1.本发明涉及例如拖拉机等作业车辆。
背景技术:
2.以往,作为农业机械已知有专利文献1。专利文献1的农业机械具备:行驶机体,所述行驶机体自由切换通过手动转向进行的手动行驶和沿着与行驶基准线平行地设定的设定行驶线通过自动转向进行行驶的自动行驶;以及切换开关,所述切换开关自由切换手动行驶和自动行驶。另外,农业机械在沿着田垄在行驶中按压右指示按钮后,设定行驶基准线的起点,通过在行驶中按压左指示按钮来设定行驶基准线的终点。即,在自动转向前进行行驶基准线的设定。
3.现有技术文献
4.专利文献
5.专利文献1:日本公开专利公报“2017-123803号公报”
技术实现要素:
6.发明要解决的课题
7.在专利文献1的农业机械中,通过利用切换开关从手动行驶切换为自动行驶,能够简单地进行自动行驶。在农业机械中,实际情况是未考虑一边后退一边进行自动行驶。特别是,驾驶员难以确认与后退时的自动行驶相关的事项(信息)。
8.因此,本发明鉴于上述问题,其目的在于提供一种能够简单地进行后退时的自动转向的作业车辆。
9.用于解决课题的方案
10.用于解决该技术问题的本发明的技术方案的特征如下。
11.作业车辆具备:车身,所述车身能够通过由方向盘进行的手动转向和所述方向盘的自动转向中的任一个来行驶;基准登记部,所述基准登记部基于通过所述手动转向而行驶的车身的位置来登记行驶基准线;自动转向控制部,所述自动转向控制部进行基于所述行驶基准线而设定的行驶预定线的所述自动转向的控制;显示装置,所述显示装置在所述自动转向为前进时显示与所述自动转向相关的信息;以及告知装置,所述告知装置在所述自动转向为后退时,与所述显示装置分开地告知与所述自动转向相关的信息。
12.作业车辆具备对所述自动转向的开始或结束进行切换的转向切换开关,所述显示装置在所述自动转向结束后,在所述自动转向为前进时显示用于对所述自动转向的开始条件进行调整的引导画面,所述告知装置在所述自动转向为后退时,通过声音或光来告知所述自动转向的开始条件是否齐备。
13.所述显示装置根据所述行驶基准线的方位与所述车身的方位的方位差,在所述引导画面中显示自动转向的开始条件齐备的状态。
14.所述告知装置根据所述行驶基准线的方位与所述车身的方位的方位差,通过变更
所述声音或所述光的形态来告知所述自动转向的开始条件是否齐备。
15.所述显示装置在所述自动转向为后退时至少显示与引导画面不同的画面。
16.所述显示装置在所述自动转向为后退时显示催促观察后方的画面。
17.发明的效果
18.根据本发明,能够简单地进行后退时的自动转向。
附图说明
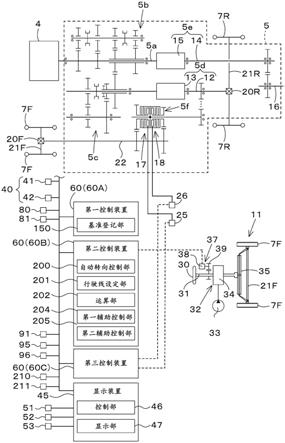
19.图1是表示拖拉机的结构以及控制框图的图。
20.图2是说明自动转向的说明图。
21.图3是说明自动转向的动作的说明图。
22.图4是表示驾驶画面m1、引导画面m2以及设定画面m3的一例的图。
23.图5是表示转弯引导画面m2a以及行距引导画面m2b的一例的图。
24.图6a是简单地表示从直行的行驶到转弯行驶j1的概略图。
25.图6b是表示行进方向的方位(车身方位)f1与行驶基准线l1的方位(线方位)f2不同的状态的图。
26.图7a是表示方位差δf3一致的情况下的转弯引导画面m2a的一例的图。
27.图7b是表示方位差δf3不同的情况下的转弯引导画面m2a的一例的图。
28.图7c是表示转弯后,方位差δf3在阈值以内的情况下的转弯引导画面m2a的一例的图。
29.图8是表示主设定画面m3a的一例的图。
30.图9是表示从主设定画面m3a切换为详细设定画面m3b的状态的图。
31.图10a是表示详细设定画面m3b1的一例的图。
32.图10b是表示详细设定画面m3b2的一例的图。
33.图10c是表示详细设定画面m3b3的一例的图。
34.图11是表示基于输入按钮的操作的动作的流程的图。
35.图12是表示设定了自动转向的起点以及终点的拖拉机的行驶轨迹的图。
36.图13是表示由变更操作部件进行的相邻宽度l10的变更的流程的图。
37.图14是表示通过自动进行的相邻宽度l10的变更的流程的图。
38.图15a是表示不变更相邻宽度l10的情况下的行距辅助的图。
39.图15b是表示变更了相邻宽度l10的情况下的行距辅助的图。
40.图16是表示告知装置的动作的图。
41.图17是表示驾驶座周围的图。
42.图18是拖拉机的整体图。
具体实施方式
43.以下,基于附图来说明本发明的实施方式。
44.图18是表示作业车辆1的一实施方式的侧视图,图18是表示作业车辆1的一实施方式的俯视图。在本实施方式的情况下,作业车辆1是拖拉机。但是,作业车辆1并不限于拖拉机,既可以是联合收割机、移植机等农业机械(农业车辆),也可以是装载作业机等建筑机械
(建筑车辆)。
45.图18是表示作业车辆1的侧视图。使用图18等对拖拉机(作业车辆)1进行说明。以下,将就座于拖拉机(作业车辆)1的驾驶座10的驾驶员的前侧设为前方,将驾驶员的后侧设为后方,将驾驶员的左侧设为左方,将驾驶员的右侧设为右方进行说明。另外,将与作业车辆1的前后方向正交的方向即水平方向设为车身宽度方向进行说明。
46.如图18所示,拖拉机1具备车身3、动力机4以及变速装置5。车身3具有行驶装置7而能够行驶。行驶装置7是具有前轮7f和后轮7r的装置。前轮7f可以是轮式也可以是履带式。另外,后轮7r同样可以是轮式也可以是履带式。
47.动力机4是柴油发动机、电动马达等,在本实施方式中由柴油发动机构成。变速装置5能够通过变速对行驶装置7的推进力进行切换,并且能够进行行驶装置7的前进、后退的切换。在车身3设置有驾驶座10。
48.另外,在车身3的后部设置有由三点连杆机构等构成的连结部8。在连结部8能够装卸作业装置2。通过将作业装置2与连结部8连结,能够利用车身3牵引作业装置2。作业装置2是进行耕耘的耕耘装置、播撒肥料的肥料播撒装置、播撒农药的农药播撒装置、进行收获的收获装置、进行牧草等的收割的收割装置、起垄的起垄装置等,是对田地等对地进行作业(对地作业)的装置。
49.如图1所示,变速装置5具备主轴(推进轴)5a、主变速部5b、副变速部5c、梭动部5d、pto动力传递部5e以及前变速部5f。推进轴5a旋转自如地支承于变速装置5的壳体(变速箱),来自动力机4的曲轴的动力被传递到该推进轴5a。主变速部5b具有多个齿轮以及变更该齿轮的连接的换挡器。主变速部5b通过利用换挡器适当变更多个齿轮的连接(啮合),从而变更从推进轴5a输入的旋转并输出(变速)。
50.副变速部5c与主变速部5b同样地,具有多个齿轮以及变更该齿轮的连接的换挡器。副变速部5c通过利用换挡器适当变更多个齿轮的连接(啮合),从而变更从主变速部5b输入的旋转并输出(变速)。
51.梭动部5d具有梭动轴12和前进后退切换部13。从副变速部5c输出的动力经由齿轮等被传递到梭动轴12。前进后退切换部13例如由液压离合器等构成,通过液压离合器的通断来切换梭动轴12的旋转方向、即拖拉机1的前进以及后退。梭动轴12与后轮差速装置20r连接。后轮差速装置20r将安装有后轮7r的后车轴21r支承为旋转自如。
52.pto动力传递部5e具有pto推进轴14和pto离合器15。pto推进轴14被支承为旋转自如,能够传递来自推进轴5a的动力。pto推进轴14经由齿轮等与pto轴16连接。pto离合器15例如由液压离合器等构成,通过液压离合器的通断而切换为将推进轴5a的动力传递到pto推进轴14的状态和不将推进轴5a的动力传递到pto推进轴14的状态。
