一种agv输料系统
技术领域
1.本实用新型涉及输送设备技术领域,尤其涉及一种agv输料系统。
背景技术:
2.agv,全称为automated guided vehicle,通常也被称为agv小车,指的是装备有电磁或光学等自动导航装置,并能够沿规定的导航路径进行行驶,且具有安全保护以及各种移载功能的运输车。工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源。
3.根据使用情况,agv小车需要间隔一定的周期进行充电,以免影响其正常工作。一般情况下,企业会设置固定的充电点位。在需要充电时,将agv小车暂停工作,进行定点充电,不仅影响工作效率,同时也存在漏充电的可能,使得agv小车可能在行进过程中突然中止工作,势必会影响工作的正常运转。
4.此外,agv小车也存在不规律使用的情况,那么充电周期就是不确定的,这时就需要重新计算agv小车的工作时长来确定充电时间,比较麻烦。
技术实现要素:
5.本实用新型的一个优势在于提供一种agv输料系统,通过在agv小车的上料工位或下料工位设置自动充电桩,使得agv小车能够在上料或下料的同时进行自动充电,充电更加快捷、方便,避免了充电停工的情况,极大的减小了人为漏充电的可能,且不需要重新确定充电时间。
6.本实用新型的一个优势在于提供一种agv输料系统,根据储能机构所储存电能的情况对agv小车进行按需充电,自动化程度高,工作效率更高。
7.本实用新型的一个优势在于提供一种agv输料系统,通过在上料工位和下料工位同时设置自动充电桩,能够有效增加agv小车的充电点位,便于agv小车在上料或下料的时候的即时充电,进一步确保了agv小车能够正常工作。
8.本实用新型的一个优势在于提供一种agv输料系统,通过差速电机提供驱动动力能够有效提升agv小车的爬坡载重能力,更加节能环保。
9.本实用新型的一个优势在于提供一种agv输料系统,通过设置避障组件能够使agv 小车的运行更加安全,确保高效的工作效率。
10.本实用新型的一个优势在于提供一种agv输料系统,通过设置磁导航感应装置和地标传感器,能够使agv小车稳定运行在车间的厂房和上下料工位之间,并可以识别线路上rfid卡等信号指标。
11.本实用新型的一个优势在于提供一种agv输料系统,通过设置安全传感器和机械防撞条能够有效保护agv小车,提高其使用寿命,降低成本。
12.为达到本实用新型以上至少一个优势,本实用新型提供一种agv输料系统,其中所述agv输料系统包括:
13.一agv小车,其中所述agv小车包括车体和被设置于所述车体的储能机构,所述车
体还安装有第一感应装置;
14.一控制装置,其中所述控制装置与所述储能机构以及所述第一感应装置同时电连接;和
15.至少一自动充电桩,其中所述自动充电桩被设置于所述agv小车的上料工位或下料工位,且所述自动充电桩设置有第二感应装置和自动充电臂,其中所述第二感应装置与所述第一感应装置相配合,所述自动充电臂与所述储能机构相配合,以在所述储能机构的电能低于预定水平时,所述第一感应装置能够被控制自动打开,并在所述第二感应装置感应到所述第一感应装置后,所述自动充电臂能够与所述储能机构电连接,以提供充电。
16.根据本实用新型一实施例,所述自动充电桩被设置为至少两个,其中任意两个所述自动充电桩分别被设置于所述agv小车的上料工位和下料工位。
17.根据本实用新型一实施例,所述agv小车还包括被设置于所述车体的动力组件,其中所述动力组件包括驱动轮、随动轮和驱动元件,其中所述驱动轮与所述驱动元件电连接,所述驱动元件同时与所述储能机构和所述控制装置电连接。
18.根据本实用新型一实施例,所述驱动元件被实施为差速电机,其中所述差速电机由电机和滑差离合器组成。
19.根据本实用新型一实施例,所述agv小车还包括被设置于所述车体的避障组件,其中所述避障组件包括至少一避障传感器,其中所述避障传感器与所述控制装置电连接,且所述避障传感器靠近所述车体的前端。
20.根据本实用新型一实施例,所述避障传感器被实施为激光传感器和超声传感器的组合。
21.根据本实用新型一实施例,所述避障组件包括至少四个所述避障传感器,且至少四个所述避障传感器分别被设置于所述车体的前端、后端以及两侧。
22.根据本实用新型一实施例,所述agv小车还包括被设置于所述车体的底部的磁导航感应装置,其中所述磁导航感应装置与所述控制装置电连接,以识别一磁导轨而能够随所述磁导轨定向移动。
