1.本公开涉及轨道交通领域,具体地,涉及一种转向架、轨道车辆及轨道交通系统。
背景技术:
2.轨道车辆通过转向架实现行进过程中的转向,相关技术中,转向架通常配备有导向轮,通过导向轮与轨道的导向面滚动接触以实现轨道车辆的转向,然而这种机械式和接触式的导向方式,不可避免的会对导向轮造成损伤,长期使用后影响导向的效果,严重时危及行车安全。
技术实现要素:
3.本公开的第一个目的是提供一种能够实现非接触式导向方式的转向架。
4.为了实现上述目的,本公开提供一种转向架,包括:
5.走行轮,包括沿车宽方向间隔设置的两个;
6.至少一个电磁导向装置,设置在两个所述走行轮之间,且与所述走行轮传动连接,所述电磁导向装置与梁导向面之间具有调整间隙;
7.传感元件,设置在所述电磁导向装置的朝向轨道车辆行进方向的前方,用于测量所述传感元件与所述梁导向面之间测量间隙的变化;
8.响应于所述传感元件与所述梁导向面之间测量间隙的变化,所述电磁导向装置能够调整与所述梁导向面之间的调整间隙并迫使所述走行轮发生偏转。
9.可选地,所述电磁导向装置包括沿车宽方向间隔设置的两个,以形成为电磁导向组,两个所述电磁导向装置中的至少一个对应地配置有所述传感元件。
10.可选地,所述电磁导向组包括沿轨道车辆行进方向间隔设置的两组。
11.可选地,所述传感元件和所述电磁导向装置配置成使得所述测量间隙和所述调整间隙具有相同的变化量或者变化量呈线性关系。
12.可选地,所述电磁导向装置包括包覆有绝缘材料的铁芯以及绕设在所述铁芯外部的电磁铁绕组。
13.可选地,所述转向架还包括设置在所述走行轮和所述电磁导向装置之间的转向机构,所述转向机构包括:回转支承组件、导向杆和转向直臂,电磁导向装置和所述传感元件安装在所述回转支承组件的底部,所述导向杆与所述回转支承组件连接,所述转向臂的一端与所述走行轮连接,所述转向直臂的另一端通过所述导向杆与所述回转支承组件连接。
14.可选地,所述电磁导向装置和所述传感元件通过连接构架与所述回转支承组件连接,所述连接构架包括连接支架和安装支架,所述连接支架用于与所述回转支承组件连接,所述安装支架固定设置在所述连接支架上,所述电磁导向装置和所述传感元件设置在所述安装支架上。
15.本公开的第二个目的是提供一种轨道车辆,包括上述的转向架。
16.本公开的第三个目的是提供一种轨道交通系统,包括轨道梁和轨道车辆,所述轨
道梁包括两条沿车宽方向间隔设置的走行轨,所述轨道车辆为上述的轨道车辆。
17.可选地,所述轨道梁为整体呈凹字形的跨座式轨道梁。
18.通过电磁导向装置和传感元件的配合,即,在轨道车辆行进的过程中,响应于传感元件与梁导向面之间测量间隙的变化,电磁导向装置能够调整与梁导向面之间的调整间隙并迫使走行轮发生偏转。在此过程中,电磁导向装置始终与梁导向面保持有间隙,即,电磁导向装置能够通过非接触式的方式实现轨道车辆的转向,避免了机械接触式导向方式对导向轮的损伤。同时,由于传感元件设置在电磁导向装置的朝向行进方向的前方,利于传感元件提前检测到测量间隙的变化,进而提前做出相应的策略反应,电磁导向装置则能够根据实际的情况滞后执行策略。
19.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
20.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
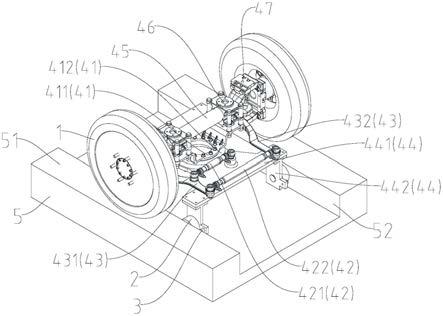
21.图1是本公开示例性实施方式提供的转向架的立体图;
22.图2是图1中转向架的正视图;
23.图3是图1中转向架的俯视图;
24.图4是图1中转向架的侧视图;
25.图5是本公开示例性实施方式提供的导向装置的示意图。
26.附图标记说明