53.前变速部5f具有第一离合器17和第二离合器18。第一离合器17以及第二离合器18能够传递来自推进轴5a的动力,例如,梭动轴12的动力经由齿轮以及传动轴被传递。来自第一离合器17以及第二离合器18的动力能够经由前传动轴22传递到前车轴21f。具体而言,前传动轴22与前轮差速装置20f连接,前轮差速装置20f将安装有前轮7f的前车轴21f支承为旋转自如。
54.第一离合器17以及第二离合器18由液压离合器等构成。在第一离合器17连接有油路,在该油路连接有从液压泵33排出的工作油被供给的第一工作阀25。第一离合器17通过
第一工作阀25的开度而切换为连接状态和切断状态。在第二离合器18连接有油路,在该油路连接有第二工作阀26。第二离合器18通过第二工作阀26的开度而切换为连接状态和切断状态。第一工作阀25以及第二工作阀26例如是带有电磁阀的双位切换阀,通过对电磁阀的螺线管进行励磁或消磁,从而切换为连接状态或切断状态。
55.在第一离合器17为切断状态且第二离合器18为连接状态的情况下,通过第二离合器18将梭动轴12的动力传递到前轮7f。由此,成为前轮7f和后轮7r通过动力进行驱动的四轮驱动(4wd),并且前轮7f与后轮7r的旋转速度大致相同(4wd等速状态)。另一方面,在第一离合器17为连接状态且第二离合器18为切断状态的情况下,成为四轮驱动,并且前轮7f的旋转速度比后轮7r的旋转速度快(4wd增速状态)。另外,在第一离合器17以及第二离合器18为切断状态的情况下,由于梭动轴12的动力不传递到前轮7f,因此,成为后轮7r通过动力进行驱动的二轮驱动(2wd)。
56.拖拉机1具备定位装置40。定位装置40能够利用d-gps、gps、glonass、北斗、伽利略、qzss等卫星定位系统(定位卫星)来检测自身的位置(包含纬度、经度在内的定位信息)。即,定位装置40接收从定位卫星发送的卫星信号(定位卫星的位置、发送时刻、修正信息等),基于卫星信号来检测位置(例如,纬度、经度)。定位装置40具有信号接收装置41和惯性测量装置(imu:inertial measurement unit)42。信号接收装置41是具有天线等并接收从定位卫星发送的卫星信号的装置,与惯性测量装置42分开地安装于车身3。在本实施方式中,信号接收装置41经由支承部件安装在驾驶室的车顶的上方。需要说明的是,信号接收装置41的安装部位并不限定于实施方式。
57.惯性测量装置42具有检测加速度的加速度传感器、检测角速度的陀螺仪传感器等。设置在车身3、例如驾驶座10的下方,通过惯性测量装置42能够检测车身3的侧倾角、俯仰角、横摆角等。
58.如图1所示,拖拉机1具备转向装置11。转向装置11是能够进行通过驾驶员的操作进行车身3的转向的手动转向和不依赖于驾驶员的操作而自动进行车身3的转向的自动转向的装置。
59.转向装置11具有方向盘(方向盘)30和将方向盘30支承为能够旋转的转向轴(旋转轴)31。另外,转向装置11具有辅助机构(动力转向装置)32。辅助机构32通过液压等对转向轴31(方向盘30)的旋转进行辅助。辅助机构32包括液压泵33、被供给从液压泵33排出的工作油的控制阀34、以及通过控制阀34进行工作的转向缸35。控制阀34例如是能够通过滑阀等的移动进行切换的三位切换阀,与转向轴31的转向方向(旋转方向)对应地切换。转向缸35与改变前轮7f的朝向的臂(转向节臂)连接。
60.因此,若驾驶员把持方向盘30并向一个方向或另一个方向操作,则控制阀34的切换位置以及开度与该方向盘30的旋转方向对应地切换,根据该控制阀34的切换位置以及开度,转向缸35向左或右伸缩,由此能够变更前轮7f的转向方向。即,车身3能够通过方向盘30的手动转向将行进方向变更为左或右。
61.如图2所示,在进行自动转向时,首先,在进行自动转向之前设定行驶基准线l1。在设定行驶基准线l1之后,能够通过进行与该行驶基准线l1平行的行驶预定线l2的设定来进行自动转向。在自动转向中,自动进行拖拉机1(车身3)的行进方向的转向,以使由定位装置40测出的车身位置与行驶预定线l2一致。
62.具体而言,在进行自动转向之前,使拖拉机1(车身3)移动到田地内的规定位置(s1),当驾驶员在规定位置进行设置于拖拉机1的转向切换开关(登记开关)52的操作时(s2),由定位装置40测出的车身位置被设定为行驶基准线l1的起点p10(s3)。另外,使拖拉机1(车身3)从行驶基准线l1的起点p10移动(s4),当驾驶员在规定的位置进行转向切换开关(登记开关)52的操作时(s5),由定位装置40测出的车身位置被设定为行驶基准线l1的终点p11(s6)。因此,连结起点p10和终点p11的直线被设定为行驶基准线l1。
63.在设定行驶基准线l1之后(s6后),例如,使拖拉机1(车身3)移动到与设定了行驶基准线l1的场所不同的场所(s7),当驾驶员进行转向切换开关52的操作时(s8),设定与行驶基准线l1平行的直线即行驶预定线l2(s9)。在设定行驶预定线l2之后,开始自动转向,变更拖拉机1(车身3)的行进方向以使其沿着行驶预定线l2。例如,在当前的车身位置相对于行驶预定线l2位于左侧的情况下,前轮7f向右转向,在当前的车身位置相对于行驶预定线l2位于右侧的情况下,前轮7f向左转向。需要说明的是,在自动转向中,拖拉机1(车身3)的行驶速度(车速)能够通过由驾驶员手动变更设置于该拖拉机1的加速器(加速踏板、加速杆)210的操作量,或者通过变速部件(变速杆、变速开关)211变更变速装置5的变速挡而变更。
64.另外,在自动转向开始后,当驾驶员在任意的部位进行转向切换开关52的操作时,能够结束自动转向。即,行驶预定线l2的终点能够通过基于转向切换开关52的操作的自动转向的结束来设定。即,从行驶预定线l2的起点到终点的长度可以设定得比行驶基准线l1长或短。换言之,行驶预定线l2不与行驶基准线l1的长度建立关联,通过行驶预定线l2,能够在比行驶基准线l1的长度长的距离一边自动转向一边行驶。
65.如图1所示,转向装置11具有自动转向机构37。自动转向机构37是进行车身3的自动转向的机构,基于由定位装置40检测到的车身3的位置(车身位置)对车身3进行自动转向。自动转向机构37具备转向电机38和齿轮机构39。转向电机38是能够基于车身位置来控制旋转方向、旋转速度、旋转角度等的电机。齿轮机构39包括设置于转向轴31并且与该转向轴31一同旋转的齿轮、以及设置于转向电机38的旋转轴并且与该旋转轴一同旋转的齿轮。当转向电机38的旋转轴旋转时,经由齿轮机构39,转向轴31自动旋转(转动),能够变更前轮7f的转向方向,以使车身位置与行驶预定线l2一致。
66.如图1所示,拖拉机1具备设定开关51。设定开关51是至少切换为进行自动转向开始前的设定的设定模式的开关。设定模式是在开始自动转向之前进行与该自动转向相关的各种设定的模式,例如是进行行驶基准线l1的起点、终点的设定等的模式。
67.设定开关51能够切换为接通或断开,在接通的情况下输出设定模式有效的信号,在断开的情况下输出设定模式无效的信号。另外,设定开关51在接通的情况下将设定模式有效的信号输出到后述的显示装置45,在断开的情况下将设定模式无效的信号输出到显示装置45。
68.拖拉机1具备转向切换开关52。转向切换开关52是切换自动转向的开始或结束的开关。具体而言,转向切换开关52能够从中立位置向上、下、前、后切换,当在设定模式有效的状态下从中立位置向下方切换的情况下输出自动转向的开始,当在设定模式有效的状态下从中立位置向上方切换的情况下输出自动转向的结束。另外,转向切换开关52当在设定模式有效的状态下从中立位置向后切换的情况下,输出对行驶基准线l1的起点p10进行设
