1.本发明属于航空技术领域,涉及一种侧窗滑流式涵道无人机。
背景技术:
2.随着电力隧道、城市管廊等各种地下设施的快速发展,在地下密闭狭小空间进行无人机巡检的需求日益增加。涵道无人机具有体积小、载重大、安全可靠等特征,非常适合上述任务场景的应用。但现有涵道无人机多采用在螺旋桨下方安装可活动舵面进行位姿控制,通过控制姿态来间接控制位置,使得位置控制回路响应缓慢,难以满足无人机在密闭狭小空间中高精度位置控制的应用要求。
技术实现要素:
3.本发明所要解决的技术问题在于:克服上述现有技术之不足,提供一种侧窗滑流式涵道无人机,增加直接的水平运动控制通道,提高无人机位置控制精度。
4.本发明的技术解决方案:一种侧窗滑流式涵道无人机,其特点在于:采用直接控制无人机水平运动的结构,
5.所述结构包括侧窗滑流调节器、多边形或圆形涵道、动力装置和无人机控制装置;
6.所述多边形或圆形涵道,隔离涵道内、外气流,用来产生侧窗滑流调节器提供所需要的涵道内外气压差;
7.所述动力装置,为无人机提供升力,并为侧窗滑流调节器提供所需要的涵道内外气压差,为单螺旋桨动力系统或共轴双桨动力系统;动力装置与多边形或圆形涵道固连;
8.所述无人机控制装置用来实现对侧窗滑流调节器开度的调节,与动力装置固连;
9.所述侧窗滑流调节器通过引导无人机涵道外部气流流向涵道内部,从而产生向上的升力和水平方向的推力,实现位置控制;侧窗滑流调节器纵向位置位于螺旋桨的上方或螺旋桨的下方或共轴双桨动力系统上、下螺旋桨之间,并与所述多边形或圆形涵道固连;
10.在侧窗滑流式涵道无人机飞行时,由无人机控制装置对侧窗滑流调节器开度进行调节,根据需求产生水平方向的推力,从而精准控制无人机的水平速度和位置。
11.所述侧窗滑流调节器包括引流舵、阻流板、拉杆和舵机;所述引流舵与无人机涵道铰接;所述阻流板位于引流舵的两端,固连于涵道外壁;所述拉杆分别与引流舵和舵机连接,所述舵机安装于涵道外壁。阻流板引导高速气流沿导流舵与涵道产生的开口流入,有利于产生方向稳定的升力与水平方向的推力。
12.所述多边形或圆形涵道的顶视外形为正四边形或正六边形或正八边形或圆形。上述构型为对称结构,利于侧窗滑流调节器的安装,且有助于简化控制逻辑。
13.所述侧窗滑流调节器数量为偶数,且对称安装在涵道侧壁上。安装在不同位置的侧窗滑流调节器会产生不同方向的水平推力,为实现无人机的全向控制,简化控制逻辑,所述侧窗滑流调节器的数量为偶数,且对称安装在涵道侧壁上。
14.所述引流舵具有翼型结构,下部具有滚轴。翼型结构相比平板结构能产生更大升
力,利于控制。
15.本发明与现有技术相比具有如下优点:
16.(1)在现有涵道无人机控制技术中,没有直接控制水平位置的机构,而是通过控制姿态间接地控制位置,使得位置控制回路响应缓慢,难以满足涵道无人机在密闭狭小空间中高精度位置控制的应用要求。本发明的侧窗滑流调节器可引导高速气流流经引流舵的翼型表面产生向上的升力和水平方向的推力,解决了常规涵道无人机没有水平运动控制通道的难题,可实现涵道无人机高精度位置控制。
17.(2)同时本发明简单轻巧、部件少、装配方便、生产成本低。
附图说明
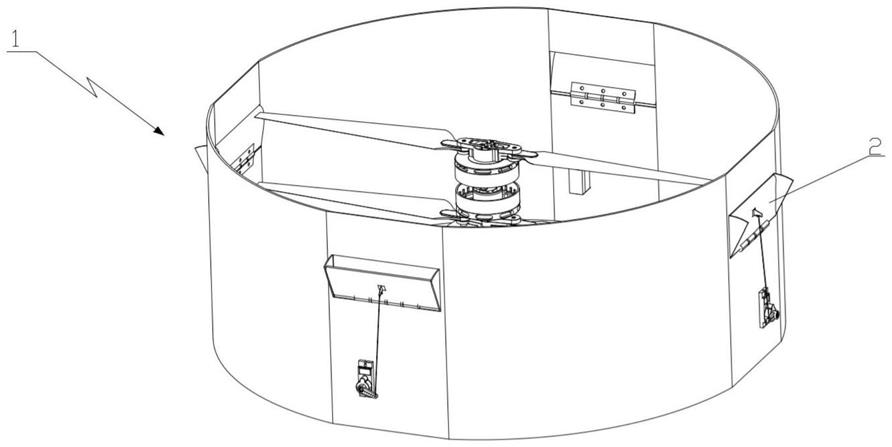
18.图1是本发明采用圆形侧窗滑流式涵道的无人机实施例示意图;
19.图2是本发明采用正八边形侧窗滑流式涵道的无人机实施例示意图;
20.图3是本发明中侧窗滑流调节器的结构图;
21.图4是本发明中引流舵结构剖面图。
具体实施方式
22.下面结合附图及实施例对本发明进行详细说明。
23.如图1、图2所示,根据本发明提供的实施例,侧窗滑流式涵道无人机包括多边形或圆形涵道1、侧窗滑流调节器2、动力装置和无人机控制装置。动力装置和无人机控制装置与多边形或圆形涵道1固连。在无人机飞行时,动力装置为飞机提供升力。在位置控制时,由于多个侧窗滑流调节器2之间产生的水平推力方向互不相同,所以无人机控制装置可以根据需要调节相应侧窗滑流调节器2的开度,使无人机产生在期望方向上的速度,从而完成高精度的位置控制。
24.所述侧窗滑流调节器2数量为偶数,且对称安装在多边形或圆形涵道1侧壁上。所述侧窗滑流调节器2安装方便,固定牢靠。
25.多边形或圆形涵道1与动力装置固连,且固定涵道顶视外形是正四边形或正六边形或正八边形或圆形。
