1.本发明属于电动汽车传动领域,特别涉及一种四模式双电机耦合电动驱动桥。
背景技术:
2.近年来,为解决传统燃油车的环境污染和高度依赖石油资源等问题,零排放、集成化程度高、响应速度快、控制精准的电动汽车得到了快速发展。但目前国内高性能电动汽车相关技术相比特斯拉等国外电动汽车厂商仍存在一定差距。
3.电动汽车驱动系统,从布置形式上看,主要分为集中式布置和分布式布置两种布置形式:
4.集中式布置主要包括目前普遍使用的单电机电动驱动桥系统和双电机耦合电动驱动桥系统。其中,双电机耦合电动驱动桥系统有双电机转矩耦合和双电机转速耦合两种耦合方案,转矩耦合方案能有效提高汽车的加速和爬坡性能,使汽车具有更好的动力性,转速耦合方案能使电机更多的工作在高效率区间内,使汽车具有更好的行驶经济性。
5.分布式布置则是以轮毂电机独立驱动系统为代表的新型驱动形式。基于分布式驱动形式的转矩定向分配(tv,torque vectoring)技术能在保证汽车稳定性的前提下,通过驱动转矩在左右车轮的定向分配,可以控制汽车的动力学状态,提升汽车的通过性、机动性、操纵性、动力性甚至经济性。相比传统基于差动制动的电子稳定性控制系统(esp/vdc),转矩定向分配技术可以直接对驱动转矩进行控制和分配,能很好的避免动力损失,使汽车具有更好的驾驶乐趣。
6.然而,基于轮毂电机系统实现的分布式布置驱动方案,由于存在轮毂电机功率密度提升受限、簧下质量大、密封和可靠性要求高等问题,目前尚未在乘用车普及应用,仅在商用车上有个别应用案例。因此,集中式布置仍是当前电动汽车的主流布置形式。借鉴轮毂电机系统各轮转矩独立可控的优势,在集中式布置驱动系统的汽车上实现转矩定向分配技术,具有现实应用价值。目前该技术方案在一些高端传统燃油suv汽车上已经有所应用,但受制于高昂的成本和专利保护,普及率不高。此外,目前该技术方案在电动汽车上的应用仍少有报道。因而针对电动汽车设计一款具有转矩定向分配功能的电动驱动桥在当前具有较大的应用价值。
7.发明人前期研发了基于双电机集中布置的转矩定向分配驱动桥系列国际国内发明专利,如专利“带有双排行星齿轮转矩定向分配机构的电动差速器”(cn104675951a),以及“drive axle of electric distribution torque”(us10065489b2),通过在集中式驱动桥上增加一个额外tv电机实现转矩在左右轮的定向分配,相比现有高端传统suv普遍使用的转矩定向分配差速器,具-有能量损失小、控制精确等优势。但是,由于转矩定向分配只应用于有限的转弯工况,大多情况下tv电机处于不工作状态,还会增加驱动桥的搅油损失和新增质量导致的额外能耗。
8.因此,考虑到转矩定向分配技术的应用工况和双电机耦合技术的应用工况存在一定的互补性,使双电机耦合驱动桥能在转矩定向分配功能和双电机耦合功能间进行切换,
将同时获得转矩定向分配与双电机耦合的技术优势,显著提高副驱动电机的利用率,使汽车在各个对应工况下具有更好动力性、经济性、操纵稳定性、机动性和通过性等性能,且驾驶乐趣更佳。该技术方案具有应用于高端电动车的潜力,具有较大的经济价值和社会意义。
技术实现要素:
9.本发明的目的在于提出一种具有转矩定向分配功能的基于双电机耦合构型的电动驱动桥,其具有单电机驱动模式、转矩定向分配驱动模式、双电机转矩耦合驱动模式、双电机转速耦合驱动模式等四种工作模式。通过控制其内部的三个离合器的工作状态,从而控制相关总成的工作模式,所述四模式双电机耦合电动驱动桥能在四种工作模式间切换。
10.当所述四模式双电机耦合电动驱动桥工作在单电机驱动模式时,仅主驱动电机输出功率,汽车能以较小的能耗行驶。
11.当所述四模式双电机耦合电动驱动桥工作在转矩定向分配驱动模式时,在副驱动电机输出转矩的作用下,主驱动电机输出的驱动转矩能在两侧车轮间任意分配,能有效提高汽车的通过性,并能一定程度上提升汽车的机动性、操纵稳定性、动力性甚至经济性并增加汽车的驾驶乐趣。
12.当所述四模式双电机耦合电动驱动桥工作在双电机转矩耦合驱动模式时,主驱动电机与副驱动电机转矩耦合,副驱动电机起到助力电机的作用,两个电机共同驱动汽车行驶。此时所述四模式双电机耦合电动驱动桥的传动比较大。该模式下汽车具有较好的动力性。