定,转向切换开关52当在设定模式有效的状态下从中立位置向前切换的情况下,输出对行驶基准线l1的终点p11进行设定。即,转向切换开关52兼用作设定行驶基准线l1的开始位置(起点p10)以及结束位置(终点p11)的登记开关和切换自动转向的开始或结束的开关。
69.如图1所示,拖拉机1具备多个控制装置60。多个控制装置60是进行拖拉机1中的行驶系统的控制、作业系统的控制、车身位置的运算等的装置。多个控制装置60是第一控制装置60a、第二控制装置60b以及第三控制装置60c。
70.第一控制装置60a接收信号接收装置41接收到的卫星信号(接收信息)和惯性测量装置42测出的测定信息(加速度、角速度等),基于接收信息以及测定信息求出车身位置。
71.另外,第一控制装置60a具有基准登记部150。基准登记部150由设置于第一控制装置60a的电气/电子电路、存储于cpu等的程序等构成。如上所述,基准登记部150进行行驶基准线l1的登记、即起点p10以及终点p11的设定。基准登记部150在设为设定模式的状态下通过手动转向使拖拉机1行驶的状况下,当将转向切换开关52向起点设定侧操作时,将车身位置设定与行驶基准线l1的起点p10,当将转向切换开关52向终点设定侧操作时,将车身位置设定于行驶基准线l1的终点p11。
72.第二控制装置60b具有自动转向控制部200。自动转向控制部200由设置于第二控制装置60b的电气/电子电路、存储于cpu等的程序等构成。自动转向控制部200对自动转向机构37的转向电机38进行控制,以使车身3沿着行驶预定线l2行驶。
73.如图3所示,当将转向切换开关52向自动转向的开始侧操作时,自动转向控制部200基于与行驶基准线l1平行的行驶预定线l2,进行拖拉机1(车身3)的自动转向。自动转向控制部200在车身位置与行驶预定线l2之间的偏差小于阈值的情况下,自动转向控制部200维持转向电机38的旋转轴的旋转角。在车身位置与行驶预定线l2之间的偏差(位置偏差)为阈值以上且拖拉机1相对于行驶预定线l2位于的左侧情况下,自动转向控制部200以使拖拉机1的转向方向成为右方向的方式使转向电机38的旋转轴旋转。即,自动转向控制部200以位置偏差为零的方式设定右方向的转向角。在车身位置与行驶预定线l2之间的偏差为阈值以上且拖拉机1相对于行驶预定线l2位于右侧的情况下,自动转向控制部200以使拖拉机1的转向方向成为左方向的方式使转向电机38的旋转轴旋转。即,自动转向控制部200以位置偏差为零的方式设定左方向的转向角。
74.需要说明的是,在上述实施方式中,基于车身位置与行驶预定线l2之间的偏差来变更转向装置11的转向角,但在行驶预定线l2的方位与拖拉机1(车身3)的行进方向(行驶方向)的方位(车身方位)f1不同的情况下,即,在车身方位f1相对于行驶预定线l2的角度θg为阈值以上的情况下,自动转向控制部200也可以以角度θg成为零(车身方位f1与行驶预定线l2的方位一致)的方式设定转向角。另外,自动转向控制部200也可以基于根据偏差(位置偏差)求出的转向角和根据方位(方位偏差)求出的转向角,设定自动转向中的最终的转向角。上述实施方式中的自动转向中的转向角的设定是一例,并未限定。需要说明的是,车身3的方位(车身方位)f1能够通过定位装置40求出。
75.另外,第二控制装置60b在由自动转向控制部200进行自动转向的情况下,在操作了加速器210时,根据加速器210的操作量,变更动力机4的转速(动力机转速)。另外,第二控制装置60b在由自动转向控制部200进行自动转向的情况下,在操作了变速部件211的情况下,变更变速装置5的变速挡。
76.第三控制装置60c根据设置在驾驶座10的周围的操作部件的操作,使连结部8升降。需要说明的是,第一控制装置60a、第二控制装置60b以及第三控制装置60c也可以一体化。另外,上述行驶系统的控制、作业系统的控制、车身位置的运算并未限定。如上所述,通过控制装置60,能够对拖拉机1(车身3)进行自动转向。
77.如图1所示,拖拉机1具备显示装置45。显示装置45是能够显示与拖拉机1相关的各种信息的装置,至少能够显示拖拉机1的驾驶信息。显示装置45设置在驾驶座10的前方。
78.显示装置45具备控制部(显示控制部)46和显示部47。控制部46对显示装置45的画面的显示等进行各种控制。控制部46由设置于显示装置45的电气/电子电路、存储于cpu等的程序等构成。显示部47由液晶面板等构成,根据控制部46的控制显示各种信息。需要说明的是,以后,以控制部46进行显示装置45的画面等的控制这种情况进行说明。
79.如图4所示,显示装置45(控制部46)在进行规定的操作时,显示驾驶画面m1、引导画面m2以及多个设定画面m3。
80.驾驶画面m1包括显示动力机4的转速(动力机转速)的旋转显示部62。旋转显示部62包括通过显示条等显示动力机转速的等级显示部62a和用数字显示动力机转速的数字显示部62b。在行驶基准线l1的设定完成的情况下,驾驶画面m1显示表示行驶基准线l1的起点p10的设定完成的符号标记63a和表示行驶基准线l1的终点p11的设定完成的符号标记63b。
81.如图5所示,引导画面m2包括转弯引导画面m2a和行距引导画面m2b。如图6a所示,在设定行驶基准线l1的终点p11之后,或者自动转向结束后p12,为了开始自动转向,需要在通过手动操作等使拖拉机1进行转弯行驶j1后,调整自动转向的条件。例如,如图6b所示,在使拖拉机1转弯后,在自动转向前,在该拖拉机1的行进方向的方位(车身方位)f1与行驶基准线l1(行驶预定线l2)的方位(线方位)f2之差即方位差δf3大不相同的情况下,即便开始自动转向,也难以沿着与行驶基准线l1平行的行驶预定线l2对拖拉机1进行转向。需要说明的是,行驶基准线l1(行驶预定线l2)的方位(线方位)f2也可以与线的延伸方向一致,是从线的一端向另一端延伸的方向和从线的另一端向一端延伸的方向中的任一个。换言之,车身方位f1与线方位f2一致(没有方位差δf3)是指拖拉机1的行进方向与行驶基准线l1(行驶预定线l2)的延伸方向一致的状态。
82.因此,如图7a~图7c所示,转弯引导画面m2a显示作为自动转向的开始条件的方位差δf3。在转弯引导画面m2a中,在方位差δf3被显示得较小的情况下,驾驶员能够掌握自动转向的条件齐备。
83.使用图7a~图7c,对转弯引导画面m2a进行说明。在以下的说明中,有时将拖拉机1(车身3)行驶的当前的行驶预定线l2或拖拉机1(车身3)即将结束自动转向之前的行驶预定线l2表示为“行驶预定线l2b”,在下一次的自动转向结束后,将下一条行驶预定线l2表示为“行驶预定线l2c”。
84.转弯引导画面m2a包括车身方位显示部64、车身显示部65以及基准方位显示部66。需要说明的是,为便于说明,用虚线表示车身方位显示部64。
85.车身方位显示部64是表示车身方位f1的部分,在转弯引导画面m2a中用直线(在转弯引导画面m2a中上下延伸的直线)表示。车身方位显示部64的显示位置在转弯引导画面m2a中是固定的,位置不变化。车身显示部65是用图形表示车身3的部分,并且与车身方位显示部64重叠。车身显示部65是多边形的图形,包括前端尖锐的前端部65a,前端部65a表示拖
拉机1(车身3)的前部。
86.基准方位显示部66是表示行驶基准线l1(下一条行驶预定线l2)的方位f2的部分,在转弯引导画面m2a中用直线表示。如图7a所示,在车身方位f1与线方位f2一致的情况下,车身方位显示部64和基准方位显示部66重叠显示。由于车身方位显示部64与基准方位显示部66的着色不同,因此,驾驶员等能够目视确认车身方位f1与线方位f2一致。
