1.本实用新型涉及环境监测技术领域,具体为一种环境监测无人机。
背景技术:
2.随着我国近几年来环境污染状况日益严峻,以及人们对环保意识的逐渐增强的背景下,因此我国的环境污染监测与治理的任务也越来越重。国家对此也在大多数城市布设了环境监测设备,形成了分布密集的地面污染源监测网。然而我们也能清除的看到,依据地面监测数据所作出的预测与实际环境污染状况的发展还是存在较大差距,所以只依据地面监测数据所实施的治理手段,最后所达到的效果也不尽如人意。由于无人机监测具有立体监测、响应速度快、监测范围广、地形干扰小的优点,因此无人机在环境监测领域的运用越来越广泛。
3.现有环境监测无人机,如申请号为cn202020001010.1名称为“一种环境监测无人机”的中国专利,本实用新型公开了一种环境监测用无人机,包括无人机机身和安装在无人机机身底部两侧一组相对的支撑脚架,所述无人机机身两端安装有弧形防碰撞板,防碰撞板内设有缓冲机构,所述无人机本体内安装有环境监测机构。本实用新型的有益效果是,通过位于防碰撞板内的缓冲机构,可对防碰撞板起到缓冲作用,防止无人机在恶劣的地形或天气监测时发生碰撞损伤现象,环境监测机构可监测空气的温度湿度和雾霾信号,通过抽风机进行引风,提高监测效果,安装板为可拆卸结构,便于清理和维修。
4.现有技术的不足之处在于:环境监测无人机在使用时,通常是需要不断的更换拍摄角度,以满足监测工作的需要;传统的环境监测无人机在使用时,需要将整个无人机进行旋转,才能达到多角度拍摄的目的,操作不便,实用性较低;此外,现有的无人机支撑架无法折叠,在运输或者存放时会占用较大空间,导致运输以及存放不便。
技术实现要素:
5.本实用新型的目的是提供一种环境监测无人机,以解决上述现有技术中现有无人机不便于更换拍摄角度以及支撑架无法折叠的不足之处。
6.为了实现上述目的,本实用新型提供如下技术方案:一种环境监测无人机,包括无人机本体,所述无人机本体底部固定连接有一动力箱,所述动力箱底部转动连接有一监测装置,所述动力箱内设置有一用于驱动监测装置转动的驱动机构,所述驱动机构包括伺服电机,所述伺服电机转动轴上固定连接有一转动杆,所述转动杆上设置有一主齿轮,所述监测装置顶部上固定连接有一空心杆,所述空心杆转动连接在动力箱内,所述空心杆上固定连接有一从齿轮,所述主齿轮与从齿轮啮合。
7.进一步地,所述动力箱底部设置有一通槽,所述通槽内设置有一轴承,所述空心杆设置在轴承内部。
8.进一步地,所述无人机本体底部设置有多个固定架,每个所述固定架上均转动连接有支撑机构,所述支撑机构包括有支撑杆,所述支撑杆内竖直滑动设置有缓冲杆,所述支
撑杆与缓冲杆之间设置有第一弹簧。
9.进一步地,监测装置左侧一对缓冲杆之间及监测装置右侧一对缓冲杆之间均固定连接有连接杆。
10.进一步地,所述固定架上开设有转动槽,所述转动槽内转动设置有一转轴,所述转轴固定连接在支撑杆上,所述转轴与固定架之间设置有锁止机构。
11.进一步地,所述锁止机构包括套杆,所述套杆固定连接在转轴侧面上,所述套杆内滑动设置有一卡接杆,所述套杆与卡接杆之间设置有一第二弹簧,所述转动槽内开设有多个与卡接杆卡接配合的卡槽,所述第二弹簧的弹力驱动卡接杆卡接进卡槽内。
12.进一步地,所述无人机本体顶部上设置有太阳能板。
13.进一步地,所述监测装置包括摄像机、气象监测仪及空气监测仪。
