1.本实用新型涉及光通信技术领域,特别涉及一种夹取装置。
背景技术:
2.随着光模块集成度越来越高,光器件的设计结构尺寸越来越小,在高速光器件生产工艺中,耦合工序逐渐发展成为瓶颈工序。耦合的目的是将发射芯片发出的发散光经过lens聚焦到9um的光纤中或者将9um的光纤的光聚焦到接收芯片中。随着lens的尺寸越来越来小,lens的夹取难度越来越大,传统的lens 夹取采用的是真空吸取或者机械夹持两种方案,前者因为尺寸问题吸力受限,稳定性不足,后者机械夹持角度控制难度大,耦合效率受影响。
3.因此,需要对现有的夹取装置进行改进,以改善夹取稳定性不足和角度控制难度大的问题。
技术实现要素:
4.本实用新型的目的在于提供一种夹取装置,以解决现有的夹取装置夹取稳定性不足和角度控制难度大的问题。
5.为解决上述技术问题,本实用新型提供一种夹取装置,用于夹取透镜,包括支架、吸嘴固定座、吸嘴、平行气爪和两个夹爪,所述吸嘴固定座固定在所述支架上,所述吸嘴固定座用于固定吸嘴,所述吸嘴用于吸取所述透镜,所述平行气爪固定在所述支架上,所述平行气爪具有两个夹持块,一个所述夹持块上固定有一个所述夹爪,所述平行气爪用于通过所述夹持块驱动所述夹爪夹紧所述透镜。
6.可选的,所述夹爪施加给所述透镜的夹紧力垂直于所述吸嘴吸附透镜的吸附力。
7.可选的,所述支架具有第一安装面和第二安装面,所述第一安装面和所述第二安装面垂直设置,所述吸嘴固定座固定在所述第一安装面上,所述吸嘴平行于第一安装面且垂直于第二安装面,所述平行气爪固定在第二安装面上,且所述平行气爪的两个夹持块的移动路径垂直于所述吸嘴的中心轴。
8.可选的,所述吸嘴固定座通过磁吸附的方式固定所述吸嘴。
9.可选的,所述吸嘴固定座具有一平行于第一安装面且垂直于第二安装面的安装通孔,所述夹取装置还包括环状磁体,所述环状磁体设置在所述安装通孔中,所述吸嘴插设在所述环状磁体中,所述环状磁体用于固定所述吸嘴。
10.可选的,所述夹爪包括安装部和夹持部,所述安装部与所述夹持块固定连接,所述安装部与所述夹持部的一端固定连接,所述夹持部的另一端为自由端,所述夹持部的自由端用于夹持所述透镜。
11.可选的,所述夹持部呈片状,且所述夹持部自所述夹持部的一端向所述自由端宽度逐渐变窄。
12.可选的,还包括速度控制阀,所述速度控制阀用于调节所述平行气爪的夹持块的
运动速度和夹紧的力度。
13.本实用新型提供的一种夹取装置,具有以下有益效果:
14.首先,相对于真空吸取或者机械夹持,可有效提高lens的夹取质量,提高耦合效率,降低操作工时。
15.其次,本技术兼顾机械夹持和真空吸取的方案,可满足不同大小、不同重量的lens夹取需求,可适配多款不同产品的设计要求。
16.再次,机械夹持和真空吸取采用小型精密加工方式,多通道lens耦合不会相互干涉,可满足多通道lens耦合,cob平面多通道耦合,box coc深腔多通道耦合,适用性广。
17.然后,可针对不同的耦合设备,通过设计对应的连接夹具实现快速安装,通用性强,可实现lens夹取工装的统一。
附图说明
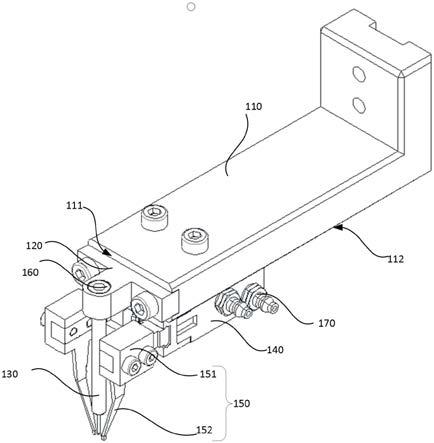
18.图1是本实用新型实施例中夹取装置的结构示意图。
19.附图标记说明:
20.110-支架;111-第一安装面;112-第二安装面;120-吸嘴固定座;130-吸嘴;140-平行气爪;150-夹爪;151-安装部;152-夹持部;160-环状磁体;170-速度控制阀。
具体实施方式
21.以下结合附图和具体实施例对本实用新型提出的夹取装置作进一步详细说明。根据下面说明,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
22.参考图1,图1是本实用新型实施例中夹取装置的结构示意图,本实施例提供一种夹取装置,用于夹取透镜,包括支架110、吸嘴固定座120、吸嘴130、平行气爪140和两个夹爪150。所述吸嘴固定座120固定在所述支架110上,所述吸嘴固定座120用于固定所述吸嘴130,所述吸嘴130用于吸取所述透镜,所述平行气爪140固定在所述支架110上,所述平行气爪140具有两个夹持块,一个所述夹持块上固定有一个所述夹爪150,所述平行气爪140用于通过所述夹持块驱动所述夹爪150夹紧所述透镜。