87.如图7b所示,当通过拖拉机1(车身3)的转弯行驶j1,车身方位f1与线方位f2的方位差δf3变大时,控制部46使直线状的基准方位显示部66根据方位差δf3变更显示位置。具体而言,基准方位显示部66在以车身显示部65为中心o1的情况下,作为该车身显示部的中心o1,根据方位差δf3的大小而转动。显示装置45(控制部46)随着方位差δf3变大而增大基准方位显示部66与车身显示部65的角度θ1,随着方位差δf3变小而减小基准方位显示部66与车身显示部65的角度θ1。如图7c所示,如果下一个线显示部68a或68b与车身显示部65重叠,则表示自动转向的条件齐备。换言之,若方位差δf3成为预先确定的规定以下,则自动转向的条件齐备。
88.另外,转弯引导画面m2a显示下一个线显示部68a以及68b。在如后述那样变更了相邻宽度的情况下显示下一个线显示部68b。下一个线显示部68a是表示从拖拉机1(车身3)行驶的行驶预定线l2b起至少下一条行驶预定线l2c的部分,表示拖拉机1(车身3)在自动转向时直行的直行部。线显示部(直行部)68a在转弯引导画面m2a中,在相距车身方位显示部64规定距离的位置示出。
89.如图5所示,行距引导画面m2b是表示在自动转向的条件齐备的状态下,将拖拉机1(车身3)朝向下一条行驶预定线l2c与自动转向控制部200分开地通过自动转向进行引导的画面。行距引导画面m2b包括下一个线显示部68a和表示通过自动转向将拖拉机1(车身3)引导到下一个线显示部68a(进行行距辅助)的引导显示部69。
90.如图8~图10c所示,多个设定画面m3包括主设定画面m3a和详细设定画面m3b。主设定画面m3a以及详细设定画面m3b的设定信息是与车身3相关的信息、即与自动转向相关的信息。
91.如图8所示,主设定画面m3a作为设定信息,进行设定项目70a~70h和设定值71a~70h的显示。
92.设定项目70a是将自动转向的灵敏度表示为设定值71a的项目,灵敏度能够设定为敏感、普通、迟钝这三个设定值。在将设定值设定为敏感的情况下,自动转向的转向角比自动转向时的偏差(位置偏差、方位偏差)大,在将设定值设定为迟钝的情况下,自动转向的转向角比自动转向时的偏差(位置偏差、方位偏差)小,在将设定值设定为普通的情况下,自动转向的转向角相对于自动转向时的偏差(位置偏差、方位偏差)成为迟钝与敏感之间的值。即,灵敏度表示:相对于偏差(位置偏差、方位偏差),转向角的变化的响应程度。
93.设定项目70b是表示转弯引导画面m2a(转弯引导)的项目,表示在自动转向后是否显示转弯引导画面m2a的通断是设定值71b。在设定值71b为“接通”的情况下,显示转弯引导画面m2a,在设定值71b为“断开”的情况下,不显示转弯引导画面m2a。即,设定值71b通过转弯引导画面m2a来设定是否进行转弯引导。转弯引导画面m2a在自动转向开始时成为非显示。
94.设定项目70c是表示行距引导画面m2b(行距辅助)的项目,表示在自动转向开始时
是否显示行距引导画面m2b的通断是设定值71c。在设定值71c为“接通”的情况下,显示行距引导画面m2b,在设定值71c为“断开”的情况下,不显示行距引导画面m2b。即,设定值71c设定是否通过自动转向进行行距辅助。
95.设定项目70d是表示通过手动转向而转弯的次数(转弯计数)、即通过行驶预定线l2进行了自动转向的作业条数的项目,表示是否进行作业条数的运算的通断是设定值71d。在设定值71d为“接通”的情况下,进行作业条数的运算,在设定值71d为“断开”的情况下,不进行作业条数的运算。
96.设定项目70e是表示作业种类的项目,对设定值71e而言,耕耘、耙地、田埂镶边防漏、播种等农作业是设定值。设定项目70f是表示基准相邻宽度l11的项目,对设定值71f而言,基准相邻宽度l11的数值是设定值。设定项目70g是表示变更相邻宽度(相邻延长宽度)l12的项目,对设定值71g而言,变更相邻宽度l12的数值是设定值。设定项目70h是表示位置修正(gps位置修正)的项目,对设定值71h而言,位置修正的数值是设定值。
97.详细设定画面m3b是进行设定值71a~70h的设定(输入)以及显示的画面。在主设定画面m3a中,若进行规定的操作,则如图9所示,从主设定画面m3a切换为详细设定画面m3b。详细设定画面m3b包括显示设定项目70a~70h的一览的一览显示部72,在一览显示部72显示光标k10。
98.当通过光标k10选择多个设定项目70a~70h中的规定的设定项目时,详细设定画面m3b向输入与所选择的设定项目对应的设定值的画面推移。例如,如图9所示,当在详细设定画面m3b中选择表示灵敏度的设定项目70a时,如图10a所示,详细设定画面m3b向变更灵敏度的详细设定画面m3b1推移。在详细设定画面m3b1中,显示敏感、普通、迟钝这三个设定值,通过由光标k10选择规定的设定值,能够变更设定值。
99.另外,当在图9所示的详细设定画面m3b中选择表示基准相邻宽度l11的设定项目70f时,如图10b所示,详细设定画面m3b向变更基准相邻宽度l11的详细设定画面m3b2推移。在详细设定画面m3b2中,显示输入基准相邻宽度l11的基准输入部75。基准输入部75包括按照每位输入数值的多个位输入部,例如包括输入第一位的数值的一位输入部75a、输入第二位的数值的二位输入部75b、输入第三位的数值的三位输入部75c、以及决定数值的决定部75d。需要说明的是,在本实施方式中,在基准输入部75,对输入三位数字的位输入部进行了说明,但位数并未限定。
100.另外,当在图9所示的详细设定画面m3b中选择表示变更相邻宽度(相邻延长宽度)l12的设定项目70g时,如图10c所示,详细设定画面m3b向对变更相邻宽度l12进行变更的详细设定画面m3b3推移。在详细设定画面m3b3中,显示输入变更相邻宽度l12的变更输入部76。变更输入部76由按照每位输入数值的多个位输入部构成,例如包括输入第一位的数值的一位输入部76a、输入第二位的数值的二位输入部76b、以及决定数值的决定部76c。需要说明的是,在本实施方式中,在变更输入部76,对输入二位数字的位输入部进行了说明,但位数并未限定。
101.如图1以及图17所示,拖拉机1(车身3)具备输入按钮80。输入按钮80与显示装置45(控制部46)连接。输入按钮80例如是能够接通/断开的自动恢复型的按钮(按压按钮)。输入按钮80能够通过第一操作和第二操作这两个操作,在多个设定画面m3中进行画面的切换、光标k10的移动以及设定值的设定。
102.如图17所示,作为第一操作,输入按钮80能够进行按压时间(按压时间、接通的时间)t10短的短按操作,作为第二操作,输入按钮80能够进行按压时间t10比短按操作长的长按操作。
103.需要说明的是,输入按钮80例如安装于在驾驶座10的前方设置的前罩(操纵台罩)151。显示装置45、设定开关51、转向切换开关52、修正开关53以及梭动杆91等也安装于操纵台罩151。
104.显示装置45(控制部46)在进行了长按操作的情况下执行多个设定画面m3的切换,并且当在切换后的设定画面m3中进行了短按操作的情况下,执行移动到多个设定项目70a~70h中的规定的设定项目的光标k10的移动,进而,当在光标k10位于规定的设定项目的项目时进行了长按操作的情况下,执行规定的设定项目的决定。
105.具体而言,如图8所示,在主设定画面m3a中,在对输入按钮80进行了长按操作的情况下,如图8以及图9所示,从主设定画面m3a切换为详细设定画面m3b。如图9所示,在详细设定画面m3b中,每当对输入按钮80进行短按操作时,光标k10的位置发生变化,能够使该光标k10从多个设定项目70a~70h位于规定的设定项目。
