1.本发明涉及飞行器的电力供应领域。本发明涉及一种用于控制飞行器的电能量电力供应网络的方法。
2.本发明尤其用于如下电架构环境,该电架构集成包括燃气涡轮的动力源以及诸如电推进器的电能负载或消耗者,燃气涡轮与形成涡轮发电机的发电机相关联。
3.本发明不针对于任何特定飞行器,且可应用于直升机或多旋翼类型的固定翼飞行器和旋翼式飞行器。
背景技术:
4.现有技术包括但不限于文献us
‑
a1
‑
2008/174177、de
‑
a1
‑
10 2015 116 154、us
‑
a
‑
5 483 142和fr
‑
a1
‑
2 981 225 a1。
5.按照已知的方式,目前飞行器的推进通过机械地耦合到推进元件的燃气涡轮来完成,推进元件特别是用于现代涡轮风扇发动机的风扇、用于涡轮螺桨发动机的螺旋桨、或者用于涡轮轴发动机的旋翼,特别是用于直升机涡轮轴发动机的旋翼。
6.众所周知,涡轮机与电流发生器和用于驱动推进器的电动机耦合,从而形成推进系统。
7.因此,参考图1,提出一种高压直流(hvdc)电力供应网络1,该电力供应网络在交流发电机3的输出端具有至少一个整流器2,接着是多个待供电的电负载4(电负载包括例如在电动机的输入端的逆变器,以输送逆变器的输出端的交变电流来用于电动机的电力供应),至少一个整流器2和电负载4连接到配电总线5。
8.对于这种电架构,待供电的电能量源和电负载的数量是已知的,因此这种电力供应网络的主要功能是确保hvdc电力供应网络上足够的电压水平,且无论待供电的电负载的需求如何,均提供必要的电能。电能量源和待供电的电负载连接在hvdc配电总线上。
9.这种配电总线包括电容器,以对提供给连接到配电总线,特别是连接到转换器的各种电负载的电压进行过滤。因此,这些电容器必须在电力供应网络通电之前(即,在电能量源施加电压之前)预充电(换句话说,这些电容器必须具有足够的初始静电能量水平),以避免破坏这些电容器或者连接到这些电容器的系统,导致hvdc电力供应网络不可用。实际上,放电电容器的突然通电相当于产生能够引起显著损坏的短路电流。
10.因此,参考图2,提出在驱动电动机4的逆变器8通电之前,使用附加的阻抗性预充电电路6连接到配电总线5的电容器7的端子,以利用来自直流电压源2(例如,电池或二极管整流器)的电能对该电容器进行预充电。一旦完成预充电,归因于电阻器(该电阻器随后在正常操作过程中通过电开关短路),使得该预充电电路6能够控制电压上升以限制电容器7中的电流。
11.此外,当配电总线5断电时,实现电阻器和电开关的放电电路3与配电总线5并联使用,以确保电网安全,特别是在例如用于维护工作的人为干预的情况下确保电网安全。该放电电路使得能够确保电容器7放电,以便在放电电路的电阻作用下以焦耳效应的形式排出
存储在电容器7中的能量,直到达到某一可接受的电压阈值。
12.这些电容器7预充电和放电电路的缺点在于:当在飞行器的飞行阶段期间不使用时,这些电路携带在飞行器上,从而构成飞行器上携带的不必要的额外重量。然而,提升空气动力学性能的目的之一是尽可能地减少携带的重量。
13.已提出使得在飞行器上能够不携带预充电和放电电路的解决方案。这些解决方案包括专用系统,专用系统不打算携带在飞行器上,而是留在地面上,但是仍然需要连接装置通向配电总线,使得连接接口及其连接器必须总是携带在飞行器上。
14.本发明的目的是针对上述缺点提供一种简单而有效的解决方案。
技术实现要素:
15.为此,本发明涉及一种用于控制飞行器的电力供应网络的方法,该电力供应网络包括:
16.‑
飞行器的涡轮
‑
交流发电机的至少一个发电机,适于从燃气涡轮提供电能量源,并包括与整流器相关联的至少一个定子;
