1.本发明涉及无人机技术领域,特别是一种垂直起降滑翔无人机。
背景技术:
2.随着科学技术的迅猛发展,近些年来,无人机对于各个行业的应用发展的也日益广泛,现阶段,无人机的应用已经涉及到航拍、农林植保、地质勘探电力巡检、油气管路巡查、高速公路事故管理、森林防火巡查、污染环境勘察,应急救援与救护、抢险救灾、海岸线巡查等领域应用。
3.无人机为不载有操作人员可以自主飞行或遥控驾驶的飞行器,其中,多旋翼无人机是发展较为成熟、应用较多的无人机类型。多旋翼无人机是一种具有三个及以上旋翼轴的特殊的无人驾驶旋翼飞行器,具有操控性强、可垂直起降和悬停等优点,用途十分广泛。
4.在现有的多旋翼无人机前飞过程中,后螺旋桨处于前螺旋桨的尾流中,螺旋桨产生升力时会引发流经螺旋桨的气流向下运动(该向下的速度分量称为下洗),因此,后螺旋桨的工作环境存在着前螺旋桨产生的下洗速度,相比前螺旋桨产生同样大小的拉力,后螺旋桨需要更高的转速,后螺旋桨需要提供大于前螺旋桨的拉力才能维持无人机的平衡,而螺旋桨是完全由依靠固定电机提供动力,会导致多旋翼无人机在前飞巡航时能量消耗过大,导致该类型的多旋翼无人机有效飞行行程过短的问题,而且在低空巡航过程中,由于其螺旋桨产生的飞行噪声非常大,会对行人造成影响。
技术实现要素:
5.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
6.因此,本发明所要解决的技术问题是:无人机在前飞巡航时能量消耗过大,导致该类型的多旋翼无人机有效飞行行程过短的问题,而且在低空巡航过程中,由于其螺旋桨产生的飞行噪声非常大,会对行人造成影响。
7.为解决上述技术问题,本发明提供如下技术方案:一种垂直起降滑翔无人机,其包括机身,所述机身两侧设置有机翼,机翼外壁套设有滑套,机身和机翼上分别设置有螺旋桨,所述机身内部设置有中空内腔,中空内腔内设置有容纳壳,机身上的螺旋桨设置于容纳壳上,容纳壳连接通气管和导流管;调节组件,所述调节组件包括活动环、芯轴、活动板、第一挡板和支杆,所述活动环内壁连接支杆一端,支杆另一端连接芯轴,所述活动环上设置有活动板,相对靠近机身的活动板上设置有第一挡板,活动环和活动板活动设置于容纳壳内壁。
8.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:还包括传动组件,传动组件设置于中空内腔中,所述传动组件包括第一丝杆、第二丝杆、第三丝杆、锥齿轮、传动件和从动齿轮,所述第一丝杆、第二丝杆和第三丝杆一端分别设置有锥齿轮,并且锥齿轮依
次啮合连接,第一丝杆一端连接电动机m,第一丝杆另一端设置通过传动件连接从动齿轮,从动齿轮设置于芯轴相对远离第一挡板一侧,所述第二丝杆和第三丝杆另一端分别通过连接件连接滑套。
9.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述传动件包括第一套管、固定座、固定柱、限位轴、第二套管和主动齿轮,所述第一套管内壁设置有螺纹,并且第一套管外壁为方形,所述第一丝杆螺纹连接第一套管内壁,第一套管滑动穿过固定座,固定座设置于中空内腔腔壁上,第一套管端头固定连接固定柱,固定柱外壁上设置有限位轴。
10.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述第二套管内壁设置有限位槽,第二套管外壁固定连接主动齿轮,主动齿轮啮合连接从动齿轮,所述固定柱滑动连接第二套管内壁,并且限位轴滑动连接限位槽内壁。
11.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述限位槽包括第一直线段、螺旋段和第二直线段,所述第一直线段、螺旋段和第二直线段依次连通,并设置在第二套管内壁。
12.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述中空内腔内设置有隔板,第二套管穿过隔板,并且第二套管外壁设置有固定环,固定环位于隔板两侧。