27.1-走行轮,2-电磁导向装置,21-铁芯,22-电磁铁绕组,3-传感元件,41-回转支承组件,411-回转支承安装座,412-回转支承,42-转向杆,421-转向直拉杆,422-转向横拉杆,43-转向直臂,431-左转向直臂,432-右转向直臂,44-连接构架,441-连接支架,442-安装支架,45-桥壳,46-桥壳节叉,47-转向节节叉,48-安装座,5-轨道梁,51-梁顶面,52-梁导向面。
具体实施方式
28.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
29.在本公开中,在未作相反说明的情况下,使用的方位词如“上、下、左、右”是根据相应附图指示的方向进行定义的,而“内”、“外”是指相应部件本身轮廓的内和外。此外,本公开使用的术语“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。
30.如图1至图5所示,本公开提供一种转向架,该转向架能够应用于轨道车辆,并能够在轨道车辆转向的过程中提供导向。本公开提供的轨道车辆适于在具有两条走行轨的轨道梁上行驶。需要解释的是,两条走行轨可以设置在一根轨道梁的两侧,例如,跨座式单轨,或者也可以是两根独立的轨道,此处不作限制。为描述方便,下面以跨座式单轨交通系统为例进行说明。
31.本公开的转向架包括走行轮1、至少一个电磁导向装置2以及传感元件3。其中,走行轮1沿车宽方向间隔设置有两个,用于支承在梁顶面51并能够驱动轨道车辆行走和转向。电磁导向装置2设置在两个走行轮1之间,且与走行轮1传动连接,电磁导向装置2与梁导向面52之间具有调整间隙s1。传感元件3设置在电磁导向装置2的朝向轨道车辆行进方向的前方,用于检测传感元件3与梁导向面52之间的测量间隙s2的变化。响应于传感元件3与梁导向面52之间的测量间隙s2的变化,电磁导向装置2能够调整与梁导向面52之间的调整间隙s1,并迫使走行轮1发生偏转。
32.轨道车辆在直行段正常行驶的过程中,电磁导向装置2与梁导向面52之间具有调整间隙s1应当是保持恒定的。但是即使在直行段,轨道车辆仍然存在不可避免的扰动,使得调整间隙s1发生变化,或者轨道车辆在转向的过程中,由于离心力的存在,调整间隙s1必然发生变化。以图3为例,当轨道车辆右转弯时,轨道车辆整体将向左侧偏移。此时,为使轨道车辆能够回到正常行驶状态或者平稳的转向,需要对已经发生变化的调整间隙s1进行调节,即,使得调整间隙s1回到预设的数值或数值范围内。
33.对调整间隙s1的调节即是对电磁导向装置2的位置的调节,由于走行轮1与电磁导向装置2传动连接,随着电磁导向装置2位置的变动,便能够迫使走行轮1发生偏转,从而使轨道车辆转向。调整间隙s1是否发生变化,或者说调整间隙s1是否偏离预设数值或范围,是通过传感元件3进行检测的。传感元件3可以采用任意能够测量两个物体之间距离的元件,例如,激光测距仪。
34.通过电磁导向装置2和传感元件3的配合,即,在轨道车辆行进的过程中,响应于传感元件3与梁导向面52之间测量间隙s2的变化,电磁导向装置2能够调整与梁导向面52之间的调整间隙s1并迫使所述走行轮1发生偏转。在此过程中,电磁导向装置2始终与梁导向面52保持有间隙,即,电磁导向装置2能够通过非接触式的方式实现轨道车辆的转向,避免了机械接触式导向方式对导向轮的损伤。同时,由于传感元件3设置在电磁导向装置2的朝向行进方向的前方,利于传感元件3提前检测到测量间隙s2的变化,进而提前做出相应的策略反应,电磁导向装置2则能够根据实际的情况滞后执行策略。