17.‑
至少一个配电总线,包括至少一个电容器;
18.‑
至少一个待供电电动机,与逆变器相关联;以及
19.‑
至少一个能量存储装置,
20.其特征在于,方法包括如下步骤:
21.‑
当至少一个电容器(70)放电且燃气涡轮可用时,在电力供应网络通电之前,在正常运行模式下对至少一个电容器进行预充电;以及
22.‑
当至少一个电容器放电且燃气涡轮不可用时,在电力供应网络通电之前,在备用运行模式下对至少一个电容器进行预充电;以及
23.‑
当至少一个电容器被充电时,在电力供应网络的使用结束时,使至少一个电容器放电。
24.有利地,在正常运行模式下,对至少一个电容器进行预充电的步骤通过使燃气涡轮旋转来执行,直到发电机的电压达到预定阈值电压,然后涡轮处于额定运行。
25.根据一个关注的实施例,对至少一个电容器进行预充电是通过整流器的二极管桥来执行
26.因此,使用已存在于网络上的元件来完成预充电,而不需要专用电路。
27.优选地且有利地,当至少一个电容器被预充电时,电力供应网络通电。
28.优选地且有利地,当通电时,配电总线的电压调整到至少一个电力存储装置的空载电压,以避免产生循环电流峰值。
29.有利地,在备用运行模式下,对至少一个电容器进行预充电的步骤通过改变至少一个电动机的电动势以及通过控制相关联的逆变器以将电动机的动能转换成电能来执行。
30.有利地,放电步骤通过借助于电力供应网络的阻抗耗散至少一个电容器的电能来执行。
31.根据一个示例实现方式,耗散至少一个电容器的电能是通过经转换器的控制,使至少一个发电机和至少一个电动机的定子电阻串联来获得。
32.优选地且有利地,在备用运行模式下,对至少一个电容器进行预充电的步骤包括
断开至少一个电力存储装置的连接的初步步骤。如果在缓冲存储装置(即电池)和电容器之间存在降压/升压型可控直流/直流(dc/dc)转换器,则还可控制电流注入,即电容器(未示出)的端子上的电压上升,这同样确保hvdc总线预充电功能。
33.根据本发明的控制方法使得能够独立地确保如下功能:
34.‑
在网络初始通电之前,利用燃气涡轮的旋转在正常运行模式下对电容器进行预充电;
35.‑
在网络的使用结束时使电容器放电,利用网络的阻抗来耗散电容器中存储的能量,以确保网络安全和对网络进行干预的人员安全;
36.‑
在飞行过程中,利用由电动机的转子的旋转引起的惯性动能,在网络重新配置之后对电容器进行预充电。
37.因此,根据本发明的控制方法使得飞行器自身能够免除电容器的专用预充电和放电电路,以减小飞行器的机载质量并提高飞行器的空气动力学效率,同时确保作为飞行器正确操作的先决条件或出于安全原因所需的充电和放电功能。
附图说明
38.本发明的其它特点和优点将从下面参考附图来理解的详细描述中变得显而易见,在附图中:
39.[图1]先前讨论的图1示出了hvdc电网络的示例,hvdc电网络包括连接到配电总线的多个电负载;
[0040]
[图2]已经讨论的图2示出了根据现有技术的hvdc电网络,hvdc电网络包括预充电电路和放电电路;
[0041]
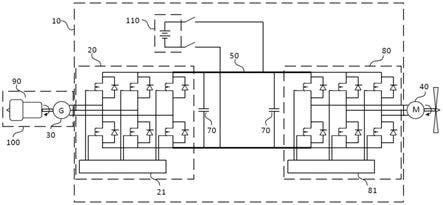
[图3]图3示出了没有专用预充电或放电电路的hvdc电网络;
[0042]
[图4a]图4a是示出飞行器涡轮机的旋转的爬升速度曲线的时间图;
[0043]
[图4b]图4b是示出整流器的输出电压的演变的时间图;
[0044]
[图5]图5示出了在正常运行模式下,在预充电步骤期间电能从发电机传输到hvdc网络的电容器;
[0045]
