1.本发明涉及轨道交通领域,特别是一种虚拟轨道列车及其辅助驾驶方法、系统。
背景技术:
2.大中城市的公共交通拥堵状况已严重的影响着我国城市的健康发展,即使是在二、三线城市的公共交通状况也不容乐观。坚持公共交通优先发展,建立以快速轨道交通为骨干、道路公交为主体、出租车为补充的多层次一体化的公共客运交通体系已成为当前城市公共交通发展的主流。以地铁和轻轨为主的轨道交通线网,其建设周期长,成本巨大,无法覆盖大中城市所有区域,二、三线城市无力承担其建设费用。因此,构建一种大运量、低成本、智能化的公共交通系统是解决部分城市公共交通拥堵问题的首选。有轨电车与无轨电车是解决城市路面公共交通的两种重要交通工具,近年来,现代有轨电车与无轨电车从过去的高地板过渡到100%低地板,由过去的单一编组逐步过渡到超长灵活编组。此外,从车辆技术的发展趋势来看“绿色”“智能”是未来交通工具的主流发展趋。
3.超级虚拟轨道列车采用四辆编组,其长度超过30米,已不满足目前的道路交通车辆标准要求,因此其运行线路通常为封闭式专用道路,或者专用/优先道路,以及少量交叉路口。由于超级虚拟轨道列车车辆的特殊性,其尾部侧面等位置驾驶员无法仅凭视觉观察来判定障碍物或者危险,且由驾驶员来控制车辆转向与加减速已很难满足车辆的操控需求,因此需要一种实时感知外部环境,控制车辆自动转向与自动加减速的辅助驾驶系统。
4.现有技术的方法只对单辆车(即单节车辆)进行控制,或者只对列车的纵向的牵引和制动进行控制,无法解决超长灵活编组给驾驶员带来的驾驶盲区的问题,也无法解决超级虚拟轨道列车带来的车辆横向控制(横向控制即为车辆各轴轮胎的转向控制)问题。
技术实现要素:
5.本发明所要解决的技术问题是,针对现有技术不足,提供一种虚拟轨道列车及其轨道生成方法、辅助驾驶方法、系统,实现超级虚拟轨道列车的横向控制。
6.为解决上述技术问题,本发明所采用的技术方案是:一种超级虚拟轨道列车的辅助驾驶方法,包括以下步骤:
7.1)采集车道线,生成车道线的俯视图,利用所述俯视图提取车道线上的离散坐标点集(p1,p2,...,pi,...,pn);其中,n为离散坐标点的个数;拟合所述离散坐标点集中的离散坐标点,得到行驶轨迹曲线c(u);利用所述行驶轨迹曲线计算得到虚拟数字轨道的道路曲率信息ρ(uk);
8.根据车辆的最大运行速度v
max
,时间周期δt,计算得到下一周期的行驶目标点的预估距离偏差δl
p
:
9.δl
p
=δt*v
max
;
10.2)根据预估距离偏差δl
p
,计算出预估弧长参数将弧长参数代入道路曲
率信息ρ(uk)的表达式,得到计算下一周期允许的最大速度
[0011][0012]
其中:l为离散坐标点p1至离散坐标点pn的行驶轨迹总弧长;
[0013]
3)比较车辆的最大运行速度v
max
以及道路曲率允许的最大速度,计算实际允许的距离偏差δl:
[0014][0015]
4)根据实际允许的距离偏差δl,计算实际的弧长参数将实际弧长参数代入行驶轨迹曲线c(u)表达式中,得到下一时间周期车辆行驶目标点坐标为:
[0016][0017]
5)根据车辆当前的位置坐标(x0,y0)及下一时间周期车辆行驶目标点坐标(x(t),y(t)),计算得到当前时刻方向盘的转向角增量α:
[0018][0019]
本发明基于图像识别导向,实现自动转向功能,解决了超级虚拟轨道列车带来的车辆横向控制难的问题。
[0020]
所述行驶轨迹曲线c(u)的表达式为:
[0021][0022]
其中,n
i,p