13.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述容纳壳设置在螺旋桨底部,并且两端为圆管部,通气管连通圆管部,活动环和活动板外壁贴合圆管部内壁,第一挡板连接在活动板上,转动连接圆管部内壁。
14.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述导流管内壁设置有若干平行的导流板,并且导流管靠近第一挡板一端内壁设置有第二挡板,第二挡板与导流管端口形成开口。
15.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述连接件包括固定块和内螺纹管,所述内螺纹管内壁设置有螺纹,第二丝杆和第三丝杆相对远离锥齿轮一端,分别螺纹连接内螺纹管,内螺纹管穿过机身侧壁,设置于固定块上,固定块连接滑套外壁。
16.作为本发明所述垂直起降滑翔无人机的一种优选方案,其中:所述电动机m与锥齿轮设置在保护壳内部,保护壳设置于中空内腔底壁上,第一丝杆、第二丝杆和第三丝杆转动穿过保护壳壁,螺纹方向相同,并且第一丝杆、第二丝杆和第三丝杆螺纹方向相同。
17.本发明的有益效果:本发明通过机身上的螺旋桨转动时,能够将气流吹入容纳壳中,通过通气管向下吹出,使无人机能够垂直起降,无动力滑行时,将机翼上的螺旋桨关闭,能够减少机翼上的螺旋桨在滑行的带来的风阻,滑套和机翼为流线形,风阻更小,能够消除螺旋桨的噪音,避免噪音对行人的影响,通过机身上的螺旋桨,将上方吸入容纳壳的气流,通过开口进入导流管,从无人机尾部吹出,减少尾部气流乱流,无人机能够进行有动力滑行;工作模式多样,能够有效节约无人机巡航时的能量,增加无人机的有效航程。
附图说明
18.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本
领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
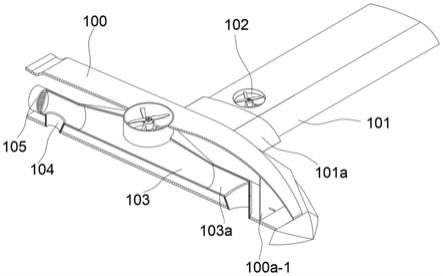
19.图1为本发明中的机身剖视图。
20.图2为本发明中的调节组件结构示意图。
21.图3为本发明中的导流管结构示意图。
22.图4为本发明中的传动组件结构示意图。
23.图5为本发明中的传动件结构剖视图。
24.图6为本发明中的第二套管剖视图。
25.图7为本发明中的保护壳剖视图。
26.图8为本发明中的无人机垂直升降时示意图。
27.图9为本发明中的无人机滑翔时示意图。
28.图中:100机身,100a中空内腔,100a
‑
1隔板,101机翼,101a滑套,101b连接件,101b
‑
1固定块,101b
‑
2内螺纹管,102螺旋桨,103容纳壳,103a圆管部,104通气管,105导流管,105a导流板,105b第二挡板,200调节组件,201活动环,202芯轴,203活动板,204第一挡板,205支杆,300传动组件,301第一丝杆,302第二丝杆,303第三丝杆,304锥齿轮,305传动件,305a第一套管,305b固定座,305c固定柱,305d限位轴,305e第二套管,305e
‑
1固定环,305f主动齿轮,305g限位槽,305g
‑
1第一直线段,305g
‑
2螺旋段,305g
‑
3第二直线段,306从动齿轮,a保护壳,m电动机。
具体实施方式
29.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
30.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
31.其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
32.实施例1
33.参照图1、2,为本发明第一个实施例,该实施例提供了一种垂直起降滑翔无人机,其能实现垂直起降。