[图6]图6示出了在电容器放电步骤之前,由hvdc网络的配电总线看到的来源和阻抗的性质;
[0046]
[图7]图7示出了在电容器放电步骤期间,电容能量传输到hvdc网络的定子电阻;
[0047]
[图8]图8示出了在备用运行模式下的预充电步骤。
具体实施方式
[0048]
图3示出了飞行器的hvdc电网络10,hvdc电网络10包括:
[0049]
‑
飞行器的涡轮
‑
交流发电机100的发电机30,适于从燃气涡轮90提供电能量源,并包括与包括控制装置21的有源整流器20相关联的至少一个定子。
[0050]
‑
至少一个配电总线50,包括多个电容器70(至少一个电容器用于连接到配电总线50的每个功率转换器);
[0051]
‑
至少一个待供电电动机40,驱动例如螺旋桨或旋翼以确保飞行器的推进,并与包括控制装置81的逆变器80相关联;以及
[0052]
‑
至少一个能量存储装置110,其可以是电池、超级电容等。
[0053]
根据本发明的控制方法包括如下步骤:
[0054]
‑
当电容器70放电且燃气涡轮可用时,在电力供应网络10通电之前,在正常运行模式下对电容器70进行预充电;
[0055]
‑
当电容器70放电且燃气涡轮不可用时,在电力供应网络10通电之前,在备用运行模式下对电容器70进行预充电;以及
[0056]
‑
当电容器70被充电时,在电力供应网络10的使用结束时,使电容器70放电。
[0057]
更具体地,参考图4a至图5,对于在正常运行模式下对电容器70进行预充电的步骤,最初是使电容器70放电,燃气涡轮关闭,且没有连接电存储装置。通过启动燃气涡轮和使燃气涡轮旋转来执行对电容器70的预充电。
[0058]
因此,如图4a所示,燃气涡轮的转速(用v表示)在启动期间逐渐增加,直到达到额定速度v
tn
。该初始爬升速度阶段具有大约几十秒的持续时间(用t表示)。
[0059]
由于燃气涡轮的输出轴直接连接到发电机30的转子,因此发电机30的转速与燃气涡轮的转速成比例。根据示例实现方式,可以在燃气涡轮和发电机30之间设置减速级。
[0060]
在对应于燃气涡轮的启动的第一运行阶段,有源整流器20不受控制且作为二极管整流器(无源)运行,整流器20的输出电压与发电机30的转子的转速相关联,特别是在发电机30具有磁体类型的同步电机的情况下,整流器20的输出电压与发电机30的转子的转速成比例。
[0061]
图4b示出了在对应于燃气涡轮的启动的第一阶段期间整流器20的输出电压(用t表示)增加,直到达到阈值t
rs
。在减速齿轮箱20的电压上升的第一阶段期间,配电总线50的电压(由整流器20的反向并联二极管对通过发电机30的定子相位提供的交变电压进行无源整流而产生)不足以使得能够直接控制配电总线的电压。
[0062]
当由整流器提供的电压达到阈值电压t
rs
时,有源整流器(升压)式的整流器20的控制装置21可用于调节配电总线50的电压。
[0063]
在第二运行阶段,整流器20的输出电压由控制装置21控制且独立于燃气涡轮的速度,然后作为有源整流器被驱动的整流器20使得能够对配电总线50的电容器70再充电,直到其额定电压t
nm
(如图5中的箭头所示)。
[0064]
当电力网络10通电时,建议将配电总线50的电压t
nm
调整到电力存储装置的空载电压或者连接到配电总线50的电力存储装置110的空载电压,以避免产生循环电流峰值。
[0065]
当电力网络10不使用时,燃气涡轮90不再转动,发电机30关闭,电力存储部件110与配电总线50隔离,使得电力网络10的电压调整到由电容器70施加的电压。断开电池,以使电容器能够放电。特别地,存储在电池中的能量比存储在电容器中的能量大,例如大1000倍。