23.根据本实用新型一实施例,所述agv小车还包括被设置于所述车体的地标传感器。
24.根据本实用新型一实施例,所述agv小车还包括被设置于所述车体的安全传感器以及被设置于所述车体的外侧壁的机械防撞条,其中所述安全传感器与所述控制装置电连接。
25.本实用新型的这些和其它目的、特点和优势,通过下述的详细说明,得以充分体现。
附图说明
26.图1示出了本技术中agv小车的俯视结构示意图。
27.图2示出了本技术中agv小车的仰视结构示意图。
28.图3示出了本技术中动力组件的局部结构示意图。
具体实施方式
29.以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的
变型。在以下描述中界定的本实用新型的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本实用新型的精神和范围的其他技术方案。
30.本领域技术人员应理解的是,在说明书的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本实用新型的限制。
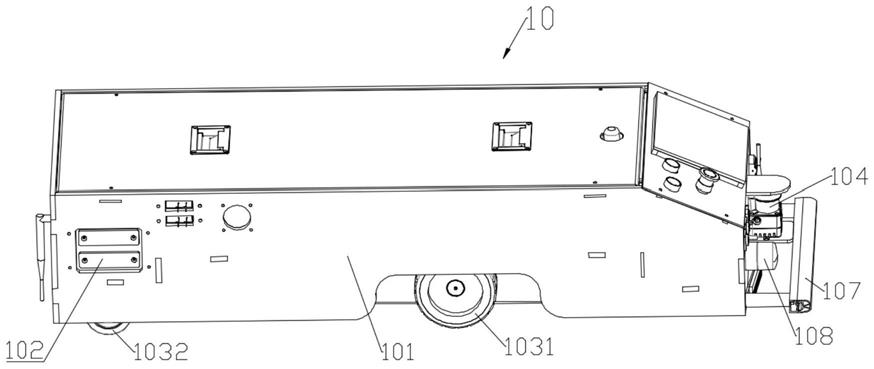
31.参考图1至图3,依本实用新型一较佳实施例的一种agv输料系统将在以下被详细地阐述,其中所述agv输料系统包括一agv小车10、一控制装置和至少一自动充电桩(图中未显示),其中所述agv小车10包括车体101和被设置于所述车体101的储能机构 102。通过所述储能机构102储存供所述agv小车10运行的电能。所述车体101还安装有第一感应装置,比如光电感应器。
32.所述控制装置与所述储能机构102以及所述第一感应装置同时电连接。通过所述控制装置监控所述储能机构102所储存电能的情况,并根据所储存电能的情况判断是否需要开启所述第一感应装置。也就是说所述第一感应装置处于常闭状态,只有在特定条件下才会触发所述控制装置来控制所述第一感应装置自动开启。
33.所述自动充电桩被设置于所述agv小车10的上料工位或下料工位,且所述自动充电桩设置有第二感应装置和自动充电臂,其中所述第二感应装置与所述第一感应装置相配合,所述自动充电臂与所述储能机构相配合。
34.在所述agv小车10正常工作的过程中,所述控制装置实时监控所述储能机构102 的含电量,一旦所述储能机构102的含电量低于预定水平,所述控制装置就会控制所述第一感应装置自动打开,使其能够向外界发送信号,而当所述agv小车10行走至所述上料工位或所述下料工位时,所述第二感应装置感应到所述第一感应装置发出的感应信号后,利用机器人技术,所述自动充电臂与所述储能机构102电连接,以向所述储能机构102提供自动充电服务。
35.以此,利用所述agv小车10上料或下料的时间,通过所述自动充电桩对所述agv 小车10进行自动充电,不仅充电方便,还不影响所述agv小车10的运行,能够有效提升工作效率。另外,在所述agv小车10的所述储能机构102内的电能较为充裕时,为保护所述储能机构102,该agv小车输料系统还通过所述控制装置实时监控所述储能机构102的含电量,只有在低于预定水平时才会控制所述第一感应装置自动打开,以使其能够被所述第二感应装置感应到。也就是说,只有所述储能机构102在含电量较低时,才会开启该自动充电服务,从而能够有效保护所述储能机构102,避免其频繁的充放电而影响使用寿命。
36.显然,所述储能机构102被监测到的预定水平所含有的电量,不仅满足所述agv小车到达所述上料工位或所述下料工位的双倍行程的使用,以免仅在所述上料工位设置所述自动充电桩,而所述agv小车10在下料过程中出现电量不充裕的情况发生,此时,所述agv小车势必需要在下料完毕后,继续行走至所述上料工位,才能进行充电;另外,所述预定水平的含电量还应具有一定的富余量,以免所述agv小车10在途中出现绕行或其他问题而消耗过多电能。
37.该agv输料系统不仅能够在上料或下料的过程中实现给所述agv小车10的自动充
电,节约充电时间,还可以避免人为漏充电的可能,同时省去了牢记充电周期或者重新计算充电时间的麻烦。
