1.本实用新型涉及微型飞行器技术领域,特别涉及一种扑翼机构。
背景技术:
2.微型飞行器是一种体积小、重量轻、隐蔽性与机动性强的无人飞行器,适合在狭小空间内飞行,在军事与商业领域中具有广阔的应用前景,目前,微型飞行器为获得更大的有效升力以及减小瞬时升力波动,尝试采用双扑翼的结构布局,但是双扑翼微型飞行器样机整体重量较大,并且在实际飞行过程中扑翼扑动会产生较大的噪音,进而限制了双扑翼微型飞行器的应用场景。
3.因此,一种能够减小扑翼扑动噪音以及降低整体结构重量的扑翼机构亟待研究。
技术实现要素:
4.针对上述现有技术存在的不足之处,本实用新型提供了一种扑翼机构,解决了现有技术中双扑翼微型飞行器样机整体重量较大,并且在实际飞行过程中扑翼扑动会产生较大的噪音的问题。
5.本实用新型提供了一种扑翼机构,包括:
6.扑翼架,设有条形孔;
7.连接杆,穿设在所述扑翼架上,并可沿所述条形孔的长度方向往复运动;
8.扑翼部,第一端可转动的设在所述扑翼架上;
9.传动带组件,所述连接杆和所述扑翼部的第一端通过所述传动带组件传动连接;
10.在所述连接杆沿所述条形孔长度方向往复运动时,所述扑翼部的第一端在所述传动带组件的带动下轴向转动。
11.进一步的,所述扑翼部包括两个转轮,两个所述转轮以所述条形孔的长度方向为中心线对称设置,并分别与所述扑翼架可转动连接,两个所述转轮分别通过所述传动带组件与所述连接杆传动连接。
12.进一步的,所述传动带组件包括传动带,所述传动带套设在两个所述转轮上,所述传动带在所述条形孔的两侧分别设有一交叉点,所述连接杆穿过所述传动带并位于两个所述交叉点之间。
13.进一步的,所述传动带组件包括两根传动带,所述连接杆通过一所述传动带与两个所述转轮中的一所述转轮传动连接,所述连接杆通过另一所述传动带与两个所述转轮中的另一所述转轮传动连接。
14.进一步的,所述传动带组件还包括限位块,所述限位块设在所述连接杆上,并靠近所述传动带远离所述条形孔的一侧设置。
15.进一步的,所述扑翼机构还包括曲柄机构和转动组件,所述曲柄机构包括转动件,所述转动件的一端与所述转动组件偏心连接,所述转动件的另一端与所述连接杆活动连接,所述转动件可随所述转动组件的轴向旋转而偏心转动,以使所述连接杆可沿所述条形
孔长度方向往复运动。
16.进一步的,所述转动组件包括行星齿轮、驱动轮和齿圈,所述行星齿轮轴向可转动设在所述驱动轮的第一面上,所述转动件偏心设在所述驱动轮的第二面上,所述齿圈靠近所述驱动轮的第一面并与所述驱动轮同轴设置,所述行星齿轮与所述齿圈的内齿圈啮合;所述扑翼机构还包括驱动组件,所述驱动组件与所述行星齿轮驱动连接,用于带动所述行星齿轮在所述齿圈的内齿圈上转动进而带动所述驱动轮轴向转动。
17.进一步的,所述驱动组件包括第一电机、第一电机齿轮、传动齿轮和驱动齿轮,所述第一电机齿轮与所述传动齿轮啮合,所述驱动齿轮设在所述传动齿轮的中心位置,所述驱动齿轮与所述驱动轮同轴设置,且所述驱动齿轮与所述行星齿轮啮合,所述第一电机与所述第一电机齿轮驱动连接。
18.进一步的,所述扑翼机构还包括转速控制组件,所述转速控制组件包括第二电机、第二电机齿轮以及设在所述齿圈周侧的外齿圈,所述第二电机齿轮与所述外齿圈啮合,所述第二电机与所述第二电机齿轮驱动连接,所述第二电机用于驱动所述外齿圈转动,以控制所述外齿圈内的所述齿圈的转动速度。
19.进一步的,所述转动组件、所述驱动组件和所述转速控制组件均设在所述扑翼架上。
20.本实用新型提供的扑翼机构,通过连接杆利用传动带组件与扑翼部的第一端传动连接,使连接杆沿扑翼架上条形孔长度方向往复运动时,连接杆带动扑翼部的第一端轴向转动,以实现扑翼部的扑动,其中,通过采用传动带组件使连接杆和扑翼部的第一端传动连接,可以减小扑翼扑动的噪音,并减轻整体结构的重量。
21.本实用新型的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本实用新型而了解。本实用新型的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