106.在图9中,如果在使光标k10位于表示灵敏度的设定项目70a的状态下对输入按钮80进行长按操作,则决定表示灵敏度的设定项目70a,如图10a所示,从详细设定画面m3b向设定灵敏度的详细设定画面m3b1推移。
107.另外,在图9中,如果在使光标k10位于表示基准相邻宽度l11的设定项目70f的状态下对输入按钮80进行长按操作,则决定表示基准相邻宽度l11的设定项目70f,如图10b所示,从详细设定画面m3b向设定灵敏度的详细设定画面m3b2推移。
108.另外,在图9中,如果在使光标k10位于表示变更相邻宽度l12的设定项目70g的状态下对输入按钮80进行长按操作,则决定表示变更相邻宽度l12的设定项目70g,如图10c所示,从详细设定画面m3b向设定灵敏度的详细设定画面m3b3推移。
109.如图10a所示,显示装置45在对设定值进行设定的设定画面(详细设定画面m3b1)中,在进行了短按操作的情况下,使光标k10移动到多个设定值(敏感、普通、迟钝)中的任一个,当在光标k10位于规定的设定值时进行了长按操作的情况下,执行规定的设定值的决定。例如,在通过短按操作使光标k10移动到敏感的状态下进行了长按操作的情况下,能够将设定值设定为敏感。
110.如图10b以及图10c所示,显示装置45在对设定值进行设定的设定画面(详细设定画面m3b2、详细设定画面m3b3)中,在进行了短按操作的情况下,执行光标k10移动到设定值的多个位数中的规定位的移动,当在光标k10位于规定位时进行了长按操作的情况下,执行规定位的决定,进而,在决定规定位之后进行了短按操作的情况下,变更规定位的数值。
111.如图10b所示,在详细设定画面m3b2的基准输入部75中,如果对输入按钮80进行短按操作,则能够使光标k10移动到一位输入部75a、二位输入部75b、三位输入部75c以及决定部75d中的任一个。例如,在三位输入部75c中,如果对输入按钮80进行长按操作,则决定第三位。在决定第三位之后,每当对输入按钮80进行短按操作时,数字逐次增加一个,能够将第三位的数字变更为0~9中的任一个。在基准输入部75中,在向一位输入部75a、二位输入部75b以及三位输入部75c输入数值后,在将光标k10移动到决定部75d的状态下进行长按操作,由此能够将被输入到一位输入部75a、二位输入部75b以及三位输入部75c的数值设定为
基准相邻宽度l11。
112.另外,如图10c如所示,在详细设定画面m3b3的变更输入部76中,如果对输入按钮80进行短按操作,则能够使光标k10移动到一位输入部76a、二位输入部76b、决定部76c。如果对输入按钮80进行长按操作,则能够决定一位输入部76a或二位输入部76b。在决定一位输入部76a或二位输入部76b之后,如果对输入按钮80进行短按操作80b,则能够将数字变更为0~9中的任一个。在变更输入部76中,在向一位输入部76a、二位输入部76输入数值后,在将光标k10移动到决定部76c的状态下进行长按操作,由此能够将被输入到一位输入部76a、二位输入部76b的数值设定为变更相邻宽度l12。
113.图11是汇总了基于输入按钮80的操作的动作的流程的图。
114.在图11中,在驾驶画面m1、引导画面m2、主设定画面m3a中的任一个中(s1),在短按操作的情况下(s2,是),依次切换驾驶画面m1、引导画面m2、主设定画面m3a(s3)。在不是短按操作的情况,而是长按操作的情况下(s2,否),判断进行了长按操作时的画面是否是主设定画面m3a(s4)。在是主设定画面m3a的情况下(s4,是),向详细设定画面m3b推移(s5)。在详细设定画面m3b中,如果进行短按操作(s6,是),则移动光标k10,即从多个设定项目70a~70h中移动到规定的设定项目(s7)。在不是短按操作的情况,而是长按操作的情况下(s6,否),决定规定的设定项目,并向与规定的设定项目相应的详细设定画面m3b1~m3b3推移(s8)。在详细设定画面m3b2、m3b3的情况下(s9,是),判断是否是短按操作(s10)。在是短按操作的情况下(s10,是),将光标k10移动到多个位数中的规定位(s11)。在不是短按操作的情况,而是长按操作的情况下(s10,否),决定规定位(s12),在是短按操作的情况下(s13,是),对规定位的数值进行递增计数(s14)。在不是短按操作的情况,而是长按操作的情况下(s13,否),决定规定位的数值(s15)。当在将光标k10移动到决定部75d或决定部76c的状态下进行长按操作时,能够设定基准相邻宽度l11或变更相邻宽度l12(s16)。需要说明的是,s11~s15能够反复进行。
115.在不是详细设定画面m3b2、m3b3、即是详细设定画面m3b1的情况下(s9,否),判断是否是短按操作(s17)。在是短按操作的情况下(s17,是),将光标k10移动到多个设定值(灵敏度)中的规定的设定值(灵敏度)(s19)。在不是短按操作的情况,而是长按操作的情况下(s17,否),决定规定的设定值(灵敏度)(s18)。
116.如上所述,通过一个输入按钮80的短按操作以及长按操作,不仅能够进行多个设定画面m3的切换,还能够进行设定值的变更。需要说明的是,输入按钮80除了能够进行多个设定画面m3的切换之外,还能够进行其他画面的切换。例如,能够进行驾驶画面m1与引导画面m2的切换。
117.另外,当在田地h1中进行作业(对地作业)的情况下,将作业所对应的作业装置2与拖拉机1连结,使连结有作业装置2的拖拉机1在田地h1行驶。如图12所示,例如,当在田地h1中进行对地作业的情况下,如行驶预定线l2所示,一边反复进行直行和转弯一边进行作业。即,在拖拉机1接近田埂边的情况下进行转弯后,直行,当接近相反侧的田埂边时再次进行转弯后,进行直行。需要说明的是,在转弯时,使处于作业姿势的作业装置2上升,转弯的部分不进行作业。
118.这样,在一边反复转弯一边进行作业时,自动转向在行驶预定线l2的直行部分sln(n=1、2、3...)进行。例如,在第一条直行部分sl1中,在驾驶员通过操作转向切换开关52而
在开始位置st1(stn:n=1)开始自动转向后,驾驶员一边观察作业状态一边操作转向切换开关52,由此在结束位置en1(enn:n=1)结束自动转向。另外,驾驶员根据在第一条直行部分sl1中进行自动转向的状况下对修正开关53进行操作,由此进行拖拉机1的车身位置的微调,或者根据作业状况对加速器210以及变速部件211进行操作来进行拖拉机1的车速的调整。
119.另外,驾驶员通过在结束位置en1结束自动转向后对拖拉机1进行手动转向来进行转弯,在第二条直行部分sl2中,通过对转向切换开关52进行操作,由此在开始位置st2开始自动转向,通过对转向切换开关52进行操作,由此在结束位置en2结束自动转向。即,在田地h1中,拖拉机1在用直行部分sln连结的转弯部分rln一边进行手动转向一边行驶。
120.如上所述,通过在开始位置stn(n=1、2、3...)、结束位置enn(n=1、2、3...)处对转向切换开关52进行操作,能够一边反复进行自动转向以及手动转向一边进行作业。
