14为顶角形成的正方形与激光接收器9为顶角形成的正方形相同,飞行器飞临升降平台2的上方的同时,升降平台2上所发射的激光被飞行器下方的激光接收器所采集到,系统控制飞行器处于平台的相对位置缓慢下降,实现自动降落功能,中央机体3的下端面连接一对机架,升降平台2的上端面设有机架固定夹,
22.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种基于多点激光校准的自动降落四轴飞行器装置,包括飞行器本体和升降平台,其特征在于,所述飞行器本体包括中央机体和机翼架杆,所述机翼架杆连接在所述中央机体的四周,所述机翼架杆的末端连接有步进电机,所述步进电机的输出转轴水平横向连接一机箱壳体,所述机箱壳体的内部安装有直流电机,所述直流电机的上端连接螺旋桨,所述中央机体的下端面的四个边角处分别嵌入连接激光接收器,所述中央机体的内部安装有光电转换器、信号放大电路、可编程逻辑控制器和电机编码器,所述激光接收器与所述光电转换器连接,所述光电转换器输出端连接所述信号放大电路的输入端,所述信号放大电路的输出端连接所述可编程逻辑控制器,所述可编程逻辑控制器与所述电机编码器连接,所述电机编码器与所述步进电机连接,所述升降平台上端面为正方形平面,所述升降平台上端面的四个边角处嵌入设有激光发射器。2.根据权利要求1所述的基于多点激光校准的自动降落四轴飞行器装置,其特征在于,所述激光发射器为顶角形成的正方形与所述激光接收器为顶角形成的正方形相同。3.根据权利要求1所述的基于多点激光校准的自动降落四轴飞行器装置,其特征在于,所述中央机体的下端面连接一对机架,所述升降平台的上端面设有机架固定夹。4.根据权利要求1所述的基于多点激光校准的自动降落四轴飞行器装置,其特征在于,所述步进电机的单向旋转角度不超过45
°
。
技术总结
本发明公开了一种基于多点激光校准的自动降落四轴飞行器装置,包括飞行器本体和升降平台,所述飞行器本体包括中央机体和机翼架杆,所述机翼架杆连接在所述中央机体的四周,所述机翼架杆的末端连接有步进电机,所述步进电机的输出转轴水平横向连接一机箱壳体,所述机箱壳体的内部安装有直流电机,所述直流电机的上端连接螺旋桨,所述中央机体的下端面的四个边角处分别嵌入连接激光接收器,所述中央机体的内部安装有光电转换器、信号放大电路、可编程逻辑控制器和电机编码器,所述激光接收器与所述光电转换器连接,所述光电转换器连接所述信号放大电路。通过上述方式,本发明能够根据激光校准技术实现飞行器的自动降落功能。据激光校准技术实现飞行器的自动降落功能。据激光校准技术实现飞行器的自动降落功能。
技术研发人员:朱赛花
受保护的技术使用者:远鉴商业管理集团(成都)有限公司
技术研发日:2021.01.31
技术公布日:2021/12/16