1.本发明涉及轨道交通车辆领域,具体涉及一种轨道车辆运行状态识别方法及系统。
背景技术:
2.轨道车辆在运行过程中,对车辆的运行状态进行实时监控是保证车辆运行安全和提高旅客乘坐舒适性的一种重要技术手段。国内高速动车组高速运行时,影响车辆运行安全和旅客舒适性的因素主要来自轮轨接触关系和悬挂部件性能。当轮轨匹配的等效锥度过低时,转向架蛇行运动会激发车体悬挂模态,动车组车体表现为明显的低频晃动;当轮轨匹配的等效锥度过高时,转向架蛇行运动会激发车体低阶弹性模态,动车组车体表现为明显的抖动;当抗蛇行减振器故障时,尤其是在车轮或钢轨磨耗后,易出现转向架蛇行失稳;当车辆其他悬挂部件故障时,车体运行平稳性指标明显增大。一旦车辆出现上述任一种状态,车辆运行安全和旅客舒适性都无法得到保证。因此,如何识别轨道车辆运行状态显得极为迫切。
技术实现要素:
3.本发明的目的是提供一种轨道车辆运行状态识别方法,该方法可以高效地利用既有车载设备进行运行状态的识别,提高车辆运行安全和旅客舒适性;本发明的另一目的是提供一种轨道车辆运行状态识别系统。
4.一种轨道车辆运行状态识别方法,该方法由以下步骤实现:
5.步骤一、采用加速度传感系统采集车体前端和后端两处的横向和垂向振动加速度数据,在t时刻的实时采样数据分别为:车体前端垂向加速度数据a
fz
(t)、车体前端横向加速度数据a
fy
(t)、车体后端垂向加速度数据a
rz
(t)以及车体后端横向加速度数据a
ry
(t);f和r分别为车体前端和后端测点位置,z和y分别为垂向和横向,并对实时采样数据进行预处理,获得预处理后的数据;具体过程为:
6.步骤一一、每间隔1秒进行一次数据处理,实现t-5时刻至t时刻之间长度为5秒的加速度数据,分别为:a
fz_5s
、a
fy_5s
、a
rz_5s
和a
ry_5s
;
7.步骤一二、采用第一带通滤波器对步骤一获得的加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
和a
ry_5s
进行滤波,得到滤波后的加速度数据为a
fz_5s_bp1
、a
fy_5s_bp1
、a
rz_5s_bp1
和a
ry_5s_bp1
;
8.采用第二带通滤波器对步骤一获得的加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
和a
ry_5s
进行滤波,获得滤波后的加速度数据为a
fz_5s_bp2
、a
fy_5s_bp2
、a
rz_5s_bp2
和a
ry_5s_bp2
;
9.采用第三带通滤波器对步骤一获得的加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
和a
ry_5s
进行滤波,获得滤波后的加速度数据为a
fz_5s_bp3
、a
fy_5s_bp3
、a
rz_5s_bp3
和a
ry_5s_bp3
;
10.步骤一三、分别对步骤一二中采用第一带通滤波器、第二带通滤波器以及第三带通滤波器滤波后的加速度数据计算加速度均方根,获得均方根值分别为:rms
fz_bp1
、rms
fy_bp1
、rms
rz_bp1
和rms
ry_bp1
;rms
fz_bp2
、rms
fy_bp2
、rms
rz_bp2
和rms
ry_bp2
以及rms
fz_bp3
、rms
fy_bp3
、
rms
rz_bp3
和rms
ry_bp3
;
11.步骤二、采用平稳性指标计算方法对步骤一一获得的加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
和a
ry_5s
进行分析,获得车体前端和后端的平稳性指标,分别为:w
fz
、w
fy
、w
rz
和w
ry
;
12.步骤三、将所述车辆运行状态分为车辆晃动、车辆抖动、车辆抗蛇行减振器故障、车辆其他悬挂部件故障、车辆正常五个类别,并根据步骤一的预处理数据和步骤二的平稳性指标对各个类别进行判断,获得车辆的运行状态;
13.根据步骤一的预处理结果及步骤二的平稳指标,判断车辆的运行状态;
14.所述车辆晃动的判断依据为:当rms
fy_bp1
和rms
ry_bp1
任一处连续10次超过0.03g,g=9.81m/s2,同时w
fy
和w
ry
均连续10次超过3.0;
15.所述车辆抖动的判断依据为:当rms
fz_bp3
、rms
fy_bp3
、rms
rz_bp3
和rms
ry_bp3