13.当所述四模式双电机耦合电动驱动桥工作在双电机转速耦合驱动模式时,主驱动电机与副驱动电机转速耦合,副驱动电机起到调速电机的作用,使主驱动电机能更多的工作在高效区间。此时所述四模式双电机耦合电动驱动桥的传动比较小。该模式下整车驱动效率较高,汽车具有较好的经济性。
14.为实现上述目的,采用如下技术方案:
15.一种四模式双电机耦合电动驱动桥,其特征在于,包括:
16.主驱动电机,其是一个空心轴内转子永磁同步电机,其外壳体定子固定不动,其内转子输出轴用于输出驱动转矩,驱动汽车行驶,是驱动桥的主要动力源。所述主驱动电机产生的动力通过主驱动电机输出轴输出。
17.副驱动电机,其是一个空心轴外转子永磁同步电机,其内定子固定不动,其外壳体转子输出转矩。在单电机驱动模式下,所述副驱动电机不参与驱动;在转矩定向分配驱动模式下,所述副驱动电机输出的转矩可使所述主驱动电机输出的驱动转矩在两侧半轴间任意分配;在双电机转矩耦合驱动模式下,所述副驱动电机作为所述主驱动电机的助力电机共同输出转矩;在双电机转速耦合驱动模式下,所述副驱动电机作为所述主驱动电机的调速电机调节主驱动电机的工作点。所述副驱动电机产生的动力通过副驱动电机外壳体转子输出。
18.主减速器,其主体是一个单排单行星轮行星齿轮机构,用于增大并输出所述主驱动电机产生的转矩。
19.所述主减速器包括第一太阳轮、第一行星轮、第一行星轮轴、第一齿圈和第一行星架。所述第一太阳轮与所述主驱动电机输出轴固定连接。所述第一行星轮与所述第一太阳
轮啮合传动。所述第一行星轮旋转支承在所述第一行星轮轴上。所述第一行星轮轴旋转支承在所述第一行星架上。所述第一齿圈固定不动,但与所述第一行星轮啮合。
20.tv耦合器,其主体是一个双排单行星轮行星齿轮机构,且两级行星排具有相同的特征常数。所述tv耦合器具有断开模式、tv模式和减速器模式等三种工作模式。在断开模式下,其用于切断所述副驱动电机的动力传递;在tv模式下,其用于实现转矩定向分配功能;在减速器模式下,其用于增大并输出所述副驱动电机输出的转矩。
21.所述tv耦合器包括第二行星轮、第二行星轮轴、第二行星架、第二太阳轮、第三太阳轮、第三行星轮、第三行星轮轴、第三行星架、第二齿圈、第一离合器和第二离合器。所述第二行星轮与所述副驱动电机外壳体转子内啮合传动,所述第二行星轮旋转支承在所述第二行星轮轴上。所述第二行星轮轴旋转支承在所述第二行星架上。所述第二太阳轮与所述二行星轮外啮合传动。所述第三太阳轮与所述第二太阳轮固定连接。所述第三行星轮与所述第三太阳轮外啮合传动。所述第三行星轮旋转支承在所述第三行星轮轴上。所述第三行星轮轴旋转支承在所述第三行星架上。所述第二齿圈与所述第三行星轮内啮合传动。所述第一离合器的外圈与所述第二行星架固定连接。所述第二离合器的外圈与所述第二行星架固定连接,内圈与所述第三太阳轮固定连接。
22.优选的是,所述第一离合器、所述第二离合器均选用湿式多片摩擦电磁离合器。
23.动力耦合差速器,其主体是一个双排行星齿轮机构,其第一级行星排是一个单行星轮行星排,其第二级行星排是一个双行星轮行星排且特征常数为2。所述动力耦合差速器具有转矩耦合模式和转速耦合模式两种工作模式。在转矩耦合模式下,其用于接收来自所述主驱动电机和所述副驱动电机的动力并将动力转矩耦合后输出到两侧半轴上;在转速耦合模式下,其用于接收来自所述主驱动电机和所述副驱动电机的动力并将动力转速耦合后输出到两侧半轴上。
24.所述动力耦合差速器包括差速器端盖、差速器壳体、第四太阳轮、第四行星轮、第四行星轮轴、第三齿圈、第五行星轮、第五行星轮轴、第六行星轮、第六行星轮轴、第五太阳轮、第四行星架和第三离合器。所述差速器端盖通过差速器壳体螺钉与所述差速器壳体固定连接。所述差速器端盖与所述第一行星架固定连接。所述第四太阳轮与所述第三行星架固定连接。所述第四行星轮与所述第四太阳轮外啮合传动。所述第四行星轮旋转支承在所述第四行星轮轴上。所述第四行星轮轴旋转支承在所述差速器壳体上。所述第三齿圈与所述第四行星轮内啮合传动。所述第三齿圈旋转支承在所述差速器壳体上。所述第五行星轮与所述第三齿圈内啮合传动。所述第五行星轮旋转支承在所述第五行星轮轴上。所述第五行星轮旋转支承在所述第四行星架上。所述第六行星轮与所述第五行星轮外啮合传动。所述第六行星轮旋转支承在所述第六行星轮轴上。所述第六行星轮轴旋转支承在所述第四行星架上。所述第五太阳轮与所述第六行星轮外啮合传动。所述第三离合器的内圈与所述第四太阳轮固定连接,外圈与所述差速器壳体固定连接。
