1.本发明属于汽车技术领域,具体是一种车外后视镜转向控制系统。
背景技术:
2.目前,汽车后视镜是保证行车安全必不可少的部件,驾驶员在驾驶车辆的过程中,通过后视镜观察周围的情况,从而决定如何正确地驾驶汽车,避免与周围的物体、动物或人相撞。但是当驾驶员的座位调整或者更换驾驶员时,在行车过程中,由于不能随时调整后视镜角度,极其影响车辆的驾驶安全,因此目前亟需提出一种车外后视镜转向控制系统,用于解决上述问题。
技术实现要素:
3.为了解决上述方案存在的问题,本发明提供了一种车外后视镜转向控制系统。
4.本发明的目的可以通过以下技术方案实现:
5.一种车外后视镜转向控制系统,包括空域模块、定位模块、后视镜视角模块、后车镜调整模块和服务器;
6.所述空域模块用于建立汽车的空域坐标系;所述定位模块用于获取驾驶员的视角区,当获得到驾驶员视角坐标区时,生成后视镜视角信号,将后视镜视角信号发送给后视镜视角模块;当后视镜视角模块接收到后视镜视角信号时,获取后视镜调整位置,具体方法包括:
7.获取空域坐标系和驾驶员视角坐标区,识别后视镜坐标,在空域坐标系中标记后视镜坐标和驾驶员视角坐标区,建立后车镜转动视角单元,通过后车镜转动视角单元在空域坐标系中模拟后车镜的视角通道,旋转后车镜视角通道,使得后车镜视角通道包含驾驶员视角坐标区,将后车镜视角通道的旋转步骤标记为后车镜调整步骤;将后车镜调整步骤发送给后车镜调整模块;后车镜调整模块根据接收到的后车镜调整步骤对后车镜进行调整。
8.进一步地,空域模块建立汽车的空域坐标系的方法包括:
9.获取汽车的空间结构,根据汽车的空间结构识别汽车结构的不动点,以不动点中最靠近汽车中心的点为坐标原点,建立空间坐标系,将建立的空间坐标系标记为空域坐标系,在其他不动点中任意选取n个点为校核点,获取校核点的坐标进行保存;
10.设置点位校核单元,点位校核单元用于每隔时间t自动获取当前的校核点坐标,将获取的当前校核点坐标与保存的校核点坐标进行比较,判断校核点的位置是否变动,当判断有m个校核点发生变动时,生成空域坐标系变动信号,重新建立空域坐标系;当判断校核点发生变动的数量低于m个时,重新选取对应数量的不动点作为新的校核点,获取新的校核点的坐标进行保存。
11.进一步地,n为正整数,取值范围为[3,6]。
[0012]
进一步地,t的取值范围为[8,36],单位为小时。
[0013]
进一步地,m为正整数,取值范围为[2,6]。
[0014]
进一步地,定位模块获取驾驶员的视角坐标区的方法包括:
[0015]
设置定位启动开关和若干个图像采集点,当驾驶员需要调整后车镜时,打开定位启动开关,生成定位信号,通过图像采集点获取当前驾驶员在驾驶位上的多张高清图像,建立定位模型,获取空域坐标系,将空域坐标系和当前驾驶员在驾驶位上的多张高清图像输入到定位模型中,获得对应的驾驶员视角坐标区。
[0016]
进一步地,通过后车镜转动视角单元在空域坐标系中模拟后车镜的视角通道的方法包括:
[0017]
获取后车镜型号和尺寸,根据后视镜坐标、后车镜型号和尺寸建立后视镜的三维模型,获取对应型号后车镜的最佳视角范围,识别当前后车镜的最佳视角范围在空域坐标系中的边界坐标,将最佳视角范围的边界在空域坐标系中与后视镜三维模型进行关联,获得在空域坐标系中模拟的后车镜视角通道。
[0018]
进一步地,还包括停车调整模块,所述停车调整模块用于当汽车停车后,识别后车镜是否达到回收要求,具体方法包括:
[0019]
实时识别汽车的行驶状态,行驶状态包括停车熄火状态和其他状态,获取建立有后视镜三维模型的空域坐标系,根据后车镜型号和尺寸获取后车镜的回扫区域,回扫区域即为后车镜在回收过程中,将回扫区域在空域坐标系中进行标记;在回扫区域外设置安全缓冲区;
[0020]
在后车镜上设置转化参照点,获取后车镜高清图像,根据转化参照点,将回扫区域、安全缓冲区和空域坐标系转化到后车镜高清图像中,识别回扫区域和安全缓冲区内是否有障碍物,当识别到回扫区域或安全缓冲区内有障碍物时,发出语音警报声;当识别到回扫区域或安全缓冲区内没有障碍物时,生成回收信号,将回收信号发送给后车镜调整模块,当后车镜调整模块接收到回收信号时,控制住后车镜回收。