38.另外,考虑到一些特殊情况的发生,比如所述控制装置出现问题而不能及时监控所述储能机构102的含电量情况,一旦所述agv小车10在上料或下料的过程中出现断电的问题,而所述自动充电桩距离所述agv小车10比较远,手动充电则会比较麻烦,容易影响工作进度。作为本实用新型一较佳实施例,所述自动充电桩被设置为至少两个,其中任意两个所述自动充电桩分别被设置于所述agv小车10的上料工位和下料工位,以实现所述agv小车10能够同时在所述上料工位以及所述下料工位进行充电,充电更加方便。
39.除了所述上料工位以及所述下料工位的所述自动充电桩,另外,在所述agv小车10 行进的沿途也可以设置所述自动充电桩,以作为备用。
40.作为本实用新型一较佳实施例,所述agv小车10还包括被设置于所述车体101的动力组件103,其中所述动力组件103包括驱动轮1031、随动轮1032和驱动元件1033,其中所述驱动轮1031与所述驱动元件1033电连接,而所述驱动元件1033同时与所述储能机构102和所述控制装置电连接。所述驱动元件1033通过传动轴1034带动所述驱动轮1031运转,进而所述驱动轮1031带动所述随动轮1032一起运转,以使所述agv 小车10运行的更加稳定。所述驱动轮1031被优选设置靠近所述车体101的中部,而所述随动轮1032被设置靠近所述车体101的后部。
41.优选地,所述驱动元件1033被实施为差速电机,其中所述差速电机由电机和滑差离合器组成,从而通过所述电机提供旋转动力,并通过所述滑差离合器提供双驱差速传动,能够有效提高该agv小车10的扭矩,使其具有更强的爬坡载重能力。另外,这种差速电机的内部采用全刚齿轮传动,拆装更加方便,且节能环保,噪音低。
42.进一步优选地,所述agv小车10还包括被设置于所述车体101的避障组件,其中所述避障组件包括至少一避障传感器104,其中所述避障传感器104与所述控制装置电连接,且所述避障传感器104靠近所述车体101的前端,以在行进过程中使所述agv小车10能够自动躲避各种障碍物,以免对所述车体101造成误伤,或对周边的工作人员以及其他设备造成损害,行驶更加安全。
43.进一步优选地,所述避障传感器104被实施为激光传感器和超声传感器的组合,从而同时通过激光技术以及超声技术实现对周边环境的监测,以进一步提高所述agv小车 10的安全性能。
44.更优选地,所述避障组件包括至少四个所述避障传感器104,且至少四个所述避障传感器104分别被设置于所述车体101的前端、后端以及两侧,使得所述agv小车10 不仅能够在前进过程中自动避障,还能够在后退过程中实现自动避障,且能够随时监控两侧的环境,以确保所述agv小车10的安全运行。
45.根据生产需要,一般情况下所述agv小车10需要负载一顿以上的重量,另外,叉车式agv不方便进入工厂的厂房,因此,作为本实用新型一较佳实施例,所述agv小车 10还包括被设置于所述车体101的底部的磁导航感应装置105,比如磁导航传感器,其中所述磁导航感应装置105与所述控制装置电连接,以识别一磁导轨而能够随所述磁导轨定向移动,使所述agv小车10通过所述磁导轨进行导航前进。所述磁导轨可以被直接设置在地面上,也可以被设置在一些工作台或其他载体上。此外,磁条导航的前期投入以及后期维护费用较低,
能够有效节约企业的开支,使得该agv输料系统适于在各种大中小型企业进行推广使用。
46.优选地,所述agv小车10还包括被设置于所述车体101的地标传感器106,其中所述地标传感器106与所述控制装置电连接,以能够识别所述agv小车10在行进途中的各种rfid卡等信号指标,便于所述agv小车10作出对应的反应。
47.进一步优选地,所述agv小车10还包括被设置于所述车体101的安全传感器以及被设置于所述车体的外侧壁的机械防撞条107,其中所述安装传感器与所述控制装置电连接,以进一步确保所述agv小车10的行进安全,保护所述agv小车10的车体101。
48.进一步优选地,所述车体101还安装有警报装置108,其中所述警报装置108与所述控制装置电连接,以在所述agv小车10出现异常状况时发出警报,能够及时提醒工作人员进行处理。
49.本领域的技术人员应理解,上述描述及附图中所示的本实用新型的实施例只作为举例而并不限制本实用新型。本实用新型的优势已经完整并有效地实现。本实用新型的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本实用新型的实施方式可以有任何变形或修改。