25.优选的是,所述第三离合器选用湿式多片电磁离合器。
26.所述主驱动电机与所述副驱动电机分别布置在所述动力耦合差速器的两侧。
27.壳体,其用于容置所述四模式双电机耦合电动驱动桥的各总成和零部件。所述壳体包括第一端盖、第一壳体、第二端盖和第二壳体。所述第一端盖通过第一壳体螺钉与所述第一壳体固定连接。所述第一壳体与所述第二壳体通过第二壳体螺钉固定连接。所述第二
端盖通过第三壳体螺钉与所述第二壳体固定连接。
28.所述第一齿圈与所述第一壳体固定连接。所述第二齿圈与所述第二壳体固定连接。所述动力耦合差速器的一端通过圆锥滚子轴承旋转支承在所述第一壳体上,其另一端通过圆锥滚子轴承支承在所述第二壳体上。
29.所述第一离合器的控制信号线与电源线依次穿过所述第一离合器与所述副驱动电机的轴向间隙和所述第二端盖的走线孔与外界连接。所述第二离合器的控制信号线与电源线依次穿过所述第二离合器与所述第二壳体的径向间隙和所述第二壳体的走线孔与外界连接。所述第三离合器的控制信号线与电源线依次穿过所述第三离合器与所述第二壳体的径向间隙和所述第二壳体的走线孔与外界连接。
30.动力输出零部件,其用于通过万向传动装置向两侧车轮输出动力。所述动力输出零部件包括第一半轴、第二半轴、第一法兰和第二法兰。所述第一半轴的一端与所述第五太阳轮花键连接,其另一端与所述第一法兰固定连接。所述第一法兰通过第一法兰螺母轴向固定。所述第二半轴的一端与所述第四行星架花键连接,其另一端与所述第二法兰花键连接。所述第二法兰通过第二法兰螺母轴向固定。
31.所述第一半轴的一端通过滚针轴承旋转支承在所述主驱动电机输出轴上,其另一端通过滚针轴承旋转支承在所述第一壳体上。所述第一法兰与所述第一端盖间通过橡胶密封圈密封。所述第二半轴的一端通过滚针轴承旋转支承在所述第四太阳轮上,其另一端通过滚针轴承旋转支承在所述第二端盖上。所述第二法兰与所述第二端盖间通过橡胶密封圈密封。所述第一离合器的内圈与所述第二半轴固定连接。所述第二太阳轮旋转支承在所述第一半轴上。所述第三太阳轮旋转支承在所述第一半轴上。
32.一种四模式双电机耦合电动驱动桥,其特征还在于,包括:
33.所述四模式双电机耦合电动驱动桥具有单电机驱动模式、转矩定向分配驱动模式、双电机转矩耦合驱动模式和双电机转速耦合驱动模式等四种驱动模式。通过控制所述tv耦合器和所述动力耦合差速器的工作模式,所述四模式双电机耦合电动驱动桥能在四种驱动模式间切换。
34.所述tv耦合器具有断开模式、tv模式和减速器模式等三种工作模式,通过控制所述第一离合器和所述第二离合器的工作状态,所述tv耦合器能在三种工作模式间切换。
35.当所述第一离合器和所述第二离合器均处于断开状态时,所述第二行星架与所述第二半轴、所述第二太阳轮均断开连接,此时所述tv耦合器工作在断开模式时;当所述第一离合器处于接合状态,所述第二离合器处于断开状态时,所述第二行星架与所述第二半轴获得连接,与所述第二太阳轮断开连接,此时所述tv耦合器工作在tv模式;当所述第一离合器处于断开状态,所述第二离合器处于接合状态时,所述第二行星架与所述第二半轴断开连接,与所述第二太阳轮获得连接,此时所述tv耦合器工作在减速器模式。
36.所述动力耦合差速器具有转矩耦合模式和转速耦合模式两种工作模式,通过控制所述第三离合器的工作状态,所述动力耦合差速器能在两种工作模式间切换。
37.当所述第三离合器处于接合状态时,所述差速器壳体与所述第四太阳轮获得连接,此时所述动力耦合差速器工作在转矩耦合模式;当所述第三离合器处于断开状态时,所述差速器壳体与所述第四太阳轮断开连接,此时所述动力耦合差速器工作在转速耦合模式。
38.当所述tv耦合器处于断开模式,所述动力耦合差速器处于转矩耦合模式时,所述四模式双电机耦合电动驱动桥工作在单电机驱动模式,此时汽车由所述主驱动电机单独驱动,所述副驱动电机不参与驱动。
39.在单电机驱动模式下,所述主驱动电机输出的动力通过动力耦合差速器直接传递到两侧半轴上,所述副驱动电机不输出动力。此时,所述第一半轴与所述第二半轴输出的转矩为:其中,t
o1
为所述第一半轴输出的转矩,t