121.行驶预定线l2的设定由行驶线设定部201进行。行驶线设定部201由设置于第二控制装置60b的电气/电子电路、存储于cpu等的程序等构成。需要说明的是,行驶线设定部201也可以设置于第一控制装置60a、第三控制装置60c,并未限定。行驶线设定部201基于行驶基准线l1进行行驶预定线l2的设定。即,每当开始自动转向时,行驶线设定部201进行与行驶基准线l1平行的直行部分sln的设定。行驶线设定部201例如在第一次的自动转向开始时(n=1的情况下),在相距行驶基准线l1规定距离的位置设定直行部分sl1。行驶基准线l1与直行部分sl1的相邻宽度l10设定为基准相邻宽度l11。另外,行驶线设定部201例如在第二次以后的自动转向开始时(n=2以上的情况下),在相距行驶基准线l1规定距离的位置设定直行部分sln(n=2以上)。
122.在此,行驶线设定部201能够变更多条行驶预定线l2中的相邻的行驶预定线l2彼此的相邻宽度l10。即,行驶线设定部201能够变更前一个直行部分sln-1(n=2以上)和与该前一个直行部分sln-1(n=2以上)相邻的直行部分sln(n=2以上)的相邻宽度l10。
123.如图1所示,拖拉机1具备变更操作部件81。变更操作部件81是能够切换为接通/断开的开关,在接通的情况下,对相邻宽度l10的变更进行指令,在断开的情况下,不对相邻宽度l10的变更进行指令。
124.行驶线设定部201在由变更操作部件81指令了变更的情况下,在存在变更指令的情况下,变更相邻宽度l10。例如,在自动转向中,在存在变更指令的情况下,行驶线设定部201变更当前的进行自动转向的直行部分sln-1(n=2以上)与下一个直行部分sln(n=2以上)的相邻宽度l10。更详细地说,行驶线设定部201将变更相邻宽度l12与基准相邻宽度l11相加而得到的值设定为相邻宽度l10(l10=l11+l12)。例如,当在第三个直行部分sl3进行自动行驶的状况下,在通过将变更操作部件81接通而存在变更指令的情况下,行驶线设定部201将当前的自动转向中的第三个直行部分sl3与接下来的第四个直行部分sl4的相邻宽度l10设定为l10=l11+l12,而不是l10=l11。在接下来的第四个直行部分sl4中,在没有变更指令的情况下,第五个直行部分sl5的相邻宽度l10返回到基准相邻宽度l11。
125.需要说明的是,在自动转向结束后的转弯中等,当在开始自动转向之前对变更操作部件81进行了操作的情况下,行驶线设定部201也将已经进行了自动行驶的前一个直行部分sln-1(n=2以上)与下一个直行部分sln中的相邻宽度l10设定为l10=l11+l12。另外,在变更操作部件81中,在未进行变更指令的情况下,行驶线设定部201将基准相邻宽度l11
设定为相邻宽度l10。
126.图13是表示由变更操作部件81进行的相邻宽度l10的变更的流程的图。
127.在图13中,在自动转向中以及自动转向结束后的任一个中,都判定是否存在变更指令(s20)。在存在变更指令的情况下(s20,是),行驶线设定部201在下一条行驶预定线l2c中,对于相邻宽度l10而言,将变更相邻宽度l12与基准相邻宽度l11相加而得到的值变更为相邻宽度l10(s21)。在没有变更指令的情况下(s20,是),行驶线设定部201在下一条行驶预定线l2c中,将相邻宽度l10固定于基准相邻宽度l11而不进行变更(s22)。行驶线设定部201在作业结束的情况下(s23,是),结束处理,在作业未结束的情况下,返回到s20。如图13所示,能够构成为,在存在变更指令的情况下,变更下一条行驶预定线l2c的相邻宽度l10,在没有变更指令的变更的情况下,不进行下一条行驶预定线l2c的相邻宽度l10的变更。
128.需要说明的是,也可以由修正开关53兼作变更操作部件81。修正开关53是对定位装置40求出的车身位置(定位位置)进行修正的开关,是向一侧(左侧)以及另一侧(右侧)摆动自如的开关。修正开关53例如是如下的开关:若向左侧进行短按操作,则进行使定位位置向车身3的右侧偏移的修正,由此在自动转向时使拖拉机1(车身3)向左侧转向,若向右侧进行短按操作,则进行使定位位置向车身3的左侧偏移的修正,由此在自动转向时使拖拉机1(车身3)向右侧转向。也可以在对修正开关53向左或右侧进行了长按操作时进行变更指令。
129.另外,也可以由显示装置45兼作变更操作部件81。例如,也可以在显示装置45的画面上设置相邻宽度变更图标,在对该图标进行了按压操作时进行变更指令。
130.另外,在上述实施方式中,通过对变更操作部件81进行手动操作来进行相邻宽度l10的变更,但也可以自动变更相邻宽度l10。
131.拖拉机1具备运算部202。运算部202对进行了对地作业的作业条数(对地作业的条数)进行运算。例如,拖拉机1一边直行一边进行作业(对地作业),因此,能够将行驶基准线l1的条数和直行部分sln的条数的合计视为田地h1中的作业的条数(作业条数)wti。即,能够以作业条数wti=行驶基准线l1的条数+直行部分sln的条数来表示。需要说明的是,由于有时不进行作业而进行行驶基准线l1的设定,因此,作业条数wti也可以不包含行驶基准线l1的条数而设为作业条数wti=直行部分sln的条数。
132.具体而言,运算部202将在转向切换开关52中切换为自动转向的开始和结束中的任一方的次数设为作业条数wti。例如,运算部202在行驶基准线l1的设定完成后,将在转向切换开关52中选择了自动转向的开始的次数(开始切换次数)设为作业条数wti。换言之,运算部202将开始位置stn的n数设为作业条数wti。
133.或者,运算部202在设定行驶基准线l1之后,将在转向切换开关52中选择了自动转向的结束的次数(结束切换次数)设为作业条数wti。换言之,运算部202将结束位置etn的n数设为作业条数wti。
134.或者,运算部202也可以将通过手动转向使车身3转弯的次数(结束切换次数)设为作业条数wti。例如,运算部202在设定行驶基准线l1之后,判断是否是手动转向。运算部202在判断为是手动转向的情况下,监视手动转向中的转向装置11的转向角。而且,在手动转向中的转向装置11的转向角为转弯阈值(能够判断为转弯的值)以上的时刻,判断为车身3已转弯而对转弯次数进行计数。换言之,运算部202将行驶预定线l2中的转弯部分rln的n数设为作业条数wti。
135.需要说明的是,将开始切换次数、结束切换次数、结束切换次数中的哪一个设定为作业条数wti,可以在显示装置45的设定画面等中设定。如图7a~图7c所示,在转弯引导画面m2a中,也可以在条数显示部90显示作业条数wti。
136.在运算部202运算出的作业条数wti达到预先确定的规定条数的情况下,行驶线设定部201变更相邻宽度l10。具体而言,在作业条数wti达到规定条数的情况下,行驶线设定部201将变更相邻宽度l12与基准相邻宽度l11相加而得到的值变更为相邻宽度l10,在作业条数wti未达到规定条数的情况下,将基准相邻宽度l11变更为相邻宽度l10。例如,在当前的进行自动转向的直行部分sln-1(n=2以上)中的作业条数wti为10条、规定条数为10条的情况下,将直行部分sln-1(n=2以上)与下一个直行部分sln(n=2以上)的相邻宽度l10设定为l10=l11+l12,而不是l10=l11。
137.图14是表示通过自动进行的相邻宽度l10的变更的流程的图。
138.在图14中,通过运算部202进行作业条数wti的运算(s30)。判断作业条数wti是否达到预先确定的规定条数(s31)。在作业条数wti达到规定条数的情况下(s31,是),行驶线设定部201在下一条行驶预定线l2c中,对相邻宽度l10而言,将变更相邻宽度l12与基准相邻宽度l11相加而得到的值变更为相邻宽度l10(s32)。行驶线设定部201在变更相邻宽度l10后,将作业条数wti重置(s33)。在作业条数wti未达到规定条数的情况下(s31,否),行驶线设定部201在下一条行驶预定线l2c中,将相邻宽度l10固定于基准相邻宽度l11而不进行变更(s34)。行驶线设定部201在作业结束的情况下(s35,是),结束处理,在作业未结束的情况下,返回到s30。如图14所示,能够按每个作业条数变更下一条行驶预定线l2c的相邻宽度l10。需要说明的是,规定条数的设定能够在显示装置45的设定画面中进行。