(u)为p次b样条曲线的基函数;u0=0,um=1;m=n-p+1。
[0023]
由于b样条曲线曲面具有几何不变性、凸包性、保凸性、变差减小性、局部支撑性等许多优良性质,使得通过数学表达式所描述的行驶轨迹曲线能够最大程度接近实际轨迹曲线。
[0024]
p次b样条曲线的基函数n
i,p
(u)的计算公式为:
[0025][0026]
p是曲线的阶数,后续p个u的取值均为1。
[0027]
所述道路曲率信息计算公式为:
[0028]
[0029]
其中,||
·
||为欧式空间范数,κ(uk)和ρ(uk)分别为曲线参数uk下的曲率和曲率半径,c'(uk)和c”(uk)分别为曲线行驶轨迹曲线c(u)的一阶导矢和二阶导矢在uk处的坐标值。
[0030]
本发明的方法还包括:根据所述当前时刻方向盘的转向角数值计算车辆其余各轴的转向角。
[0031]
作为一个发明构思,本发明还提供了一种超级虚拟轨道列车的辅助驾驶系统,包括计算机设备;所述计算机设备被配置或编程为用于执行上述方法的步骤。
[0032]
所述计算机设备与感知模块通信;所述感知模块包括安装于车头、车身以及车尾的多个摄像头。便于采集车道线图像。
[0033]
本发明的所述计算机设备还与传输模块连接;所述传输模块用于将计算机设备输出的控制指令发送至车辆执行机构。
[0034]
1、作为一个发明构思,为便于方向盘转向角的计算,本发明还提供了一种数字虚拟轨道生成方法,利用下式表征车辆在数字虚拟轨道上的行驶轨迹曲线c(u):
[0035][0036]
其中,n
i,p
(u)为p次b样条曲线的基函数;u0=0,um=1;m=n-p+1;(p1,p2,...,pn)为采集车道线,并生成车道线的俯视图,利用所述俯视图提取的车道线上的离散坐标点集;n为离散坐标点的个数,pi为离散坐标点,i=1,2,
……
,n。本发明还提供了一种虚拟轨道列车,其包括上述辅助驾驶系统。
[0037]
与现有技术相比,本发明所具有的有益效果为:
[0038]
1、本发明基于图像识别导向,实现了自动转向功能,解决了超级虚拟轨道列车带来的车辆横向控制难的问题;
[0039]
2、设置多个图像采集装置,解决了超长灵活编组给驾驶员带来的驾驶盲区的问题;
[0040]
3、与传统人工驾驶车辆相比,本发明能实时感知外部环境,控制车辆自动转向,解决了超长灵活编组给驾驶员带来的驾驶盲区的问题,提升了整车智能化及安全水平,提高了整车的舒适度和安全性。
附图说明
[0041]
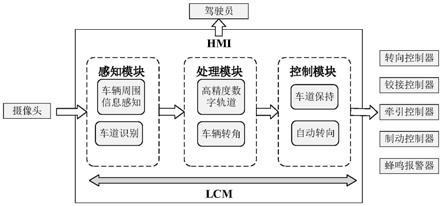
图1为本发明实施例辅助驾驶系统框图;
[0042]
图2为本发明实施例数字虚拟轨道的生成方法流程图;
[0043]
图3为本发明实施例数字虚拟车道曲线图;
[0044]
图4为本发明实施例方向盘转向角的计算方法原理框图;
[0045]
图5为本发明整车转向系统的网络架构图。
具体实施方式
[0046]
本发明实施例针对可灵活编组的超级虚拟轨道列车提出基于图像识别的辅助驾驶系统如图1所示。
[0047]
本发明实施例工作原理是:通过图像识别系统,对车辆前方道路进行识别,同时探测出行车过程中周围的交通环境信息,将这些信息融合后传给中央处理模块。中央处理模
块运行中央处理器内置的图像识别算法以及转向角生成算法,接受来自于传感器层的感知信息,通过行为预测模块、处理模块、运动规划模块、车辆控制模块等控制器内部主要模块,输出到车辆执行器层,形成控制指令。动力控制单元作为底层执行器,直接对车辆执行层(即转向系统,牵引系统,制动系统,报警系统)进行控制。