[0066]
参考图6,电容器70变成高压能量源s。在没有能量消耗系统连接到配电总线50的情况下,存储在电容器70中的静电能量只能通过电容器70的自放电、通过焦耳效应释放。然而,因为电容器70设计成具有尽可能小的损耗:从几分钟到几小时,因此这种自放电现象非常缓慢。因此,在与配电总线50连接的所有电气系统(整流器20、逆变器80和存储装置110)关闭之后的很长时间内,配电总线50上可能仍保持高残余电压。然而,在对电力网络10进行干预期间,例如为了维护,配电总线50的电压必须低于预定阈值,换句话说,配电总线50的
静电能量水平必须低于预定阈值以确保操作者安全。
[0067]
仍然参考图6,在根据本发明的方法的放电步骤期间,发电机30和电动机40变成适于通过焦耳效应来耗散存储在电容器70中的能量的电阻r。因此,图7中的箭头示出了该放电步骤期间的电流循环,即电容能量从电容器70传输到定子电阻r(发电机30和电动机40)。
[0068]
整流器20和逆变器80在它们各自的控制装置21、81中集成了专用于电容器放电的特定控制模式。从宏观的角度来看,这等同于将多个rl型电路串联,一个电路对应于电机30或40的定子相位。
[0069]
可采用两种解决方案以确保放电:
[0070]
‑
第一种解决方案是使第一半导体称为逆变器的“顶部”导电,例如连接到相位1的半导体导电,和使第二半导体称为“底部”导电,以确保电连续性,例如连接到相位2或3的半导体导电;
[0071]
‑
第二种解决方案是使用逆变器的电流控制将电流注入电机,电流值足够低而不能确保转子旋转。这种电流注入方式使得能够足够快地放电,直到电压太低而不能确保逆变器的可控性。
[0072]
在此之前,如果能量存储装置110连接到电力网络10,则在电容器70放电的这个步骤之前应使它们断开连接。
[0073]
对配电总线50的电压进行测量,提供与电容器70的电荷状态相关的信息。例如,当电容器70的电压低于安全进行人为干预的预定阈值时,整流器20的控制装置21和逆变器80的控制装置81分别通过使转换器20、80保持在阻断状态来控制放电步骤停止。
[0074]
在备用运行模式下,例如在能量源20
‑
30断开之后(例如,在电源故障的情况下(燃气涡轮停机或速度非常慢,由于过热的危险而使发电机30关机等)),通过将电动机40和被驱动的负载(例如旋翼或螺旋桨)的动能转换成电能来执行对电容器70进行预充电的步骤。该步骤如图8所示。因此,包括发电机30和整流器40的模块不可用,而包括电容器70和配电总线50的模块需要保持电压。
[0075]
当电动机40一直旋转时,在转子中动能总是可用。
[0076]
逆变器80在结构上类似于有源整流器,因此流经该逆变器80的电流是双向的。因此,具有动能的逆变器80
‑
电动机40组件用于将其一部分动能转换成电能并保持配电总线的电压,换句话说,保持电容器70的电荷水平。为此目的,逆变器80的控制装置81可引入去磁或给电动机40的转子施加减速,以改变电动机40的电动势,从而如图8中的箭头所示将电能传输到配电总线50上,并保持电容器70的能量电荷水平。
[0077]
在该备用运行阶段,可用的能量非常少,因此,为了保持电容器70的电荷,需要调整连接到电力网络10的其它负载所消耗的功率。
[0078]
根据本发明的控制方法可在所有类型的hvdc网络中实现,此类hvdc网络包括一个或多个涡轮发电机(与发电机相关联的涡轮)、一个或多个整流器,以及例如还存在或不存在电力存储装置,它们并联地安装在配电总线50上。