139.如图7a~图7c所示,在相邻宽度l10的变更、即变更相邻宽度l12与基准相邻宽度l11相加的情况下,在转弯引导画面m2a中显示与下一个线显示部68a不同的下一个线显示部68b。下一个线显示部68a是相邻宽度l10为基准相邻宽度l11的情况下的直行部分sln-1(n=2以上),下一个线显示部68b是相邻宽度l10为变更相邻宽度l12与基准相邻宽度l11相加的情况下的直行部分sln(n=2以上)。由此,当在转弯引导画面m2a中显示有下一个线显示部68b的情况下,驾驶员能够掌握下一条行驶预定线l2c延长了(变更了)相邻宽度l10。
140.另外,在进行了相邻宽度l10的变更的情况下,通过自动转向将拖拉机1(车身3)向下一条行驶预定线l2c引导的行距辅助不同。如图1所示,拖拉机1具备第一辅助控制部204和第二辅助控制部205。第一辅助控制部204以及第二辅助控制部205由设置于第二控制装置60b的电气/电子电路、存储于cpu等的程序等构成。需要说明的是,也可以设置于第一控制装置60a、第三控制装置60c,并未限定。
141.如图15a所示,第一辅助控制部204在未变更相邻宽度l10的情况下,在自动转向结束后,与自动转向控制部200分开地将车身3自动引导到未变更相邻宽度l10的下一条行驶预定线l2c1(直行部分sln-1(n=2以上))。第一辅助控制部204参照由定位装置40检测到的车身位置,自动变更转向角以使车身位置接近下一条行驶预定线l2c1,使车身位置与下一条行驶预定线l2c1一致。
142.如图15b所示,第二辅助控制部205在变更了相邻宽度l10的情况下,在自动转向结束后,与自动转向控制部200分开地将车身3自动引导到变更了相邻宽度l10的下一条行驶预定线l2c2(直行部分sln(n=2以上))。第二辅助控制部205参照由定位装置40检测到的车
身位置,自动变更转向角以使车身位置接近下一条行驶预定线l2c2,使车身位置与下一条行驶预定线l2c2一致。
143.另外,在上述实施方式中,对拖拉机1(车身3)前进时的自动转向进行了说明,但在拖拉机1(车身3)后退时能够进行自动转向。在进行后退的自动转向的情况下,首先,将配置在驾驶座10的附近的梭动杆91从中立位置向后退侧切换,由此将前进后退切换部13向后退侧切换,驾驶员进行手动转向。与前进同样地,以后退时的车身方位f1与线方位f2的方位差δf3成为规定以下的方式调整自动转向的条件。
144.在前进的自动转向的情况下,驾驶员一边观察设置于驾驶座10的前方的显示装置45一边进行手动转向,以使自动转向的条件齐备。另一方面,在后退的自动转向的情况下,驾驶员一边观察后方一边通过手动转向来调整自动转向的条件,因此,难以观察设置于驾驶座10的前方的显示装置45。因此,拖拉机1具备与配置在驾驶座10的前方的显示装置45分开地告知与自动转向相关的信息的告知装置95。告知装置95由输出音(声音)的扬声器、蜂鸣器、输出光的灯、led等构成。告知装置95在是扬声器、蜂鸣器的情况下,设置在驾驶座10的周围,在是灯、led的情况下,设置在驾驶座10的侧方或后方。
145.告知装置95在自动转向为后退时,通过声音或光来告知自动转向的开始条件是否齐备。例如,如图16的区间t1所示,随着方位差δf3变小,缩短扬声器、蜂鸣器、灯、led的开启(输出)/关闭(停止)的间隔。即,随着方位差δf3变小,在扬声器以及蜂鸣器的情况下缩短输出声音的间隔,在灯以及led的情况下,缩短点亮的间隔。如图16的区间t2所示,在方位差δf3为规定以下且自动转向的条件齐备的情况下,保持扬声器、蜂鸣器、灯、led的开启/关闭的间隔。即,如区间t1、t2所示,告知装置95使自动转向的条件齐备前的声音或光的形态与自动转向的条件齐备后的声音或光的形态不同。如图16的区间t3所示,当开始后退的自动转向时,告知装置95使输出停止(关闭)。
146.需要说明的是,如图18所示,也可以在拖拉机1(车身3)的后部设置与告知装置95不同的告知装置96,将拖拉机1通过自动转向后退的情况告知外部。另外,也可以兼用告知装置95和告知装置96。在兼用的情况下,告知装置95不停止输出。
147.显示装置45在进行自动转向的前进的情况下,例如在登记行驶基准线l1后将梭动杆91切换到前进侧的情况下等,显示用于调整自动转向的开始条件的转弯引导画面m2a。另一方面,在进行自动转向的后退的情况下,例如在登记行驶基准线l1后将梭动杆91切换到后退侧的情况下等,显示装置45至少显示与转弯引导画面m2a不同的画面、例如驾驶画面m1、催促观察后方的画面m5。在画面m5中,例如,由于是后退的自动转向,因此进行请观察后方等的显示。这样,在自动转向的后退中,通过使驾驶员的意识不是朝向显示装置45而是朝向告知装置95,从而提高自动转向的后退的操作性。
148.作业车辆1具备:车身3,所述车身3能够通过由方向盘30进行的手动转向和方向盘30的自动转向中的任一个来行驶;基准登记部150,所述基准登记部150基于通过手动转向而行驶的车身3的位置来登记行驶基准线l1;行驶线设定部201,所述行驶线设定部201能够基于行驶基准线l1来设定自动转向中的多条行驶预定线l2;以及自动转向控制部200,所述自动转向控制部200基于行驶预定线l2进行自动转向的控制,行驶线设定部201能够变更多条行驶预定线l2中的相邻的行驶预定线l2彼此的相邻宽度l10。由此,例如,在一边进行自动转向一边进行作业的状况下,能够根据作业状况等变更相邻宽度l10。例如,在为了进行
防治而需要用于使其他拖拉机(车身)在田地内行驶的通路的情况下,通过与该其他拖拉机的大小相应地增大或减小相邻宽度l10,能够确保与之后的作业对应的通路等。除此之外,在需要部分地变更田垄宽度的情况下等,也能够根据各种状况进行自动转向。
149.作业车辆1具备对相邻宽度l10的变更进行指令的变更操作部件81,行驶线设定部201在由变更操作部件81指令了变更的情况下,变更相邻宽度l10。由此,仅在由驾驶员等通过变更操作部件81发出了变更指令时,能够变更相邻宽度l10。
150.作业车辆1具备对进行了对地作业的作业条数wti进行运算的运算部202,行驶线设定部201基于运算部202运算出的作业条数wti被预先确定的规定条数来变更相邻宽度l10。由此,每当作业条数wti成为规定条数时,能够自动变更相邻宽度l10。
151.作业车辆1具备显示装置45,该显示装置45具有输入行驶预定线l2彼此的基准的相邻宽度即基准相邻宽度l11的基准输入部75和输入变更相邻宽度l12的变更输入部76,行驶线设定部201基于基准相邻宽度l11和变更相邻宽度l12来变更相邻宽度l10。由此,例如能够简单地分别设定基准相邻宽度l11以及变更相邻宽度l12,并且,能够通过基准相邻宽度l11进行自动转向,并且仅在需要变更相邻宽度l10时通过变更相邻宽度l12简单地变更相邻宽度l10。
152.行驶线设定部201在由变更操作部件81指令了变更的情况下,将变更相邻宽度l12与基准相邻宽度l11相加而得到的值变更为相邻宽度l10,在未由变更操作部件81指令变更的情况下,将基准相邻宽度l11设定为相邻宽度l10。由此,例如,能够简单地分别设定基准相邻宽度l11以及变更相邻宽度l12,并且,能够通过基准相邻宽度l11进行自动转向,并且仅在由驾驶员等通过变更操作部件81发出了变更指令时通过变更相邻宽度l12简单地变更相邻宽度l10。