[0048]
如图1所示,本发明实施例的系统主要通过以下几个功能模块来实现:
[0049]
感知模块通过安装在车头的双目摄像头、车身周围的侧向摄像头以及车尾的双目摄像头(车身前后对称布置)进行环境感知和车道线识别,通过图像辨识准确感知列车在车道中位置。同时由于车辆过长,驾驶员无法仅凭视觉观察来判定其尾部侧面等位置的障碍物或者危险,具有车载图像识别装置的辅助驾驶系统能够及时的辨识,感知车辆周围环境信息。
[0050]
处理模块中,图像识别中央处理器根据感知模块获得的道路信息以及车身周围环境信息生成高精度的数字轨道,然后对比根据车辆当前位置信息以及车道信息与数字轨道对比结果,生成方向盘的转向角,发送给控制模块。
[0051]
数字虚拟轨道的生成方法如图2所示。
[0052]
车头的双目摄像头对车道线进行识别,然后通过图像分割及俯视变换生成车道线的俯视图,对俯视图进行图像算法处理可以提取得到车道线的离散坐标点。图像分割及俯视变换、图像算法处理为现有技术(见:金美玉.基于反透视变换的图像分割方法的研究与软件实现[d].华北电力大学(河北),2008.),处理得到当前车辆视野范围内的行驶轨迹,如图3所示,以超级虚拟轨道第一轴中心为原点,车辆行驶的前进方向为y轴正方向,垂直于车辆前进方向的左侧为x轴正向(y轴正向逆时针旋转90
°
即为x轴正向)建立直角坐标系,曲线c(u)为车辆行驶的轨迹,其中点集(p1,p2,...,pi,...,pn)为图像算法处理得到的车道线上的离散点,其坐标点由图像算法已知,可以表达为:
[0053]
pi=(xi,yi),i=1,...,n
ꢀꢀ
(1)
[0054]
通过使用样条曲线对离散坐标点的拟合,则生成了基于样条曲线的数字虚拟车道,为车辆的行驶提供输入信息(用于方向盘转向角的计算)。其中,使用样条曲线对离散坐标点的拟合使用p次nurbs样条曲线拟合,其具体过程如下所示:
[0055]
一条p次的nurbs曲线的定义如下:
[0056][0057]
其中wi为每个控制点的权重;pi为所有的控制点;n
i,p
(u)为p次b样条的基函数,其定义在非周期(且非均匀)节点向量u上。节点向量为:
[0058][0059]
其中u
n-p+1
=um,并且通常取u0=0,um=1。nurbs曲线的b样条基函数则可以根据节点向量以及递推公式求解,具体为:
[0060][0061]
然后根据控制点的位置和每个控制点上的权重就可以对公式(2)进行求解,如果将公式(2)中的wi值均取为1,则将该类曲线称为b样条曲线,其为nurbs曲线的一直特殊形式。b样条曲线能够灵活的表达复杂的形状轨迹,尤其适用于行驶轨迹曲线的表述。其表达式为
[0062][0063]
x(u),y(u)即为求解曲线上的点的横坐标和纵坐标,其为矢量。
[0064]
根据公式(5)获得的虚拟数字轨道曲线表达式,可以计算得到虚拟数字轨道的道路曲率信息,其计算表达式如(6)所示:
[0065][0066]
其中,||
·
||为欧式空间范数,κ(uk)和ρ(uk)分别对于曲线参数uk下的曲率和曲率半径,c'(uk)和c”(uk)分别为曲线c(u)的一阶和二阶导矢在uk处的坐标值。
[0067]
方向盘转向角的计算原理如图4所示:
[0068]
首先是根据当前车辆速度以及计算的时间周期δt,确定车辆下一个伺服周期的预估行驶距离δl
p
,如图所示:
[0069]
δl
p
=v
×
δt
ꢀꢀ
(7)
[0070]