23.通过设置平行气爪140,并且所述平行气爪140通过所述夹持块驱动所述夹爪150夹紧所述透镜,因此所述透镜可通过机械的方式固定,并且吸嘴130用于吸取透镜,因此透镜可以通过吸附的方式固定,因此所述透镜可同时通过吸附的方式和机械夹取的方式进行固定,机械夹取的方式可弥补吸附的方式稳定性不足的问题,吸附的方式可避免机械夹取的方式夹持角度难控制的问题,由此,本实施例中的夹取装置可解决现有的夹取装置夹取稳定性不足和角度控制难度大的问题,从而提高透镜的耦合效率,降低操作工时。
24.参考图1,本实施例中,所述夹爪150施加给所述透镜的夹紧力垂直于所述吸嘴130吸附透镜的吸附力。
25.具体的,所述支架110具有第一安装面111和第二安装面112,所述第一安装面111和所述第二安装面112垂直设置,所述吸嘴固定座120固定在所述第一安装面111上,所述吸嘴130平行于第一安装面111且垂直于第二安装面112,所述平行气爪140固定在第二安装面112上,且所述平行气爪140的两个夹持块的移动路径垂直于所述吸嘴130的中心轴。
26.所述吸嘴固定座120通过磁吸附的方式固定所述吸嘴130。具体的,所述吸嘴固定座120具有一平行于第一安装面111且垂直于第二安装面112的安装通孔,所述夹取装置还包括环状磁体160,所述环状磁体160设置在所述安装通孔中,所述吸嘴130插设在所述环状磁体160中,所述环状磁体160用于固定所述吸嘴130。
27.所述夹爪150包括安装部151和夹持部152,所述安装部151与所述夹持块固定连接,所述安装部151与所述夹持部152的一端固定连接,所述夹持部152 的另一端为自由端,所述夹持部152的自由端用于夹持所述透镜。
28.参考图1,所述夹持部152呈片状,且所述夹持部152自所述夹持部152 的一端向所述自由端宽度逐渐变窄,如此可使夹爪150具有足够的刚度的同时便于夹紧透镜。
29.所述夹取装置还包括速度控制阀170,所述速度控制阀170用于调节所述平行气爪140的夹持块的运动速度和夹紧的力度,从而调节所述夹持部152的运动速度和夹紧的力度。
30.所述夹取装置的工作过程如下:
31.首先,将待耦合的l ens放置在指定的料盒中;
32.其次,将装配好的夹取装置移动到l ens吸取的第一指定位置;
33.之后,真空打开,吸嘴130吸附l ens,通过工装加工平整度保证l ens吸取角度;
34.然后,吸附完成后,压缩空气控制平行气爪140闭合夹持l ens;
35.然后,耦合设备调节轴移动,将l ens放在第二指定位置直至耦合找到l ens 的最佳位置;
36.其次,耦合完成后,夹取装置夹持l ens移动到第三指定位置;
37.之后,待点胶完成后,夹取装置夹持l ens回到最佳位置,uv固化;
38.最后,固化完成后,真空断开,压缩空气控制气爪打开,更换l ens进行下一通道耦合。
39.相比于现有技术,本技术具有如下优点:
40.首先,相对于真空吸取或者机械夹持,可有效提高lens的夹取质量,提高耦合效率,降低操作工时。
41.其次,本技术兼顾机械夹持和真空吸取的方案,可满足不同大小、不同重量的lens夹取需求,可适配多款不同产品的设计要求。
42.再次,机械夹持和真空吸取采用小型精密加工方式,多通道lens耦合不会相互干涉,可满足多通道lens耦合,cob平面多通道耦合,适用性广。
43.然后,可针对不同的耦合设备,通过设计对应的连接夹具实现快速安装,通用性强,可实现lens夹取工装的统一。
44.上述描述仅是对本实用新型较佳实施例的描述,并非对本实用新型范围的任何限定,本实用新型领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。