153.行驶线设定部201在运算部202运算出的作业条数wti达到预先确定的规定条数的情况下,将变更相邻宽度l12与基准相邻宽度l11相加而得到的值变更为相邻宽度l10,在作业条数wti未达到规定条数的情况下,将基准相邻宽度l11设定为相邻宽度l10。由此,例如能够简单地分别设定基准相邻宽度l11以及变更相邻宽度l12,并且,能够通过基准相邻宽度l11进行自动转向,并且每当作业条数wti成为规定条数时通过自动变更相邻宽度l12简单地变更相邻宽度l10。
154.作业车辆1具备:第一辅助控制部204,在未变更相邻宽度l10的情况下,在自动转向结束后,所述第一辅助控制部204将车身3自动引导到未变更相邻宽度l10的行驶预定线l2;以及第二辅助控制部205,在变更了相邻宽度l10的情况下,在自动转向结束后,所述第二辅助控制部205将车身3自动引导到变更了相邻宽度l10的行驶预定线l2。由此,不仅能够使作业车辆1容易进入与基准相邻宽度l11对应的行驶预定线l2,还能够使作业车辆1容易进入变更了相邻宽度l10的行驶预定线l2。
155.作业车辆1具备:能够行驶的车身3;设置于车身3并能够连结作业装置的连结部8;能够显示多个设定画面m3的显示装置45,所述多个设定画面m3对包含与关于车身3的设定相关的设定项目70a~70h和设定值71a~71h在内的设定信息进行输入或显示;以及通过第一操作和第二操作的操作来进行设定信息的输入以及多个设定画面m3的切换的输入按钮80。由此,仅通过第一操作和第二操作这两个操作就能够输入包含设定项目70a~70h和设定值71a~71h在内的设定信息,进行设定画面m3的设定。即,能够利用最少的按钮(输入按
钮80)进行画面的切换、设定,不仅能够减少部件数量,而且能够使输入按钮等的空间紧凑。
156.输入按钮80能够对第一操作的按压时间短的短按操作和第二操作的按压时间比第一操作长的长按操作进行操作,显示装置45在是长按操作的情况下,执行多个设定画面m3的切换,并且在切换后的设定画面m3中是短按操作的情况下,执行移动到多个设定项目70a~70h中的规定的设定项目的光标的移动,进而,在光标位于设定项目的项目时是长按操作的情况下,执行规定的设定项目的决定。由此,能够通过长按操作来进行多个设定画面m3的切换以及设定项目70a~70h的决定,能够通过短按操作来选择多个设定项目70a~70h中的规定的设定项目,虽然是一个按钮,但能够提高操作性。
157.显示装置45能够显示与设定画面m3不同的画面,输入按钮80在短按操作的情况下进行其他画面的切换。由此,输入设定信息的设定画面m3以外的画面也能够通过短按操作进行切换,从这一点来看也能够提高操作性。
158.显示装置45在对设定值进行设定的设定画面(详细设定画面m3b2、详细设定画面m3b3)中,在进行了短按操作的情况下执行移动到设定值的多个位数中的规定位的光标k10的移动,在光标k10位于规定位时进行了长按操作的情况下执行规定位的决定,进而,在决定规定位之后进行了短按操作的情况下,变更规定位的数值。由此,在设定具有多个位数的设定值的情况下,能够通过长按操作来决定多个位中的规定位,能够通过短按操作来进行规定位以及数值的变更。即,虽然是一个按钮,但能够通过长按操作和短按操作进行由多个位构成的设定值的设定。
159.车身3能够通过由方向盘30进行的手动转向和方向盘30的自动转向中的任一个来行驶,显示装置45显示与自动转向相关的设定项目70a~70h和设定值71a~71h作为设定信息。由此,不仅能够简单地确认与自动转向相关的设定项目70a~70h和设定值71a~71h,还能够通过输入按钮80简单地进行自动转向的设定值71a~71h的设定。
160.作业车辆1具备基准登记部150、行驶线设定部201以及自动转向控制部200。由此,能够简单地进行行驶基准线l1的设定、行驶预定线l2的设定、自动转向。
161.显示装置45在设定画面m3中,显示将多条行驶预定线l2中的相邻的行驶预定线l2彼此的相邻宽度l10设定为设定值的设定画面m3。由此,通过设定画面m3和输入按钮80的组合,能够简单地进行相邻宽度l10的设定值的显示以及设定。
162.作业车辆1具备:车身3;基准登记部150;自动转向控制部200;在自动转向为前进时显示与自动转向相关的信息的显示装置45;以及在自动转向为后退时与显示装置45分开地告知与自动转向相关的信息的告知装置95。由此,驾驶员在进行前进的自动转向的情况下,能够一边观察显示装置45一边确认与自动转向相关的信息,另一方面,在进行后退的自动转向的情况下,即便不观察显示装置45,也能够通过告知装置95确认与自动转向相关的信息。
163.作业车辆1具备对自动转向的开始或结束进行切换的转向切换开关52,显示装置45在自动转向结束后,在自动转向为前进时显示用于对自动转向的开始条件进行调整的引导画面(转弯引导画面m2a),告知装置95在自动转向为后退时通过声音或光来告知自动转向的开始条件是否齐备。由此,在进行前进的自动转向的情况下,驾驶员能够一边观察引导画面(转弯引导画面m2a)一边对自动转向的开始条件进行调整,另一方面,在进行后退的自动转向的情况下,能够通过声音或光对自动转向的开始条件进行调整。
164.显示装置45根据行驶基准线l1的方位与车身3的方位的方位差δf3,在引导画面(转弯引导画面m2a)中显示自动转向的开始条件齐备的状态。由此,在进行前进的自动转向的情况下,驾驶员能够通过简单地观察引导画面(转弯引导画面m2a)来确认行驶基准线l1的方位与车身3的方位的方位差δf3的状况。
165.告知装置95根据行驶基准线l1的方位与车身3的方位的方位差δf3,通过变更声音或光的形态来告知自动转向的开始条件是否齐备。由此,在进行后退的自动转向的情况下,驾驶员能够通过声音或光简单地确认方位差δf3的状况。
166.显示装置45在自动转向为后退时至少显示与引导画面(转弯引导画面m2a)不同的画面。由此,在驾驶员对后退的自动转向的开始条件进行调整的情况下,能够防止观察前进用的引导画面(转弯引导画面m2a)。
167.显示装置45在自动转向为后退时显示催促观察后方的画面m5。由此,在驾驶员对后退的自动转向的开始条件进行调整的情况下,能够提醒(催促)向后方注意,能够顺畅地进行后退的自动转向。
168.本次公开的实施方式应被理解为在所有方面都是例示而不是限制性的。本发明的范围不是由上述说明来表示,而是由权利要求书来表示,意在包括与权利要求书等同的意思以及范围内的所有变更。
169.在上述实施方式中,设定相邻延长宽度作为变更相邻宽度l12,行驶线设定部201在由变更操作部件81指令了变更的情况下,将变更相邻宽度l12与基准相邻宽度l11相加而得到的值变更为相邻宽度l10,但也可以设定规定的相邻宽度作为变更相邻宽度l12,行驶线设定部201在由变更操作部件81指令了变更的情况下,将变更相邻宽度l12的值变更为相邻宽度l10。
170.附图标记说明
171.1:作业车辆(拖拉机)
172.3:车身
173.30:方向盘
174.45:显示装置
175.46:控制部
176.52:转向切换开关
177.95:告知装置
178.96:告知装置
179.150:基准登记部
180.200:自动转向控制部
181.l1:行驶基准线
182.l2:行驶预定线
183.m2:引导画面
184.δf3:方位差