o2
为所述第二半轴输出的转矩,t
i1
为所述主驱动电机输出的转矩,i为所述主减速器的传动比,且i=k1+1,其中k1为所述主减速器的行星排特征常数;所述主驱动电机输出轴、所述第一半轴和所述第二半轴的转速关系为:其中,n
i1
为所述主驱动电机输出轴的转速,n
o1
为所述第一半轴的转速,n
o2
为所述第二半轴的转速。
40.当所述tv耦合器处于tv模式,所述动力耦合差速器处于转矩耦合模式时,所述四模式双电机耦合电动驱动桥工作在转矩定向分配驱动模式,此时汽车由所述主驱动电机单独驱动,所述副驱动电机输出的动力可使所述主驱动电机输出的转矩在两侧半轴间任意分配。
41.在转矩定向分配驱动模式下,所述主驱动电机输出的动力通过动力耦合差速器直接传递到两侧半轴上,所述副驱动电机输出的动力通过tv耦合器使一侧半轴输出的转矩增大,使另一侧半轴输出的转矩减小。此时,所述第一半轴和所述第二半轴输出的转矩为:其中,t
i2
为所述副驱动电机输出的转矩,k2为所述tv耦合器的行星排特征常数;所述主驱动电机输出轴、所述副驱动电机外壳体转子、所述第一半轴和所述第二半轴的转速关系为:其中,n
i2
为所述副驱动电机外壳体转子的转速。
42.在转矩定向分配驱动模式下,所述副驱动电机输出正向转矩时,由定向分配的转矩产生的额外横摆力矩能增大汽车横摆;所述副驱动电机输出负向转矩时,由定向分配的转矩产生的额外横摆力矩能减小汽车横摆。
43.当所述tv耦合器处于减速器模式,所述动力耦合差速器处于转矩耦合模式时,所述四模式双电机耦合电动驱动桥工作在双电机转矩耦合驱动模式,此时所述副驱动电机作为所述主驱动电机的助力电机一同参与驱动汽车。
44.在双电机转矩耦合驱动模式下,所述主驱动电机输出的动力和所述副驱动电机输出的动力经动力耦合差速器转矩耦合后输出到两侧半轴上。此时,所述第一半轴与所述第二半轴输出的转矩为:所述主驱动电机输出轴、所述副驱动电机外壳体转子、所述第一半轴和所述第二半轴的转速关系为:
45.当所述tv耦合器处于减速器模式,所述动力耦合差速器处于转速耦合模式时,所
述四模式双电机耦合电动驱动桥工作在双电机转速耦合驱动模式,此时所述副驱动电机作为所述主驱动电机的调速电机一同参与驱动汽车。
46.在双电机转速耦合驱动模式下,所述主驱动电机输出的动力和所述副驱动电机输出的动力经动力耦合差速器转速耦合后输出到两侧半轴上。此时,所述第一半轴和所述第二半轴输出的转矩为:二半轴输出的转矩为:所述主驱动电机输出轴、所述副驱动电机外壳体转子、所述第一半轴和所述第二半轴的转速关系为:
47.本发明的有益效果是:
48.1.本发明所述的四模式双电机耦合电动驱动桥,有效利用了转矩定向分配技术与双电机耦合技术应用工况的互补性,通过模式切换的手段,提高了副驱动电机的利用率,并能使汽车同时获得转矩定向分配和双电机耦合的技术优势。驱动桥在转矩定向分配驱动模式下实现了驱动转矩在汽车左右车轮间的任意分配,相比传统依靠差动制动的电子稳定性控制系统(esp/vdc)避免了动力损失,有效提高了汽车的动力性、经济性、操纵稳定性和驾驶乐趣;在转矩耦合模式下通过副驱动电机的助力作用使汽车具有更好的加速和爬坡能力,具有更好的动力性;在转速耦合模式下通过副驱动电机的调速作用使主驱动电机更多的工作在高效率区间,有效提高了整车驱动效率,使汽车具有更佳的经济性。
49.2.本发明所述的四模式双电机耦合电动驱动桥,将主驱动电机、副驱动电机、主减速器、tv耦合器和动力耦合差速器集成到一起,同时具备动力输出、传动比变换、模式切换等功能,整体集成度较高、结构紧凑、体积小,可提高汽车的底盘空间利用率,便于底盘的空间布置。
50.3.本发明所述的四模式双电机耦合电动驱动桥,通过tv耦合器实现副驱动电机动力断开、转矩定向分配和减速器的功能,并通过两个电磁离合器实现三种功能的切换。该机构整体集成度较高且模块化程度高,应用前景广阔。
51.4.本发明所述的四模式双电机耦合电动驱动桥,通过动力耦合差速器实现双电机转矩耦合驱动、双电机转速耦合驱动和差速的功能,并通过一个电磁离合器实现两种耦合模式的切换。该机构控制执行元件较少,结构精简控制可靠。
附图说明
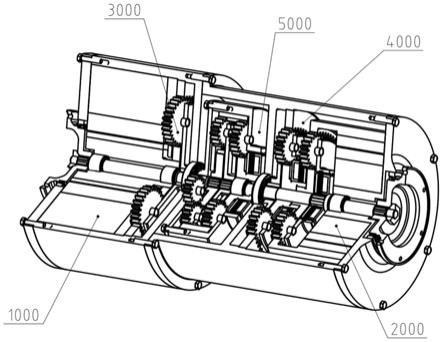