则预估下个伺服周期的目标点坐标值p
t
(x
t
,y
t
)可以确定为:
[0071]
即
[0072]
其中,曲线参数l为点p1至pn的行驶轨迹总弧长,和为伺服计算目标的横坐标和纵坐标值,u
δl
为当前周期的弧长累计值。
[0073]
然后根据车辆当前的坐标值(x0,y0)以及下一点的坐标值(x
t
,y
t
)可得到数字虚拟轨道及道路信息得到的道路曲率信息,计算出当前周期的距离偏差、角度偏差,通过图像识别中央处理器实时计算得到当前方向盘的转向角数值增量,用于车辆的横向控制。
[0074]
其中,道路曲率信息用于计算当前运动周期内道路允许车辆行驶的最大速度,计算公式为:
[0075]
[0076]
需要保证车辆速度防止车辆出现侧滑等。因此纵向控制的运行速度为:
[0077][0078]
其中,v
max
为当前行驶轨迹路面限速。
[0079]
通过对车辆的最大运行速度v
max
以及道路曲率允许的最大速度进行比较,计算出实际上允许的距离偏差:
[0080]
δl=δt*v
ꢀꢀ
(11)
[0081]
则根据距离偏差,计算实际的弧长参数结合行驶轨迹曲线c(u),可以计算得到下一时间周期车辆行驶目标点坐标为:
[0082][0083]
然后根据车辆当前的位置坐标(x0,y0),及下一时间周期车辆行驶目标点坐标(x(t),y(t)),计算得到当前时刻方向盘的转向角增量α:
[0084][0085]
本发明对于双向驱动行驶的超级虚拟轨道列车有着很好的适用性,能够实时感知外部环境,控制车辆自动转向。
[0086]
以下具体阐述本发明实施例方案实现的功能。
[0087]
目前超级虚拟轨道列车转向系统的网络架构如图5所示,a、f轴为动力轴,采用电液助力转向;b、c、d、e轴为非动力轴,采用液压助力转向,六根轴均具备独立的主动转向控制。当驾驶员操作a轴方向盘时后面所有轴跟随转向。每个车厢都有独立的转向控制器,通过控制网络与整车的转向控制器相连,整车转向控制器与整车控制器通过控制网络相连。
[0088]
驾驶员在汽车行驶过程中,可通过人机交互界面选择辅助驾驶模式,辅助驾驶系统通过安装在车头的双目摄像头、车身周围的侧向摄像头以及车尾的双目摄像头(车身前后对称布置)进行环境感知和车道线识别。处理模块中,图像识别中央处理器根据感知模块获得的道路信息以及车身周围环境信息生成高精度的数字轨道,然后对比根据车辆当前位置信息以及车道信息与数字轨道对比结果,生成方向盘的转向角,通过控制网络传输给转向主控单元,然后转向主控单元根据转向角输入计算其他各轴转向角,发送给控制单元来实现车辆的自动转向。
[0089]
本发明中驾驶员可通过加装平板电脑进行人机交互,驾驶员所需看到、听到的信息以及针对辅助驾驶方面的操作均从加装的平板电脑屏幕上获取,包括:
[0090]
(1)地图信息(车辆在地图中的整体位置信息);
[0091]
(2)车辆周边环境信息(显示仿真车辆,仿真本车辆、各车道线、周边车辆及物体等);
[0092]
(3)车辆行驶信息(如辅助驾驶状态、设定车速、当前车速、转向角度);
[0093]
(4)显示报警提醒、请求人工接管信息,包括图形闪烁和声音两种方式;
[0094]
(5)驾驶员在人机交互显示屏上进行操作(包括启动或关闭辅助驾驶,选择模式,
设定车速等)。
[0095]
本发明的超级虚拟轨道列车辅助驾驶方案不仅适用于轨道电车也使用于无轨电车,其可以灵活编组(单节或者多节车厢),根据编组情况来灵活调整辅助驾驶方案,调整卫星导航天线及传感器的布置等。