1.本发明涉及无人机技术领域,尤其涉及一种能稳定连接的无人机折叠机臂。
背景技术:
2.无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,多旋翼无人机具有操控简单、可靠性高,并且不需要跑道便可以垂直起降,起飞后可以在空中悬停等优势,因此在各个领域均得到了广泛应用,由于多翼无人机的翼长较大,不方便运输和存储,故而多旋翼无人机大多采用折叠机臂的方式。现有无人机的折叠机臂在弯折处存在间隙,飞行过程中旋翼传产生的震动沿机臂传到弯折处,容易导致连接处松动,使机臂出现大幅度的晃动,影响无人机飞行的安全性。因此,设计一种能放置机臂弯折处松动的稳定连接的无人机折叠机臂成为了急需解决的技术问题。
技术实现要素:
3.本发明为解决上述问题,提供了一种能稳定连接的无人机折叠机臂。
4.本实用新型的技术方案,一种能稳定连接的无人机折叠机臂,包括机臂以及弯折座,所述弯折座连接设置在机臂的一端,所述弯折座包括固定座、转动座以及连接件,所述固定座的边缘设有铰接轴以及若干第一锥面座,所述转动座固定连接铰接轴做可相对固定座转动,该转动座设有与第一锥面座的位置相对应的若干第二锥面座,所述第一锥面座以及第二锥面座的锥面相贴合,所述连接件可分离地连接固定座以及转动座的侧面。
5.采用上述结构后,通过将连接件同时与固定座以及转动座分离,使后两者能相对活动,转动座绕铰接轴转动靠近贴合无人机的机身,完成折叠收纳;通过将转动座绕铰接轴反向转动,至第一锥面座以及第二锥面座的锥面相靠近,再通过连接件连接固定座以及转动座的侧面施加预紧力,使第一锥面座以及第二锥面座的接触面紧密贴合,起到承担无人机飞行过程中施加至固定座与转动座的连接处的力,避免因产生松动而导致机臂晃动,影响无人机的飞行精度;实现了通过不同的锥面座相互贴合来承担无人机飞行过程中传到固定座与转动座的连接处的力,并通过连接件施加预紧力来消除间隙,避免连接处松动对无人机安全飞行造成影响,提高了飞行精度。
6.作为本实用新型的进一步改进,所述固定座以及转动座沿外周面均设有相同的连接凸环,该连接凸环的侧面设有连接外螺纹,所述连接件的中心设有连接孔,该连接孔的内壁设有与连接外螺纹相适应的连接内螺纹,所述内螺纹与外螺纹拧合连接固定座以及转动座。
7.采用上述结构后,通过连接孔的内螺纹与连接凸环上的外螺纹拧合或分离,能实现固定座以及转动座快捷固定或分离,提高机臂连接稳定性的同时,便于将磨损后的连接件取下更换。
8.作为本实用新型的进一步改进,所述铰接轴沿竖直方向设置。
9.采用上述结构后,通过将铰接轴沿竖直方向设置,使机臂由向下弯折变为向机身
侧面贴合弯折,无需加长无人机支撑脚的长度来适应机臂,横向折叠机臂后所占用的空间减少,提高竖直方向操作的便利性。
附图说明
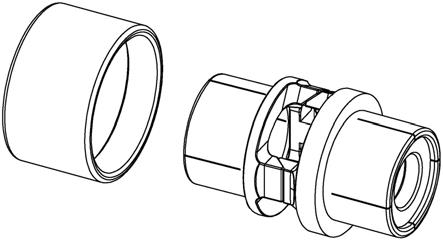
10.图1所示为本实用新型结构示意图。
11.图2所示为转动座弯折结构示意图。
12.图3所示为转动座连接结构示意图。
[0013]1‑
固定座,2
‑
转动座,3
‑
连接件,4
‑
铰接轴,5
‑
第一锥面座,6
‑
第二锥面座,7
‑
连接凸环,8
‑
连接孔。
具体实施方式
[0014]
如图1
‑
图3所示一种能稳定连接的无人机折叠机臂,包括机臂以及弯折座,所述弯折座连接设置在机臂的一端,所述弯折座包括固定座1、转动座2以及连接件3,所述固定座1的边缘设有铰接轴4以及若干第一锥面座5,所述转动座2固定连接铰接轴4做可相对固定座1转动,该转动座2设有与第一锥面座5的位置相对应的若干第二锥面座6,所述第一锥面座5以及第二锥面座6的锥面相贴合,所述连接件3可分离地连接固定座1以及转动座2的侧面。