52.图1为本发明所述的四模式双电机耦合电动驱动桥的三维剖视图。
53.图2为本发明所述的四模式双电机耦合电动驱动桥的原理简图。
54.图3为本发明所述的四模式双电机耦合电动驱动桥的结构图。
55.图4为本发明所述的四模式双电机耦合电动驱动桥的主减速器的三维剖视图。
56.图5为本发明所述的四模式双电机耦合电动驱动桥的tv耦合器的三维剖视图。
57.图6为本发明所述的四模式双电机耦合电动驱动桥的动力耦合差速器的三维剖视图。
58.图7为本发明所述的四模式双电机耦合电动驱动桥的离合器走线示意图。
59.图8为本发明所述的四模式双电机耦合电动驱动桥在单电机驱动模式下的转矩流
示意图。
60.图9为本发明所述的四模式双电机耦合电动驱动桥在转矩定向分配驱动模式下的转矩流示意图。
61.图10为本发明所述的四模式双电机耦合电动驱动桥在转矩定向分配驱动模式下的副驱动电机工作象限图。
62.图11为本发明所述的四模式双电机耦合电动驱动桥在双电机转矩耦合驱动模式下的转矩流示意图。
63.图12为本发明所述的四模式双电机耦合电动驱动桥在双电机转速耦合驱动模式下的转矩流示意图。
具体实施方式
64.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
65.下面结合附图给出本发明所述的的一种实施例。
66.如图1、图2、图3所示,一种四模式双电机耦合电动驱动桥,主要由主驱动电机1000、副驱动电机2000、主减速器3000、tv耦合器4000、动力耦合差速器5000、壳体和动力输出零部件组成。其中,主驱动电机1000是一个空心轴内转子永磁同步电机,其外壳体定子与壳体连接固定不动,其内转子输出轴用于输出驱动转矩;主驱动电机1000布置在驱动桥的左侧,通过主驱动电机输出轴1001输出动力;副驱动电机2000是一个空心轴外转子永磁同步电机,其内定子与壳体连接固定不动,其外壳体转子输出转矩;副驱动电机2000布置在驱动桥的右侧,通过副驱动电机外壳体转子2001输出动力。主驱动电机输出轴1001的末端加工有外花键,副驱动电机外壳体转子2001的末端内侧加工有内齿轮。
67.如图1、图3、图4所示,主减速器3000的主体是一个单排单行星轮行星齿轮机构,由第一太阳轮3001、第一行星轮3002、第一行星轮轴3003、第一齿圈3004和第一行星架3005组成。第一太阳轮3001的内孔加工有内花键,与主驱动电机输出轴1001花键连接。第一行星轮3002与第一太阳轮3001啮合传动。第一行星轮3002旋转支承在第一行星轮轴3003上。第一行星轮轴3003旋转支承在第一行星架3005上。第一齿圈3004与壳体连接固定不动,并与第一行星轮3002啮合。
68.需要说明的是,主减速器3000可由多种形式的减速器构成,且不同形式的减速器均可实现相同的功能,因此变换主减速器3000的形式并不视为对本发明的创新。
69.如图1、图3、图5所示,tv耦合器4000的主体是一个双排单行星轮行星齿轮机构,且两级行星排具有相同的特征常数,由第二行星轮4001、第二行星轮轴4002、第二行星架4003、第二太阳轮4004、第三太阳轮4005、第三行星轮4006、第三行星轮轴4007、第三行星架4008、第二齿圈4009、第一离合器4100和第二离合器4200组成。第二行星轮4001与副驱动电机外壳体转子2001内啮合传动。第二行星轮4001旋转支承在第二行星轮轴4002上。第二行星轮轴4002旋转支承在第二行星架4003上。第二太阳轮4004与第二行星轮4001外啮合传动。第二太阳轮4004一端的外侧加工有外花键。第三太阳轮4005一端的内孔加工有内花键,外侧加工有外花键。第三太阳轮4005与第二太阳轮4004花键连接。第三行星轮4006与第三太阳轮4005外啮合传动。第三行星轮4006旋转支承在第三行星轮轴4007上。第三行星轮轴
4007旋转支承在第三行星架4008上。第三行星架4008一侧的内孔加工有内花键。第二齿圈4009与第三行星轮4006内啮合传动。第一离合器4100是一个湿式多片摩擦电磁离合器,其外圈与第二行星架4003花键连接。第二离合器4200是一个湿式多片摩擦电磁离合器,其内圈与第三太阳轮4005花键连接,外圈与第三行星架4008花键连接。