34.一种垂直起降滑翔无人机,包括机身100和调节组件200,机身100两侧设置有机翼101,机身100两侧固定连接机翼101,机翼101能够在巡航飞行的时候进行滑翔,有利于节省电量,增加有效飞行距离,机翼101外壁套设有滑套101a,滑套101a能够在机翼101外壁滑动,机身100和机翼101上分别设置有螺旋桨102,通过现有的螺旋桨102,在螺旋桨102转动时能够为机身100和机翼200提供向上和水平飞行的升力,机身100内部设置有中空内腔100a,中空内腔100a内设置有容纳壳103,机身100上的螺旋桨102设置于容纳壳103上,容纳壳103连接通气管104和导流管105,气流从导流管105内部穿过后,能够变得平稳,105机身100上的螺旋桨102转动时,能够将气流吹入容纳壳103中,通过通气管104向下吹出,使无人
机能够垂直起降。
35.调节组件200包括活动环201、芯轴202、活动板203、第一挡板204和支杆205,活动环201内壁连接支杆205一端,活动环201内壁固定连接若干根支杆205一端,支杆205另一端连接芯轴202,芯轴202转动时能够通过支杆205带动活动环201转动,活动环201上设置有活动板203,活动环201转动时能够带动活动板203转动,相对靠近机身100的活动板203上设置有第一挡板204,活动环201和活动板203活动设置于容纳壳103内壁;芯轴202转动时能够通过支杆205带动活动环201转动,活动环201转动时能够带动活动板20转动,挡住通气管104,此时气流不能通过通气管104向下吹出,气流会通过容纳壳103上的导流管105向机身100后方吹出,为无人在水平滑翔时也提供动,有利于使滑翔距离更远。
36.实施例2
37.参照图3~6,为本发明第二个实施例,该实施例基于上一个实施例,
38.进一步的,还包括传动组件300,传动组件300设置于中空内腔100a中,传动组件包括第一丝杆301、第二丝杆302、第三丝杆303、锥齿轮304、传动件305和从动齿轮306,第一丝杆301、第二丝杆302和第三丝杆303一端分别设置有锥齿轮304,并且锥齿轮304依次啮合连接,第一丝杆301、第二丝杆302和第三丝杆303一端分别固定连接的穿过锥齿轮304,第一丝杆301一端连接电动机m,电动机m工作时能够带动第一丝杆301转动,第一丝杆301通过与第二丝杆302和第三丝杆303和啮合的锥齿轮304,能够在锥齿轮304的作用下带动第二丝杆302和第三丝杆303转动;第一丝杆301另一端设置通过传动件305连接从动齿轮306,第一丝杆301通过传动件305能够带动从动齿轮306转动,从动齿轮306设置于芯轴202相对远离第一挡板204一侧,从动齿轮306转动时能够带动芯轴202转动,第二丝杆302和第三丝杆303另一端分别通过连接件101b连接滑套101a,第二丝杆302和第三丝杆303转动时能够分别通过连接件101b带动滑套101a在机翼101上滑动,滑套101a在机翼101上滑动时,能够遮挡住或者露出机翼100上的螺旋桨102。
39.进一步的,传动件305包括第一套管305a、固定座305b、固定柱305c、限位轴305d、第二套管305e和主动齿轮305f,第一套管305a内壁设置有螺纹,并且第一套管305a外壁为方形,防止第一套管305a在固定座305b中滑动时,出现相对转动,第一丝杆301螺纹连接第一套管305a内壁,第一套管305a滑动穿过固定座305b,固定座305b设置于中空内腔100a腔壁上,固定座305b固定安装在中空内腔100a腔壁上,第一套管305a端头固定连接固定柱305c,固定柱305c形状为圆柱体,固定柱305c外壁上设置有限位轴305d;第一丝杆301转动时,在螺纹的作用下能使第一套管305a轴向移动,在固定座305b中滑动,第一套管305a能够推动固定柱305c移动,固定柱305c移动时能够带动限位轴305d移动。