[0015]
通过将连接件3同时与固定座1以及转动座2分离,使后两者能相对活动,转动座2绕铰接轴4转动靠近贴合无人机的机身,完成折叠收纳;通过将转动座2绕铰接轴4反向转动,至第一锥面座5以及第二锥面座6的锥面相靠近,再通过连接件3连接固定座1以及转动座2的侧面施加预紧力,使第一锥面座5以及第二锥面座6的接触面紧密贴合,起到承担无人机飞行过程中施加至固定座1与转动座2的连接处的力,避免因产生松动而导致机臂晃动,影响无人机的飞行精度;实现了通过不同的锥面座相互贴合来承担无人机飞行过程中传到固定座1与转动座2的连接处的力,并通过连接件3施加预紧力来消除间隙,避免连接处松动对无人机安全飞行造成影响,提高了飞行精度。
[0016]
所述固定座1以及转动座2沿外周面均设有相同的连接凸环7,该连接凸环7的侧面设有连接外螺纹,所述连接件3的中心设有连接孔8,该连接孔8的内壁设有与连接外螺纹相适应的连接内螺纹,所述内螺纹与外螺纹拧合连接固定座1以及转动座2。
[0017]
通过连接孔8的内螺纹与连接凸环7上的外螺纹拧合或分离,能实现固定座1以及转动座2快捷固定或分离,提高机臂连接稳定性的同时,便于将磨损后的连接件取下更换。
[0018]
所述铰接轴4沿竖直方向设置。
[0019]
通过将铰接轴4沿竖直方向设置,使机臂由向下弯折变为向机身侧面贴合弯折,无需加长无人机支撑脚的长度来适应机臂,横向折叠机臂后所占用的空间减少,提高竖直方向操作的便利性。
技术特征:
1.一种能稳定连接的无人机折叠机臂,包括机臂以及弯折座,所述弯折座连接设置在机臂的一端,其特征在于:所述弯折座包括固定座(1)、转动座(2)以及连接件(3),所述固定座(1)的边缘设有铰接轴(4)以及若干第一锥面座(5),所述转动座(2)固定连接铰接轴(4)做可相对固定座(1)转动,该转动座(2)设有与第一锥面座(5)的位置相对应的若干第二锥面座(6),所述第一锥面座(5)以及第二锥面座(6)的锥面相贴合,所述连接件(3)可分离地连接固定座(1)以及转动座(2)的侧面。2.根据权利要求1所述一种能稳定连接的无人机折叠机臂,其特征在于:所述固定座(1)以及转动座(2)沿外周面均设有相同的连接凸环(7),该连接凸环(7)的侧面设有连接外螺纹,所述连接件(3)的中心设有连接孔(8),该连接孔(8)的内壁设有与连接外螺纹相适应的连接内螺纹,所述内螺纹与外螺纹拧合连接固定座(1)以及转动座(2)。3.根据权利要求1所述一种能稳定连接的无人机折叠机臂,其特征在于:所述铰接轴(4)沿竖直方向设置。
技术总结
本实用新型涉及一种能稳定连接的无人机折叠机臂,包括机臂以及弯折座,所述弯折座连接设置在机臂的一端,所述弯折座包括固定座、转动座以及连接件,所述固定座的边缘设有铰接轴以及若干第一锥面座,所述转动座固定连接铰接轴做可相对固定座转动,该转动座设有与第一锥面座的位置相对应的若干第二锥面座,所述第一锥面座以及第二锥面座的锥面相贴合,所述连接件可分离地连接固定座以及转动座的侧面;实现了通过不同的锥面座相互贴合来承担无人机飞行过程中传到固定座与转动座的连接处的力,并通过连接件施加预紧力来消除间隙,避免连接处松动对无人机安全飞行造成影响,提高了飞行精度。精度。精度。
技术研发人员:吴培钢
受保护的技术使用者:温州塔罗航空科技有限公司
技术研发日:2021.06.15
技术公布日:2021/12/17