[0021]
进一步地,安全缓冲区与回扫区域的标记形式不同。
[0022]
与现有技术相比,本发明的有益效果是:通过建立空域坐标系,并基于空域坐标系进行驾驶员视角坐标区和后车镜视角通道的建立,来进行后车镜的调整,使得当驾驶员感觉后车镜角度户不合适时,可以通过定位启动开关智能化的进行后车镜的调整,实现在不影响驾驶员安全驾驶的条件下对后车镜的调整;通过建立停车调整模块,实现与空域坐标系的相互配合,避免驾驶员停车后,因为忘记回收后车镜而导致后车镜剐蹭事故的发生。
附图说明
[0023]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0024]
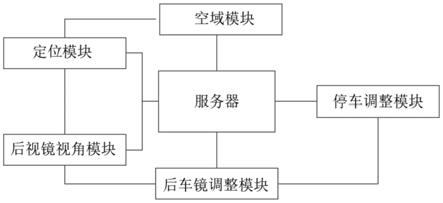
图1为本发明原理框图。
具体实施方式
[0025]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实
施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0026]
如图1所示,一种车外后视镜转向控制系统,包括空域模块、定位模块、后视镜视角模块、后车镜调整模块、停车调整模块和服务器,空域模块、定位模块、后视镜视角模块、后车镜调整模块和停车调整模块均与服务器通信连接;
[0027]
所述空域模块用于建立汽车的空域坐标系,具体方法包括:
[0028]
获取汽车的空间结构,根据汽车的空间结构识别汽车结构的不动点,相当于通过汽车的结构和形状,判断汽车结构中哪些点是不会变动的,可以通过互联网、经验等方式了解到汽车结构中哪些点是不会变动的,以不动点中最靠近汽车中心的点为坐标原点,建立空间坐标系,将建立的空间坐标系标记为空域坐标系,在其他不动点中任意选取n个点为校核点,其中n为正整数,取值范围为[3,6],获取校核点的坐标进行保存;
[0029]
设置点位校核单元,点位校核单元用于每隔时间t自动获取当前的校核点坐标,其中t的取值范围为[8,36],单位为小时;将获取的当前校核点坐标与保存的校核点坐标进行比较,判断校核点的位置是否变动,当判断有m个校核点发生变动时,其中m为正整数,取值范围为[2,6],生成空域坐标系变动信号,重新建立空域坐标系;
[0030]
当判断校核点发生变动的数量低于m个时,重新选取对应数量的不动点作为新的校核点,获取新的校核点的坐标进行保存,原有的变动校核点进行相应的删除;
[0031]
所述定位模块用于获取驾驶员的视角坐标区,即为驾驶员的头部位置,因为通过驾驶员的头部位置即可获得驾驶员的视角区,具体方法包括:
[0032]
设置定位启动开关和若干个图像采集点,图像采集点用于采集驾驶员在驾驶位上的高清图像,高清图像是具有背景的;多个图像采集点是从不同的角度进行图像采集的;当驾驶员需要调整后车镜时,例如:当发生驾驶位座椅位置变动、驾驶员更换、驾驶位座椅靠背倾角变化等变化时,导致后车镜的角度不合适,需要调整,这时就可以打开定位启动开关;打开定位启动开关,生成定位信号,通过图像采集点获取当前驾驶员在驾驶位上的多张高清图像,建立定位模型,获取空域坐标系,将空域坐标系和当前驾驶员在驾驶位上的多张高清图像输入到定位模型中,获得对应的驾驶员视角坐标区;当获得到驾驶员视角坐标区时,生成后视镜视角信号,将后视镜视角信号发送给后视镜视角模块;
[0033]
建立定位模型的方法包括:获取历史定位采集数据,历史定位采集数据包括驾驶员在驾驶位上的多张高清图像和空域坐标系,为历史定位采集数据设置对应的驾驶员视角坐标区,构建人工智能模型;人工智能模型即为神经网络模型;将历史定位采集数据和对应的驾驶员视角坐标区划分为训练集、测试集和校验集;通过训练集、测试集和校验集对人工智能模型进行训练、测试和校验;将训练完成的人工智能模型标记为定位模型。