40.进一步的,第二套管305e内壁设置有限位槽305g,限位槽305g围绕第二套管305e内壁设置有一定的旋转角度,第二套管305e外壁固定连接主动齿轮305f,主动齿轮305f啮合连接从动齿轮306,第二套管305e转动时能够带动主动齿轮305f转动,主动齿轮305f转动时能够带动从动齿轮306转动,固定柱305c滑动连接第二套管305e内壁,并且限位轴305d滑动连接限位槽305g内壁,固定柱305c能够在第二套管305e内壁滑动,并且固定柱305c径向尺寸大于第一套管305a,便于固定柱305c插入第二套管305e中,防止第一套管305a卡在第二套管305e外面,限位轴305d能够在限位槽305g内壁滑动,能够在限位槽305g的作用下推动第二套管305e转动。
41.进一步的,限位槽305g包括第一直线段305g
‑
1、螺旋段305g
‑
2和第二直线段305g
‑
3,螺旋段305g
‑
2围绕第二套管305e内壁螺旋设置,并且螺旋段305g
‑
2长度远大于螺旋角度,便于限位轴305d能够在螺旋段305g
‑
2内壁滑动,限位轴305d在螺旋段305g
‑
2内壁滑动,由于第一套管305a、固定柱305c和限位轴305d无法转动,能够在螺旋段305g
‑
2螺旋角度的作用下带动第二套管305e转动一定角度,第一直线段305g
‑
1、螺旋段305g
‑
2和第二直线段305g
‑
3依次连通,并设置在第二套管305e内壁,限位轴305d第一直线段305g
‑
1。
42.进一步的,中空内腔100a内设置有隔板100a
‑
1,隔板100a
‑
1固定安装在中空内腔100a内壁,第二套管305e穿过隔板100a
‑
1,第二套管305e能够在隔板100a
‑
1中转动,并且第二套管305e外壁设置有固定环305e
‑
1,第二套管305e和固定环305e
‑
1固定连接,第二套管305e转动时能够带动固定环305e
‑
1转动,固定环305e
‑
1位于隔板100a
‑
1两侧,固定环305e
‑
1贴合在隔板100a
‑
1两侧,并且能够转动,固定环305e
‑
1有利于提高第二套管305e转动时的稳定性,防止第二套管305e出现轴向移动,导致主动齿轮305f和从动齿轮306脱离啮合。
43.进一步的,容纳壳103设置在螺旋桨102底部,并且两端为圆管部103a,通气管104连通圆管部103a,通气管104朝下,气流能够从通气管104中向下喷出,活动环201和活动板203外壁贴合圆管部103a内壁,活动环201和活动板203和能够在圆管部103a内壁转动,并且相邻的活动环201之间可以设置加强杆,以增加结构强度,第一挡板204连接在活动板203上,转动连接圆管部103a内壁,活动板203转动时能够带动第一挡板204在圆管部103a内壁转动。
44.进一步的,导流管105内壁设置有若干平行的导流板105a,导流管105能够使经过的气流变得平稳,有利于无人机进行水平滑行,减少尾部气流乱流,并且导流管105靠近第一挡板204一端内壁设置有第二挡板105b,第二挡板105b与导流管105端口形成开口105c,第一挡板204在圆管部103a内壁转动到挡住开口105c时,此时第一挡板204和第二挡板105b相对封闭圆管部103a与导流管105,活动板203露出通气管104端口,气流不能进入导流管105,气流能够从通气管104中向下喷出,为无人机带来向上的升力,进行垂直起降。
45.进一步的,连接件101b包括固定块101b
‑
1和内螺纹管101b
‑
2,内螺纹管101b
‑
2内壁设置有螺纹,第二丝杆302和第三丝杆303相对远离锥齿轮304一端,分别螺纹连接内螺纹管101b
‑
2,内螺纹管101b
‑
2穿过机身100侧壁,设置于固定块101b
‑
1上,固定块101b
‑
1连接滑套101a外壁,第二丝杆302和第三丝杆303转动时,在螺纹的作用下能够分别使相应的内螺纹管101b
‑
2移动,内螺纹管101b
‑
2能够通过固定块101b
‑
1带动滑套101a在机翼上滑动。