35.本公开并不限制电磁导向装置2和传感元件3所选取的数量。例如,转向架可以设置有一个电磁导向装置2,该电磁导向装置2既可以设置在转向架的左侧也可以设置在转向架的右侧。由于两侧走行轨之间的距离以及转向架的尺寸是预设好的,并不会随着车辆的行进而任意改变,因而当传感元件3检测到一侧的测量间隙s2发生变化时,例如间隙变小时,另一侧的间隙必然增大。同样的,测量间隙s2变小,调整间隙s1也将随着变小。此时,可以通过减小电磁导向装置2的电磁力,以重新调节调整间隙s1,使轨道车辆正常行驶。值得注意的是,在转向架只有一侧设置电磁导向装置2和传感元件3的实施方式中,需要保持电磁导向装置2时刻具有磁性。
36.根据本公开的其他实施方式,电磁导向装置2包括沿车宽方向间隔设置的两个,以形成为电磁导向组,两个电磁导向装置2中的至少一个对应地配置有传感元件3。在这一实施方式中,两个电磁导向装置2并非必须时刻保持具有磁性,而是可以根据传感元件3检测的结果决定是否通电以具有磁性。相较于转向架只有一侧设置电磁导向装置2的实施方式,在转向架的两侧均设置电磁导向装置2能够进一步提高轨道车辆导向的精度和力度,反应更加迅速和精准。此外,传感元件3仍然可以只在其中一侧设置,即,仅根据其中一侧的传感
元件3的检测结果能够同时对两侧的电磁导向装置2进行调节,或者,两侧的两个电磁导向装置2均对应地设置有传感元件3,以便提高检测和调节的精度。
37.为了在轨道车辆双向(前后)行驶的过程中均能够实现导向的目的,电磁导向组包括沿轨道车辆行进方向间隔设置的两组。以图3为例,当轨道车辆向前(图3向上)行驶时,分别由电磁导向装置2-1和2-2进行导向,而当轨道车辆反向(图3向下)行驶时,则分别由电磁导向装置2-3和2-4进行导向。两组电磁导向组中,每一组可以对应地配置有一个传感元件3,或者如图3示出的实施方式,每一个电磁导向装置2均对应地配置有传感元件3。
38.传感元件3和电磁导向装置2配置成使得测量间隙s2和调整间隙s1具有相同的变化量或者变化量呈线性关系,这样,轨道车辆的控制元件(图中未示出)便能够根据测量间隙s2的变化换算出调整间隙s1的变化量,或者说是电磁导向装置2的偏移量,以便于进一步调节电磁导向装置2。
39.相较于非线性变化量,线性变化量更容易换算,能够提高控制的精度和速度。此外,也可以将测量间隙s2和调整间隙s1在结构上设置为具有相同的变化量,此时无需经过换算,测量间隙s2的变化量即为调整间隙s1的变化量。测量间隙s2和调整间隙s1变化量之间的关系可以通过对结构的设计而实现,举例来说,电磁导向装置2和传感元件3设置于同一个刚性部件(例如在下面的实施方式中涉及到的连接构架44)上可以实现二者具有相同的变化量。
40.此外,电磁导向装置2可以配置成包括包覆有绝缘材料的铁芯21以及绕设在铁芯21外部的电磁铁绕组22。这种结构相较于传统的电梯结构的电磁铁具有更高的磁力。
41.继续参考图1至图4,本公开的转向架还包括设置在走行轮1和电磁导向装置2之间的转向机构,即,通过转向机构实现走行轮1和电磁导向装置2之间的传动连接。具体的,转向机构包括:回转支承组件41、转向杆42和转向直臂43,电磁导向装置2和传感元件3安装在回转支承组件41的底部,转向杆42与回转支承组件41连接,转向直臂43的一端与走行轮1连接,转向直臂43的另一端通过转向杆42与回转支承组件41连接。可选地,电磁导向装置2和传感元件3通过连接构架44与回转支承组件41连接,电磁导向装置2和传感元件3安装在连接构架44上。
42.上述转向机构的传动链可以描述为:电磁导向装置2通过磁力的改变调整与梁导向面52之间的调整间隙s1,并使得回转支承组件41发生转动,回转支承组件41的转动带动转向杆42进而带动转向直臂43摆动,走行轮1随着转向直臂43的摆动而偏转。
43.回转支承组件41可以进一步包括回转支承安装座411和回转支承412,导向杆42可以进一步包括转向直拉杆421和转向横拉杆422,转向直臂43可以进一步包括左转向直臂431和右转向直臂432,连接构架44可以进一步包括连接支架441和安装支架442,电磁导向装置2和传感元件3设置在安装支架442上。