[0034]
所述后视镜视角模块用于当接收到后视镜视角信号时,获取后视镜调整位置,具体方法包括:
[0035]
获取空域坐标系和驾驶员视角坐标区,识别后视镜坐标,后视镜坐标指的是后视镜转动部的坐标,就是后车镜是绕哪个点进行旋转的,在空域坐标系中标记后视镜坐标和驾驶员视角坐标区,建立后车镜转动视角单元,后车镜转动视角单元用于在空域坐标系中模拟后车镜的视角通道,因为在后车镜不动时,只有在特定的角度才能发挥后车镜的作用,
而这个特定的角度对应的视角通道即为后车镜的视角通道,就是在视角通道内看后车镜,后车镜才能发挥本身的功能;通过后车镜转动视角单元在空域坐标系中模拟后车镜的视角通道,旋转后车镜视角通道,使得后车镜视角通道包含驾驶员视角坐标区,即为驾驶员视角坐标区位于后车镜视角通道内;将后车镜视角通道的旋转步骤标记为后车镜调整步骤;将后车镜调整步骤发送给后车镜调整模块;
[0036]
通过后车镜转动视角单元在空域坐标系中模拟后车镜的视角通道的方法包括:
[0037]
获取后车镜型号和尺寸,根据后视镜坐标、后车镜型号和尺寸建立后视镜的三维模型,获取对应型号后车镜的最佳视角范围,这个可以通过生产厂家或者互联网中进行获取,识别当前后车镜的最佳视角范围在空域坐标系中的边界坐标,将最佳视角范围的边界在空域坐标系中与后视镜三维模型进行关联,获得在空域坐标系中模拟的后车镜视角通道;当后视镜三维模型旋转时,最佳视角范围的边界也会相应的旋转。
[0038]
后车镜调整模块用于根据接收到的信号对后车镜的角度进行调整,当接收到后视镜视角模块发送的后车镜调整步骤时,根据后车镜调整步骤对后车镜进行调整。
[0039]
目前在路边或者停车场可以看到很多的汽车在停车后,后车镜都没有回收回来,极易发生剐蹭现象,为了降低这种事故的发生,当汽车停车熄火后,就需要将后车镜回收。
[0040]
所述停车调整模块用于当汽车停车后,识别后车镜是否可以回收,具体方法包括:
[0041]
实时识别汽车的行驶状态,行驶状态包括停车熄火状态和其他状态,其他状态即为停车熄火状态外的其他状态,例如正在行驶状态、停车但未熄火状态等状态,如何识别汽车的行驶状态是本领域的常用技术,因此在本技术中不进行详细叙述,获取建立有后视镜三维模型的空域坐标系,即为后视镜视角模块中使用的空域坐标系,根据后车镜型号和尺寸获取后车镜的回扫区域,回扫区域即为后车镜在回收过程中,后车镜旋转扫过的区域,将回扫区域在空域坐标系中进行标记;在回扫区域外设置安全缓冲区,因为仅仅通过回扫区域进行判断,还是有可能发生后车镜的擦边现象,因此需要在回扫区域外再设一个安全缓冲区,用来保障后车镜可以安全的回收回来;安全缓冲区的具体范围由专家组进行讨论设置,且安全缓冲区与回扫区域的标记形式不同,可以通过颜色不同来区别标记;
[0042]
在后车镜上设置转化参照点,即为以后车镜上某个定点作为参照点,方便后续坐标转化,可以在后车镜上专门设置一个或多个参照点,当后车镜上没有定点时,可以选取后车镜周边的定点作为参照点;获取后车镜高清图像,根据转化参照点,将回扫区域、安全缓冲区和空域坐标系转化到后车镜高清图像中,识别回扫区域和安全缓冲区内是否有障碍物,具体的如何识别回扫区域和安全缓冲区内是否有障碍物,可以通过建立cnn模型进行判断,还可以使用其他已经公布的识别技术进行判断;当识别到回扫区域或安全缓冲区内有障碍物时,发出语音警报声,提示障碍物离开后车镜范围,还具有提示驾驶员的作用;当识别到回扫区域或安全缓冲区内没有障碍物时,生成回收信号,将回收信号发送给后车镜调整模块,当后车镜调整模块接收到回收信号时,控制住后车镜回收。
[0043]
最后应说明的是,以上实施例仅用以说明本发明的技术方法而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方法进行修改或等同替换,而不脱离本发明技术方法的精神和范围。