46.进一步的,电动机m与锥齿轮304设置在保护壳a内部,有利于对电动机m与锥齿轮304起到保护左右,防止有异物卡住锥齿轮304,保护壳a设置于中空内腔100a底壁上,第一丝杆301、第二丝杆302和第三丝杆303转动穿过保护壳a壁,并且第一丝杆301、第二丝杆302和第三丝杆303螺纹方向相同,第一丝杆301上的锥齿轮304带动第二丝杆302和第三丝杆303上的锥齿轮304转动时,第二丝杆302和第三丝杆303上的锥齿轮304转动方向相反,所以第二丝杆302和第三丝杆303转动方向相反,在螺纹的作用下第二丝杆302相应的内螺纹管101b
‑
2向电动机m方向移动时,第三丝杆303相应的内螺纹管101b
‑
2也向电动机m方向移动,内螺纹管101b
‑
2能够通过固定块101b
‑
1带动各自的滑套101a,同时靠近电动机m方向移动,或者远离电动机m方向移动。
47.实施例3
48.参照图3~6,为本发明第三个实施例,该实施例基于以上两个实施例,使用时,活动板203转动到通气管104端口的旁边,同时第一挡板204在挡住开口105c,此时第一挡板204和第二挡板105b相对封闭圆管部103a与导流管105,气流不能进入导流管105,机身100和机翼101上的螺旋桨102转动,将气流从无人机上方的吸入,机翼101上的螺旋桨102直接将气流向下喷出;机身100上的螺旋桨102吸入气流后,气流进入容纳壳103,由于此时气流不能进入导流管105,气流只能通过通气管104向下吹出,使无人机能够垂直起降。
49.当无人机进入平飞滑行时,机翼101有利于无人机利用惯性滑行的更远,通过电动机m带动第一丝杆301转动,第一丝杆301通过与第二丝杆302和第三丝杆303和啮合的锥齿轮304,能够在锥齿轮304的作用下带动第二丝杆302和第三丝杆303转动,第二丝杆302和第三丝杆303转动时,由于第二丝杆302和第三丝杆303螺纹方向相同,转动方向相反,能够使第二丝杆302和第三丝杆303上相应的内螺纹管101b
‑
2,同时向远离电动机m方向移动,内螺纹管101b
‑
2能够通过固定块101b
‑
1带动滑套101a在机翼101上滑动,盖住机翼101上的螺旋桨103;
50.同时第一丝杆301转动时,在螺纹的作用下能使第一套管305a轴向移动,在固定座305b中滑动,第一套管305a能够推动固定柱305c移动,固定柱305c移动时能够带动限位轴305d移动,限位轴305d初始位置在限位槽305g的第一直线段305g
‑
1中,滑动到螺旋段305g
‑
2位置后,螺旋段305g
‑
2围绕第二套管305e内壁螺旋设置,并且螺旋段305g
‑
2长度远大于螺旋角度,由于第一套管305a、固定柱305c和限位轴305d无法转动,能够在螺旋段305g
‑
2螺旋角度的作用下带动第二套管305e转动一定角度,限位轴305d继续轴向移动,进入第二直线段305g
‑
3后,第二套管305e就不再转动,螺旋段305g
‑
2螺旋角度的螺旋角度就是第二套管305e转动角度,第二套管305e转动时能够带动主动齿轮305f转动,主动齿轮305f转动时能够带动从动齿轮306转动,从动齿轮306转动时能够带动芯轴202转动,芯轴202转动时能够通过支杆205带动活动环201转动,活动环201转动时能够带动活动板203转动,活动板203挡住通气管104时,第一挡板204随活动板203转动露出开口105c,此时机身100上的螺旋桨从机身100上方吸入容纳壳103的气流,不能通过通气管104向下吹出,只能通过开口105c进入导流管105,导流管105能够使经过的气流变得平稳,从无人机尾部吹出,减少尾部气流乱流,有利于无人机进行水平滑行,进行有动力滑行,能够减少螺旋桨102带来的噪音,减小对行人的影响。
51.滑行状态时将机翼101上的螺旋桨103关闭,节约无人机的能量,同时能够减少机翼101上的螺旋桨103在滑行的带来的风阻,滑套101a和机翼101为流线形,风阻更小;也可以将机身100上的螺旋桨关闭,进行无动力滑行,能够消除螺旋桨102的噪音,避免噪音对行人的影响。
52.应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。