22.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
23.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
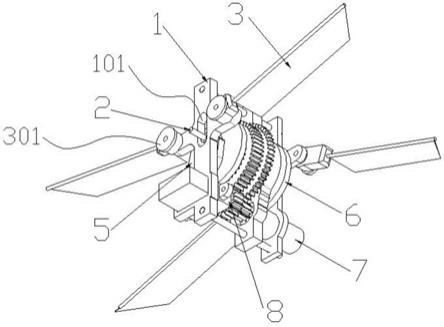
24.图1为扑翼机构的整体结构图;
25.图2为扑翼机构的扑翼部一种连接方式的结构图;
26.图3为扑翼机构的扑翼部另一种连接方式的结构图;
27.图4为扑翼机构的结构爆炸侧视图。
28.图中:
[0029]1‑
扑翼架,101
‑
条形孔;
[0030]2‑
连接杆;
[0031]3‑
扑翼部,301
‑
转轮;
[0032]4‑
传动带,401
‑
交叉点;
[0033]5‑
曲柄机构,501
‑
转动件;
[0034]6‑
转动组件,601
‑
行星齿轮,602
‑
驱动轮,603
‑
齿圈;
[0035]7‑
驱动组件,701
‑
第一电机,702
‑
第一电机齿轮,703
‑
传动齿轮,704
‑
驱动齿轮;
[0036]8‑
转速控制组件,801
‑
第二电机,802
‑
第二电机齿轮,803
‑
外齿圈。
具体实施方式
[0037]
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0038]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0039]
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0040]
本实用新型提供了一种扑翼机构,参见图1,包括扑翼架1,设有条形孔101;连接杆2,穿设在扑翼架1上,并可沿条形孔101的长度方向往复运动;扑翼部3,第一端可转动的设在扑翼架1上;传动带组件,连接杆2和扑翼部3的第一端通过传动带组件传动连接;在连接杆2沿条形孔101长度方向往复运动时,扑翼部3的第一端在传动带组件的带动下轴向转动。
[0041]
本实用新型提供的扑翼机构,通过连接杆2利用传动带组件与扑翼部3的第一端传动连接,使连接杆2沿扑翼架1上条形孔101长度方向往复运动时,连接杆2带动扑翼部3的第一端轴向转动,以实现扑翼部3的扑动,其中,通过采用传动带组件使连接杆2和扑翼部3的第一端传动连接,可以减小扑翼扑动的噪音,并减轻整体结构的重量。
[0042]
具体地,在上述实施例中,扑翼部3包括两个转轮301,两个转轮301以条形孔101的长度方向为中心线对称设置,并分别与扑翼架1可转动连接,两个转轮301分别通过传动带组件与连接杆2传动连接。在本实施方式中,两个转轮301对称设置,以带动扑翼部3以条形孔101的长度方向对称扑动,使得整个扑翼机构保持结构稳定,同时采用传动带组件的传动连接方式,使得在带动扑翼部3扑动的过程中,整个传动结构具有良好的挠性,可缓和冲击,吸收振动。
[0043]
进一步的,参见图2,传动带组件包括传动带4,传动带4套设在两个转轮301上,传动带4在条形孔101的两侧分别设有一交叉点401,连接杆2穿过传动带4并位于两个交叉点401之间。在本实施方式中,将传动带4以开口式带传动的连接方式套设在两个转轮301上,再将两段平行的传动带4进行交叉形成两个交叉点401,分别位于条形孔101的两侧,连接杆2穿过两个交叉点401之间的传动带4,后沿着条形孔长度方向往复运动,仅通过一根传动带4便可带动两个转轮301轴向转动,使得传动结构更加紧凑,传动效率更高。
[0044]
进一步的,参见图3,传动带组件包括两根传动带4,连接杆2通过一传动带4与两个