70.需要说明的是,更换第一离合器4100、第二离合器4200的种类或接合方式,并不视为对本发明的创新。
71.如图1、图3、图6所示,动力耦合差速器5000的主体是一个双排行星齿轮机构,其第一级行星排是一个单行星轮行星排,其第二级行星排是一个双行星轮行星排且特征常数为2。动力耦合差速器5000由差速器端盖5001、差速器壳体5002、第四太阳轮5003、第四行星轮5004、第四行星轮轴5005、第三齿圈5006、第五行星轮5007、第五行星轮轴5008、第六行星轮5009、第六行星轮轴5010、第五太阳轮5011、第四行星架5012和第三离合器5100组成。差速器端盖5001通过差速器壳体螺钉5013与差速器壳体5002固定连接。第四太阳轮5003一端的外侧加工有两段外花键。第四太阳轮5003与第三行星架4008花键连接。第四行星轮5004与第四太阳轮5003外啮合传动。第四行星轮5004旋转支承在第四行星轮轴5005上。第四行星轮轴5005旋转支承在差速器壳体5002上。第三齿圈5006旋转支承在差速器壳体5002上,与第四行星轮5004内啮合传动。第五行星轮5007与第三齿圈5006内啮合传动。第五行星轮5007旋转支承在第五行星轮轴5008上。第六行星轮5009与第五行星轮5007外啮合传动。第六行星轮5009旋转支承在第六行星轮轴5010上。第五行星轮轴5008、第六行星轮轴5010均旋转支承在第四行星架5012上。第四行星架5012一侧的内孔加工有内花键。第五太阳轮5011与第六行星轮5009外啮合传动,其内孔加工有内花键。第三离合器5100是一个湿式多片摩擦电磁离合器,其内圈与第三太阳轮5003花键连接,外圈与差速器壳体5002花键连接。
72.需要说明的是,更换第三离合器5100的种类或接合方式,并不视为对本发明的创新。
73.如图1、图3所示,壳体包括第一壳体6001、第二壳体6002、第一端盖6003和第二端盖6004。第一端盖6003通过第一壳体螺钉6005与第一壳体6001固定连接。第一壳体6001与第二壳体6002通过第二壳体螺钉6006固定连接。第二端盖6004通过第三壳体螺钉6007与第二壳体6002固定连接。动力耦合差速器5000左端通过圆锥滚子轴承5200旋转支承在第一壳体6001上,右端通过圆锥滚子轴承5300旋转支承在第二壳体6002上。第一齿圈3004与第一壳体6001过盈连接。第二齿圈4009与第二壳体6002过盈连接。
74.如图1、图3所示,动力输出零部件包括第一半轴7001、第二半轴7002、第一法兰7003和第二法兰7004。第一半轴7001与第二半轴7002的两端均加工有外花键。第一法兰7003与第二法兰7004的内孔均加工有内花键。第一半轴7001的右端与第五太阳轮5011花键连接,其左端与第一法兰7003花键连接。第一法兰7003通过第一法兰螺母7005轴向固定。第二半轴7002的左端与第四行星架5012花键连接,其右端与第二法兰7004花键连接。第二法兰7004通过第二法兰螺母7006轴向固定。第一半轴7001通过滚针轴承7100与滚针轴承7200旋转支承在主驱动电机输出轴1001上。第二半轴7002的左端通过滚针轴承7300旋转支承在第四太阳轮5003上,其右端通过滚针轴承7400旋转支承在第二端盖6004上。第一法兰7003与第一端盖6003之间通过橡胶密封圈7007密封。第二法兰7004与第二端盖6004之间通过橡胶密封圈7008密封。第一离合器4100的内圈与第二半轴7002固定连接。第一太阳轮4004旋
转支承在第一半轴7001上。第二太阳轮4005旋转支承在第一半轴7001上。
75.如图7所示,第一离合器4100的控制信号线与电源线依次穿过第一离合器4100与副驱动电机2000的轴向间隙和第二端盖6004的走线孔与外界连接;第二离合器4200的控制信号线与电源线依次穿过第二离合器4200与第二壳体6002的径向间隙和第二壳体6002的走线孔与外界连接;第三离合器5100的控制信号线与电源线依次穿过第三离合器5100与第二壳体6002的径向间隙和第二壳体6002的走线孔与外界连接。
76.下面结合附图对本发明所述的一种四模式双电机耦合电动驱动桥的工作模式做进一步的详细说明。