任一处连续10次超过0.02g,同时w
fy
和w
ry
均连续10次超过2.75;
16.所述辆抗蛇行减振器故障的判断依据为:当rms
fz_bp2
、rms
fy_bp2
、rms
rz_bp2
和rms
ry_bp2
任一处连续10次超过0.02g,同时w
fz
、w
fy
、w
rz
和w
ry
任一处连续10次超过2.5;
17.所述车辆其他悬挂部件故障的判断依据为:当rms
fz_bp1
、rms
fy_bp1
、rms
rz_bp1
和rms
ry_bp1
均连续10次不超过0.03g,同时rms
fz_bp2
、rms
fy_bp2
、rms
rz_bp2
和rms
ry_bp2
均连续10次不超过0.02g,同时rms
fz_bp3
、rms
fy_bp3
、rms
rz_bp3
和rms
ry_bp3
均连续10次不超过0.02g,同时w
fz
、w
fy
、w
rz
和w
ry
均连续10次超过3.0;
18.如果均不满足所述车辆晃动、车辆抖动、车辆抗蛇行减振器故障以及车辆其他悬挂部件故障的判断时,则车辆运行状态正常。
19.一种轨道车辆运行状态识别系统,该系统包括设置在车体上的加速度传感系统和与所述加速度传感系统连接的状态识别单元;
20.所述加速度传感系统用于采集车体前端和后端两处的横向和垂向振动加速度;
21.所述状态识别单元用于接收所述加速度传感系统采集的车体振动数据并进行处理分析,实现车体运行状态的识别。
22.本发明的有益效果:轨道车辆运行状态识别系统通过加速度传感系统实时采集车体振动数据,结合状态识别处理单元对车辆运行状态进行实时处理,并将识别结果通过网络通讯模块传输到司机室监控中心和远程监控中心,进一步保证车辆运行安全和提高旅客舒适性。
附图说明
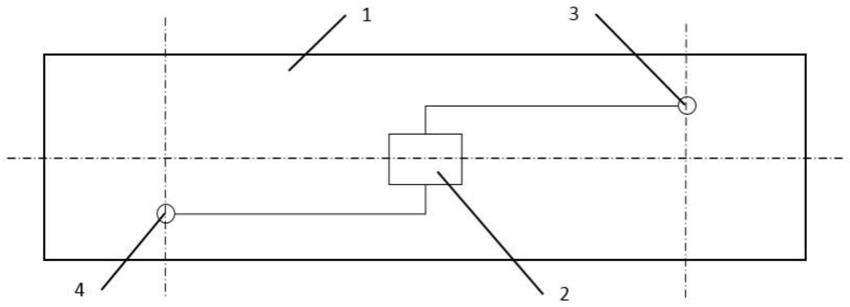
23.图1为本发明所述的轨道车辆运行状态识别系统的结构示意图。
24.图2为本发明所述的轨道车辆运行状态识别系统的原理框图。
25.图3为本发明所述的轨道车辆运行状态识别方法的流程示意图。
26.图中:1-车体;2-状态识别处理单元;3-车体前加速度传感器;4-车体后加速度传感器。
具体实施方式
27.具体实施方式一、结合图1和图2说明本实施方式,轨道车辆运行状态识别系统,包括:
28.加速度传感系统,设置在车体1上,包括前加速度传感器3、后加速度传感器4,所述前加速度传感器3和后加速度传感器4分别对角布置在前、后转向架中心偏向车体1一侧1000mm的车内地板上,用于采集车体1前、后端两处的横向和垂向振动加速度;
29.状态识别处理单元2,与加速度传感系统连接,用于接收加速度传感系统采集的车体振动数据并按照车辆运行状态识别方法进行处理分析;状态识别处理单元2包括用于对车体振动数据进行分析运算的中央计算模块、用于存储相关数据的存储模块、以及用于实现数据传输的网络通讯模块;中央计算模块分别连接网络通讯模块和存储模块;中央计算模块通过网络通讯模块与外界上位机进行数据传输,中央计算模块、存储模块、网络通讯模块均布置在电路板上,存储模块可将中央计算模块处理好的结果进行存储,网络通讯模块可将中央计算模块处理好的信息转换为符合传输协议格式的内容进行传输。
30.本实施方式中,所述中央计算模块为可编程逻辑控制器,中央计算模块与网络通讯模块按照串行通讯方式连接;网络通讯模块设有网络连接端口和wifi端口;存储模块至少用于存储轨道车辆运行数据及相应的分析运算结果。
31.所述外界上位机包括司机室监控中心和远程监控中心,也就是说,司机可通过司机室监控中心查看车辆运行状态,远程技术人员可通过远程监控中心查看车辆运行状态。
32.具体实施方式二、结合图3说明本实施方式,轨道车辆运行状态识别系统的状态识别方法,该方法通过具体实施方式一所述的轨道车辆运行状态识别系统的状态识别系统实现,包括以下步骤:
33.步骤1,通过加速度传感系统采集车体前、后端两处的横向和垂向振动加速度a
fz
(t)、a
fy
(t)、a
rz
(t)、a
ry
(t),f和r分别表示车体前、后端测点位置,z和y分别表示垂向和横向,t表示实时采样时刻,采样频率要求在100hz以上;
34.步骤2,对步骤1得到的实时数据进行预处理;
35.(1)所述的实时数据预处理包括:
36.(2)每间隔1秒进行1次数据处理,处理t-5时刻至t时刻之间长度为5秒的加速度数据,也就是数据处理窗的大小为5秒,窗的滑移为1秒,定义该加速度数据为a