转轮301中的一转轮301传动连接,连接杆2通过另一传动带4与两个转轮301中的另一转轮301传动连接。在本实施方式中,两组传动带4与两个转轮301之间的传动连接皆为开口式带传动连接,利用两组开口式带传动连接可以实现在连接杆2的运动下带动两个转轮301同步轴向转动,进而使得扑翼部3同步扑动,此连接方式保证了即使在一组传动带4出现损坏的情况下也能使扑翼机构的其他扑翼部3进行扑动动作,提高了扑翼机构的容错率。
[0045]
具体地,在上述实施例中,传动带组件还包括限位块,限位块设在连接杆2上,并靠近传动带4远离条形孔101的一侧设置。在本实施方式中,通过在连接杆2上设置限位块,可以防止传动带4在传动过程中拉扯过于激烈,导致传动带4从连接杆2上脱落,限位块的存在使得结构更加稳定可靠,增加扑翼机构在实际飞行中的安全性。
[0046]
进一步的,扑翼机构还包括曲柄机构5和转动组件6,曲柄机构5包括转动件501,转动件501的一端与转动组件6偏心连接,转动件501的另一端与连接杆2活动连接,转动件501可随转动组件6的轴向旋转而偏心转动,以使连接杆2可沿条形孔101长度方向往复运动。在本实施方式中,通过转动件501将转动组件6的轴向转动转化为连接杆2的移动,采用曲柄机构5使得传动结构简单高效,节省空间,减轻整体结构的重量。
[0047]
进一步的,参见图4,转动组件6包括行星齿轮601、驱动轮602和齿圈603,行星齿轮601轴向可转动设在驱动轮602的第一面上,转动件501偏心设在驱动轮602的第二面上,齿圈603靠近驱动轮602的第一面并与驱动轮602同轴设置,行星齿轮601与齿圈603的内齿圈啮合;扑翼机构还包括驱动组件7,驱动组件7与行星齿轮601驱动连接,用于带动行星齿轮601在齿圈603的内齿圈上转动进而带动驱动轮602轴向转动。
[0048]
进一步的,驱动组件7包括第一电机701、第一电机齿轮702、传动齿轮703和驱动齿轮704,第一电机齿轮702与传动齿轮703啮合,驱动齿轮704设在传动齿轮703的中心位置,驱动齿轮704与驱动轮602同轴设置,且驱动齿轮704与行星齿轮601啮合,第一电机701与第一电机齿轮702驱动连接。
[0049]
在本实施方式中,扑翼机构包括两组同轴设置的转动组件6,传动齿轮703的两侧分别设有一驱动齿轮704,每一驱动齿轮704均可与一组行星齿轮601啮合,第一电机701驱动第一电机齿轮702转动后再由与第一电机齿轮702啮合的传动齿轮703带动位于自身中心的驱动齿轮704转动,在两组齿圈603保持相对静止的情况下,两组同轴的行星齿轮601在与各自分别啮合的驱动齿轮704的驱动下以相同的旋转速度同步轴向旋转,以带动两组同轴的驱动轮602以相同的速度同步进行轴向转动,通过第一电机齿轮702与传动齿轮703啮合的传动结构具有较高的传动效率和机构稳定性的同时,还能够使整体传动结构的承载能力高且具有较高的平稳性。
[0050]
进一步的,扑翼机构还包括转速控制组件8,转速控制组件8包括第二电机801、第二电机齿轮802以及设在齿圈603周侧的外齿圈803,第二电机齿轮802与外齿圈803啮合,第二电机801与第二电机齿轮802驱动连接,第二电机801用于驱动外齿圈803转动,以控制外齿圈803内的齿圈603的转动速度。在本实施方式中,在扑翼机构中加入转速控制组件8可以使两组转动组件6产生转速差,以使扑翼机构中的扑翼具有变相位扑动的功能,当扑翼机构需要改变相位差时,通过控制第二电机801驱动第二电机齿轮802转动,使得与第二电机齿轮802啮合的外齿圈803带动一组转动组件6的齿圈603与另一组转动组件6的齿圈603产生相对运动,导致与一组转动组件6的齿圈603啮合的行星齿轮601转速发生改变,以实现两组
转动组件6之间的驱动轮602产生转速差,进而改变与两组转动组件分别连接的扑翼部3的扑动相位差。
[0051]
进一步的,转动组件6、驱动组件7和转速控制组件8均设在扑翼架1上。在本实施方式中,将整体结构都设在扑翼架1上使得结构更加稳定,且方便将扑翼机构整体固定在微型飞行器上。
[0052]
显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。