77.如下表所示,本发明所述的四模式双电机耦合电动驱动桥,具有单电机驱动模式、转矩定向分配驱动模式、双电机转矩耦合驱动模式和双电机转速耦合驱动模式等四种驱动模式。通过控制tv耦合器4000和动力耦合差速器5000的工作模式,驱动桥能在四种工作模式间切换。tv耦合器4000具有断开模式、tv模式和减速器模式等三种工作模式,通过控制第一离合器4100和第二离合器4200的工作状态,tv耦合器4000能在三种工作模式间切换。动力耦合差速器5000具有转矩耦合模式和转速耦合模式等两种工作模式,通过控制第三离合器5100的工作状态,动力耦合差速器5000能在两种工作模式间切换。在单电机驱动模式下,tv耦合器4000处于断开模式,此时第一离合器4100与第二离合器4200均处于断开状态,动力耦合差速器处于转矩耦合模式,此时第三离合器5100处于接合状态;在转矩定向分配驱动模式下,tv耦合器4000处于tv模式,此时第一离合器4100处于接合状态,第二离合器4200处于断开状态,动力耦合差速器5000处于转矩耦合模式,第三离合器5100处于接合状态;在双电机转矩耦合驱动模式下,tv耦合器4000处于减速器模式,此时第一离合器4100处于断开状态,第二离合器4200处于接合状态,动力耦合差速器5000处于转矩耦合模式,此时第三离合器5100处于接合状态;在双电机转速耦合驱动模式下,tv耦合器4000处于减速器模式,此时第一离合器4100处于断开状态,第二离合器4200处于接合状态,动力耦合差速器5000处于转速耦合模式,此时第三离合器5100处于断开状态。
[0078][0079][0080]
如图8所示,当本发明所述四模式双电机耦合电动驱动桥工作在单电机驱动模式时,主驱动电机1000输出的动力通过动力耦合差速器5000直接传递到第一半轴7001和第二半轴7002上,副驱动电机2000不参与传动。此时,第一半轴7001与第二半轴7002输出的转矩
为:其中,t
o1
为第一半轴7001输出的转矩,t
o2
为第二半轴7002输出的转矩,t
i1
为主驱动电机1000输出的转矩,i为主减速器3000的传动比,且i=k1+1,其中k1为主减速器3000的行星排特征常数;主驱动电机输出轴1001、第一半轴7001和第二半轴7002的转速关系为:其中,n
i1
为主驱动电机输出轴1001的转速,n
o1
为第一半轴7001的转速,n
o2
为第二半轴7002的转速。
[0081]
在单电机驱动模式下,主驱动电机1000作为唯一动力源,在汽车低功率需求的行驶工况下,具有较高的负荷率,从而能更多的工作在高效率区间内。此时整车驱动效率较高,具有良好的经济性。
[0082]
如图9所示,当本发明所述四模式双电机耦合电动驱动桥工作在转矩定向分配驱动模式时,主驱动电机1000输出的动力通过动力耦合差速器5000直接传递到第一半轴7001和第二半轴7002上,副驱动电机2000输出的动力使第一半轴7001输出的转矩减少,使第二半轴7002输出的转矩增大。此时,第一半轴7001和第二半轴7002输出的转矩为:半轴7002输出的转矩增大。此时,第一半轴7001和第二半轴7002输出的转矩为:其中,t
i2
为副驱动电机2000输出的转矩,k2为tv耦合器4000的行星排特征常数;主驱动电机输出轴1001、副驱动电机外壳体转子2001、第一半轴7001和第二半轴7002的转速关系为:2001、第一半轴7001和第二半轴7002的转速关系为:其中n
i2
为副驱动电机外壳体转子2001的转速。
[0083]
下面结合图10对转矩定向分配驱动模式下转矩定向分配的作用效果做进一步说明。
[0084]
作为一种应用场景实施例:
[0085]
当汽车左转时,第一半轴7001的转速小于第二半轴7002,副驱动电机2000正转。此时,若副驱动电机2000输出正向转矩,第一半轴7001输出的转矩将小于第二半轴7002输出的转矩,使得汽车左侧车轮的驱动力小于右侧车轮的驱动力,从而产生一个额外横摆力矩,该横摆力矩与汽车的横摆角速度方向一致,将增大汽车横摆;若副驱动电机2000输出负向转矩,第一半轴7001输出的转矩将大于第二半轴7002输出的转矩,使得汽车左侧车轮的驱动力大于右侧车轮的驱动力,从而产生一个额外的横摆力矩,该横摆力矩与汽车的横摆角速度方向相反,将减小汽车横摆。