14.与现有技术相比,本实用新型的有益效果为:通过无人机本体、动力箱、监测装置、伺服电机、转动杆、主齿轮、从齿轮、空心杆之间的配合,在需要更换拍摄角度时,启动伺服电机,伺服电机带动主齿轮转动,进而带动从齿轮转动,进而通过空心杆带动监测装置转动,从而实现调节监测装置拍摄角度的目的,操作简单方便,实用性高。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
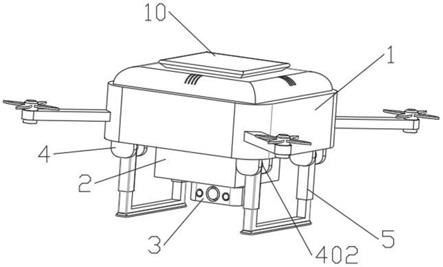
16.图1为本实用新型实施例提供的整体结构示意图;
17.图2为本实用新型实施例提供的另一视角整体结构示意图;
18.图3为本实用新型实施例提供的驱动机构结构示意图;
19.图4为本实用新型实施例提供的支撑机构剖视结构示意图;
20.图5为本实用新型实施例提供的锁止机构剖视结构示意图;
21.图6为本实用新型实施例提供的轴承与动力箱连接方式剖视结构示意图;
22.图7为本实用新型实施例提供的转动槽与及卡槽结构示意图。
23.附图标记说明:1、无人机本体;2、动力箱;201、通槽;202、轴承; 3、监测装置;301、摄像机;302、气象监测仪;303、空气监测仪;4、固定架;401、转动槽;402、转轴;5、支撑机构;501、支撑杆;502、第一弹簧;503、缓冲杆;6、驱动机构;601、伺服电机;602、转动杆;603、主齿轮;604、从齿轮;7、空心杆;8、锁止机构;801、套杆;802、第二弹簧;803、卡接杆;804、卡槽;9、连接杆;10、太阳能板。
具体实施方式
24.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
25.请参阅图1
‑
7,本实用新型实施例提供的一种环境监测无人机,包括无人机本体1,无人机本体1底部固定连接有一动力箱2,动力箱2底部转动连接有一监测装置3,动力箱2内设置有一用于驱动监测装置3转动的驱动机构6,驱动机构6包括伺服电机601,伺服电机601转动轴上固定连接有一转动杆602,转动杆602上设置有一主齿轮603,监测装置3顶部上固
定连接有一空心杆7,空心杆7转动连接在动力箱2内,空心杆7上固定连接有一从齿轮604,主齿轮603与从齿轮604啮合。
26.具体的,该环境监测无人机,包括无人机本体1,在无人机本体1底部设置有一个动力箱2,其中动力箱2内部的驱动机构6用于驱动监测装置3转动,在监测装置3顶部上固定连接有一空心杆7,其中空心杆7转动连接在动力箱2内部,并且空心杆7与无人机本体1连通,采用空心杆7的目的在于,带动监测装置3转动的同时能够使得监测装置3与无人机本体1连通,在空心杆7内设置有各种用于监测装置3工作的数据线,便于监测装置3的监测工作以及监测数据的传输;使用时,启动伺服电机601,伺服电机601转动轴转动带动转动杆602转动,进而带动主齿轮603转动,主齿轮603与从齿轮604啮合,进而带动从齿轮604转动,进而带动空心杆7转动,最终实现空心杆7带动监测装置3转动拍摄,从而实现该环境监测无人机的拍摄角度进行调节的作用。
27.动力箱2底部设置有一通槽201,通槽201内设置有一轴承202,空心杆7设置在轴承202内部。
28.优选的,通过在通槽201内部设置有轴承202,在空心杆7转动的同时减少阻力,便于空心杆7带动监测装置3转动,从而实现监测装置3拍摄角度调节的目的,提高该环境监测无人机的实用性。
29.无人机本体1底部设置有多个固定架4,每个固定架4上均转动连接有支撑机构5,支撑机构5包括有支撑杆501,支撑杆501内竖直滑动设置有缓冲杆503,支撑杆501与缓冲杆503之间设置有第一弹簧502。