fz_5s
、a
fy_5s
、a
rz_5s
、a
ry_5s
;
37.(3)利用0.5~2.5hz带通滤波器1对加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
、a
ry_5s
进行滤波,得到滤波后的加速度数据为a
fz_5s_bp1
、a
fy_5s_bp1
、a
rz_5s_bp1
、a
ry_5s_bp1
;
38.(4)利用2.5~6hz带通滤波器2对加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
、a
ry_5s
进行滤波,得到滤波后的加速度数据为a
fz_5s_bp2
、a
fy_5s_bp2
、a
rz_5s_bp2
、a
ry_5s_bp2
;
39.(5)利用6~10hz带通滤波器3对加速度数据a
fz_5s
、a
fy_5s
、a
rz_5s
、a
ry_5s
进行滤波,得到滤波后的加速度数据为a
fz_5s_bp3
、a
fy_5s_bp3
、a
rz_5s_bp3
、a
ry_5s_bp3
;
40.(6)以a
fz_5s_bp1
、a
fy_5s_bp1
、a
rz_5s_bp1
、a
ry_5s_bp1
为分析对象,分别计算加速度均方根,定义为rms
fz_bp1
、rms
fy_bp1
、rms
rz_bp1
、rms
ry_bp1
;
41.(7)以a
fz_5s_bp2
、a
fy_5s_bp2
、a
rz_5s_bp2
、a
ry_5s_bp2
为分析对象,分别计算加速度均方根,定义为rms
fz_bp2
、rms
fy_bp2
、rms
rz_bp2
、rms
ry_bp2
;
42.(8)以a
fz_5s_bp3
、a
fy_5s_bp3
、a
rz_5s_bp3
、a
ry_5s_bp3
为分析对象,分别计算加速度均方根,定义为rms
fz_bp3
、rms
fy_bp3
、rms
rz_bp3
、rms
ry_bp3
;
43.(9)根据gb5599-2019规定的平稳性指标计算方法对加速度数据a
fz_5s
、a
fy_5s
、arz_5s
、a
ry_5s
进行分析,得到车体前、后端的平稳性指标,定义为w
fz
、w
fy
、w
rz
、w
ry
;
44.步骤3,基于步骤2得到的预处理结果,依据预先设置的判断逻辑识别车辆运行状态,将所述车辆运行状态分为车辆晃动、车辆抖动、车辆抗蛇行减振器故障、车辆其他悬挂部件故障、车辆正常等五类;
45.(10)根据步骤2计算得到的结果,若rms
fy_bp1
、rms
ry_bp1
任一处连续10次超过0.03g(g=9.81m/s2),同时w
fy
、w
ry
均连续10次超过3.0,识别为车辆晃动状态;
46.(11)根据步骤2计算得到的结果,若rms
fz_bp3
、rms
fy_bp3
、rms
rz_bp3
、rms
ry_bp3
任一处连续10次超过0.02g,同时w
fy
、w
ry
均连续10次超过2.75,识别为车辆抖动状态;
47.(12)根据步骤2计算得到的结果,若rms
fz_bp2
、rms
fy_bp2
、rms
rz_bp2
、rms
ry_bp2
任一处连续10次超过0.02g,同时w
fz
、w
fy
、w
rz
、w
ry
任一处连续10次超过2.5,识别为车辆抗蛇行减振器故障状态;
48.(13)根据步骤2计算得到的结果,若rms
fz_bp1
、rms
fy_bp1
、rms
rz_bp1
、rms
ry_bp1
均连续10次不超过0.03g,同时rms
fz_bp2
、rms
fy_bp2
、rms
rz_bp2
、rms
ry_bp2
均连续10次不超过0.02g,同时rms
fz_bp3
、rms
fy_bp3
、rms
rz_bp3
、rms
ry_bp3
均连续10次不超过0.02g,同时w
fz
、w
fy
、w
rz
、w
ry
均连续10次超过3.0,识别为车辆其他悬挂部件故障状态;
49.(14)根据步骤2计算得到的结果,若均不满足上述车辆晃动、车辆抖动、车辆抗蛇行减振器故障、车辆其他悬挂部件故障等状态的判断,识别为车辆正常状态。
50.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
51.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。