[0086]
当汽车右转时,第一半轴7001的转速大于第二半轴7002,副驱动电机2000反转。此时,若副驱动电机2000输出正向转矩,第一半轴7001输出的转矩将大于第二半轴7002输出的转矩,使得汽车左侧车轮的驱动力大于右侧车轮的驱动力,从而产生一个额外的横摆力矩,该横摆力矩与汽车的横摆角速度方向一致,将增大汽车横摆;若副驱动电机2000输出负向转矩,第一半轴7001输出的转矩将小于第二半轴7002输出的转矩,使得汽车左侧车轮的驱动力小于右侧车轮的驱动力,从而产生一个额外的横摆力矩,该横摆力矩与汽车的横摆角速度方向相反,将减小汽车横摆。
[0087]
在该场景下,当副驱动电机2000输出的转矩增大汽车横摆时,能提高汽车的过弯机动性和转向操纵性;当副驱动电机2000输出的转矩减小汽车横摆时,能确保汽车的转向
稳定性,从而提高汽车的主动安全性。
[0088]
作为另一种应用场景实施例:
[0089]
当汽车左侧车轮因陷入泥坑或因驶入冰雪等低附着路面导致车轮打滑时,第一半轴7001的转速大于第二半轴7002的转速,副驱动电机2000正转,此时若副驱动电机2000输出正向转矩,增大第二半轴7002输出的转矩,减小第一半轴7001输出的转矩,将增大汽车右侧车轮的驱动力而减小汽车左侧车轮的驱动力,从而恢复整车驱动力实现脱困;当汽车右侧车轮因陷入泥坑或因驶入冰雪等低附着路面导致车轮打滑时,第二半轴7002的转速大于第一半轴7001的转速,副驱动电机2000反转,此时若副驱动电机2000输出正向转矩,增大第一半轴7001的输出转矩,减小第二半轴7002的输出转矩,将增大汽车左侧车轮的驱动力而减小汽车右侧车轮的驱动力,从而恢复整车驱动力实现脱困。
[0090]
在该场景下,转矩定向分配可显著改善汽车的通过性。
[0091]
如图11所示,当本发明所述四模式双电机耦合电动驱动桥工作在双电机转矩耦合驱动模式时,主驱动电机1000输出的动力和副驱动电机2000输出的动力经动力耦合差速器5000转矩耦合后输出到第一半轴7001和第二半轴7002上。此时,第一半轴7001与第二半轴7002输出的转矩为:7002输出的转矩为:主驱动电机输出轴1001、副驱动电机外壳体转子2001、第一半轴7001和第二半轴7002的转速关系为:
[0092]
在双电机转矩耦合驱动模式下,主驱动电机1000输出的动力与副驱动电机2000输出的动力转矩耦合,共同驱动汽车行驶。此时汽车具有更好的加速能力和爬坡能力,动力性较好,能满足高功率需求的行驶工况。此外,通过主驱动电机1000与副驱动电机2000的合理匹配,利用副驱动电机2000输出的功率对主驱动电机1000输出的功率“削峰填谷”,补充不足功率并吸收多余功率,能减少主驱动电机1000输出功率的波动,使主驱动电机1000能更多的工作在高效区间内,最大化整车驱动效率,改善汽车的经济性。
[0093]
如图12所示,当本发明所述四模式双电机耦合电动驱动桥工作在双电机转速耦合驱动模式时,主驱动电机1000输出的动力与副驱动电机2000输出的动力经动力耦合差速器5000转速耦合后输出到第一半轴7001与第二半轴7002上。此时,第一半轴7001与第二半轴7002输出的转矩为:7002输出的转矩为:主驱动电机输出轴1001、副驱动电机外壳体转子2001、第一半轴7001和第二半轴7002的转速关系为:
[0094]
在双电机转速耦合驱动模式下,主驱动电机1000输出的动力与副驱动电机2000输出的动力转速耦合。此时副驱动电机2000主要工作在发电模式,起到调速电机的作用,能使主驱动电机更多的工作在高效区间并能避免其进入弱磁低效率区间,维持较高的整车驱动效率。此外,副驱动电机2000还能起到无级调速作用,实现电子无级变速,从而在主驱动电机1000的工作点保持在高效率区间的同时实现车速的连续变化,使汽车在高速行驶时具有较高的经济性。
[0095]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列
运用,它完全可以被适用于各种适合本发明的领域,对熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里出与描述的图例。