44.继续参考图1至图4,桥壳45作为承载主体,其两端连接着桥壳节叉46,在桥壳节叉46与桥壳45连接的脖颈部设置有安装座48,桥壳节叉46通过主销与转向节节叉47连接,转向节节叉47与走行轮1连接并以主销为回转中心进行偏转,以实现转向。左转向直臂431和右转向直臂432的一端分别安装在转向节节叉47的下叉臂上,左转向直臂431和右转向直臂432的另一端分别与转向横拉杆422两端的关节球轴承连接,左转向直臂431中间的安装孔与转向直拉杆421的一端的关节球轴承连接,转向直拉杆421另一端的关节球轴承与连接支
架441连接。
45.回转支承412构造为大型圆盘状的轴承,主要用于大型构件的回转,其中,回转支承412的内圈与回转支承安装座411连接,回转支承412的外圈与连接支架441连接。安装座48底部通过螺栓与回转支承安装座411两侧连接。这样,连接构架44能够以回转支承中心作为回转中心,并推动转向直臂43偏转。
46.当轨道车辆在直行段行驶时,理论上电磁导向装置2与梁导向面52之间的调整间隙s1保持不变,但实际上调整间隙s1会有小的波动,传感元件3会测量到测量传感元件3与梁导向面52之间测量间隙s2的变化,并根据调整间隙s1和测量间隙s2之间变化量的线性关系,通过控制电磁铁绕组22的电流以改变电磁导向装置2的电磁力,保证转向架不会发生偏转,轨道车辆直线行驶。
47.当轨道车辆在曲线段行驶时,如图3所示,以轨道车辆向右转向为例,传感元件3-1检测到测量间隙s2减小,传感元件3-2检测到测量间隙s2变大,此时,电磁导向装置2与梁导向面52之间的调整间隙s1也会相应的变化。为使两侧的调整间隙s1恢复预设数值或范围,则增大电磁导向装置2-2的电磁力,减小电磁导向装置2-1的电磁力。由于进入弯道的瞬间,只有传感元件3-1和3-2能够检测到测量间隙s2的变化,因此只需要调节电磁导向装置2-1和2-2的电磁力,此时连接构架44的合力向右。而传感元件3-3和3-4未检测到测量间隙s2的变化,因此电磁导向装置2-3和2-4的电磁力保持不变,此处的力平衡。
48.连接构架44向右偏转,导向力通过转向直拉杆421传递给左转向直臂431,左转向直臂431推动左侧走行轮1向右偏转,同时将转向力通过转向横拉杆422传递给右转向直臂432,并推动右侧的走行轮1向右偏转,以使轨道车辆完成右转向。车辆左转向时工作原理相同,不再赘述。在轨道车辆行进方向,需要依靠一侧电磁导向组2-1、2-2即能够完成转向,此时另一侧的电磁导向组2-3、2-4以及对应的传感元件3-1、3-2停止工作。当轨道车辆反向行驶时,则电磁导向组2-3、2-4以及对应的传感元件3-3、3-4工作。
49.本公开的第二个目的是提供一种轨道车辆,包括上述任一项实施方式的转向架,并具有这些转向架的所有有益效果,此处不再赘述。
50.本公开的第三个目的是提供一种轨道交通系统,包括轨道梁5和轨道车辆,轨道梁5包括两条沿车宽方向间隔设置的走行轨,每一条走行轨均具有用于承载走行轮1的梁顶面51和用于与电磁导向装置2配合以实现导向的梁导向面52。轨道车辆为上述的轨道车辆。可选地,轨道梁5为整体呈凹字形的跨座式轨道梁。跨座式轨道梁为本领域所熟知的梁体,这里不再详细描述其构造。
51.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
52.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
53.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。