30.优选的,其中固定架4的数量可以为4个,分别分布在无人机本体1 底部的四角,通过设置有支撑机构5,起到保护无人机本体的作用,通过在固定架4上转动连接支撑机构5,使得支撑机构5在不使用时可以进行折叠,便于运输以及存放,提高该环境监测无人机的实用性;在无人机降落时,缓冲杆503受到冲撞进行在支撑杆501内滑动进行挤压第一弹簧502,从而减少该无人机本体1所受到的冲撞力,保护该环境监测无人机。
31.监测装置3左侧一对缓冲杆503之间及监测装置3右侧一对缓冲杆503 之间均固定连接有连接杆9。
32.优选的,通过设置有连接杆9,便于相对应的两个支撑机构5同时展开同时收回,提高工作效率,其中监测装置3带镜头的一面为正面。
33.固定架4上开设有转动槽401,转动槽401内转动设置有一转轴402,转轴402固定连接在支撑杆501上,转轴402与固定架4之间设置有锁止机构8,锁止机构8包括套杆801,套杆801固定连接在转轴402侧面上,套杆801内滑动设置有一卡接杆803,套杆801与卡接杆803之间设置有一第二弹簧802,转动槽401内开设有多个与卡接杆803卡接配合的卡槽 804,第二弹簧802的弹力驱动卡接杆803卡接进卡槽804内。
34.优选的,需要将支撑机构5展开时,转动连接杆9,连接杆9带动两个支撑杆501转动,进而带动轴杆402在转动槽401内转动,在转动时,卡接杆803受到挤压向套杆801内滑动,进而挤压第二弹簧802,在卡接杆803转动至支撑机构5展开时所对应的卡槽804后,第二弹簧802恢复弹力的过程带动卡接杆803卡接进卡槽704内,进而将支撑机构5锁止,操作简单方便,其中锁止机构8的数量可以为2或者4个等;将支撑机构 5回收的过程与之相反,再次便不在赘述
35.无人机本体1顶部上设置有太阳能板10。
36.优选的,通过设置有太阳能板10,太阳能板10与该环境监测无人机的蓄电池电性连接,为蓄电池提供电力,通过设置太阳能板10,可以起到节约资源,保护环境的作用。
37.监测装置3包括摄像机301、气象监测仪302及空气监测仪303。
38.优选的,监测装置3包括摄像机301、气象监测仪302及空气监测仪 303,便于分开对环境中各个数据进行监测并且记录,进一步提高该环境监测无人机的实用性。
39.工作原理:需要进行调节监测装置3的角度时,启动伺服电机601,伺服电机601转动轴转动带动转动杆602转动,进而带动主齿轮603转动,主齿轮603与从齿轮604啮合,进而带动从齿轮604转动,进而带动空心杆7转动,最终实现空心杆7带动监测装置3转动拍摄,从而实现该环境监测无人机的拍摄角度进行调节的作用;在无人机降落时,缓冲杆503受到冲撞进行在支撑杆501内滑动进行挤压第一弹簧502,从而减少该无人机本体1所受到的冲撞力,保护该环境监测无人机;需要调节支撑机构5 时,转动连接杆9,连接杆9带动两个支撑杆501转动,进而带动轴杆402 在转动槽401内转动,在转动时,卡接杆803受到挤压向套杆801内滑动,进而挤压第二弹簧802,在卡接杆803转动至支撑机构5展开时所对应的卡槽804后,第二弹簧802恢复弹力的过程带动卡接杆803卡接进卡槽704 内,进而将支撑机构5锁止;该环境监测无人机,操作简单方便,效果好。
40.以上只通过说明的方式描述了本实用新型的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本实用新型的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本实用新型权利要求保护范围的限制。