26.侧窗滑流调节器2纵向位置位于螺旋桨的上方或螺旋桨的下方(图1)或共轴双桨动力系统上、下螺旋桨之间(图2)。
27.如图1至图3所示,侧窗滑流调节器2由阻流板3、引流舵4、拉杆5和舵机6组成。引流舵4与固定涵道1铰接,拉杆5与引流舵4以及舵机6连接,阻流板3与舵机6安装在所述固定涵道上。所述侧窗滑流调节器2结构简单、部件少、装配方便、生产成本低。
28.如图4所示,在无人机控制装置调节侧窗滑流调节器2的开度时:无人机控制装置向舵机6传递偏转一定角度的控制信号,舵机6的摇臂产生偏转角,随即带动拉杆5向下运动,拉杆5与引流舵4上舵角连接,带动引流舵4产生偏转,完成侧窗滑流调节器2开度的控制。引流舵4偏转的角度不同,产生的水平推力大小也不同(参见图4),无人机控制装置可根据实际需要改变开度,完成高精度位置控制。
29.如图3与图4所示,引流舵4具有翼型结构,下部具有滚轴,可与固定涵道1铰接。通过无人机控制装置控制舵机6带动所述引流舵4偏转,改变侧窗滑流调节器开度,动力装置
引导气流流经引流舵4翼面产生内外气压差,进而产生矢量推力,实现高精度位置控制。
30.如图3所示,阻流板3为扇形结构,位于引流舵4的两端,固连于固定涵道1外壁。阻流板3作用在于阻挡气流从所述引流舵4侧面进入涵道内部,可提高引流舵4控制效率。
31.如图3与图4所示,侧窗滑流调节器2与动力装置引导涵道外部气体流入涵道中,还可以起到气流增压效果,提高双桨系统的能量转化效率,节省电池电量,延长续航时间。
32.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行变化,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种侧窗滑流式涵道无人机,其特征在于:采用直接控制无人机水平运动的结构,所述结构包括侧窗滑流调节器、多边形或圆形涵道、动力装置和无人机控制装置;所述多边形或圆形涵道,隔离涵道内、外气流,用来产生侧窗滑流调节器提供所需要的涵道内外气压差;所述动力装置,为无人机提供升力,并为侧窗滑流调节器提供所需要的涵道内外气压差,为单螺旋桨动力系统或共轴双桨动力系统;动力装置与多边形或圆形涵道固连;所述无人机控制装置用来实现对侧窗滑流调节器开度的调节,与动力装置固连;所述侧窗滑流调节器通过引导无人机涵道外部气流流向涵道内侧,从而产生向上的升力和水平方向的推力,实现水平运动控制;侧窗滑流调节器纵向位置位于螺旋桨的上方或螺旋桨的下方或共轴双桨动力系统上、下螺旋桨之间,并与所述多边形或圆形涵道固连;在侧窗滑流式涵道无人机飞行时,由无人机控制装置对侧窗滑流调节器开度进行调节,根据需求产生水平方向的推力,从而精准控制无人机的水平速度和位置。2.根据权利要求1所述的侧窗滑流式涵道无人机,其特征在于:所述侧窗滑流调节器包括引流舵、阻流板、拉杆和舵机;所述引流舵与无人机涵道铰接;所述阻流板位于引流舵的两端,固连于涵道外壁;所述拉杆分别与引流舵和舵机连接,所述舵机安装于涵道外壁。3.根据权利要求1所述的侧窗滑流式涵道无人机,其特征在于:所述多边形或圆形涵道的顶视外形为正四边形或正六边形或正八边形或圆形。4.根据权利要求1所述的侧窗滑流式涵道无人机,其特征在于:所述侧窗滑流调节器数量为偶数,且对称安装在涵道侧壁上。5.根据权利要求2所述的侧窗滑流式涵道无人机,其特征在于:所述引流舵具有翼型结构,下部具有滚轴。
技术总结
本发明涉及一种侧窗滑流式涵道无人机,由侧窗滑流调节器、多边形或圆形涵道、动力装置、无人机控制装置组成。其中侧窗滑流调节器包括引流舵、阻流板、拉杆、舵机。侧窗滑流调节器对称安装于涵道侧壁,其纵向位置位于桨叶的上方或下方。本发明的侧窗滑流调节器可引导无人机涵道外部的气流流经引流舵的上翼面,产生向上的升力和水平方向的推力,解决了常规涵道无人机没有水平运动直接控制通道的难题,可实现涵道无人机高精度的位置控制,同时上述结构简单轻巧、部件少、装配方便、生产成本低。生产成本低。生产成本低。
技术研发人员:张霄 蔡昕钰 郭雷 余翔 燕思萌 李晶 王悦 刘雅琪
受保护的技术使用者:北京航空航天大学
技术研发日:2021.10.25
技术公布日:2021/12/16