用于在单辙机动车辆中执行自主制动的方法和装置
背景技术:
1.未提前公开的de 10 2018 221 720.3涉及一种用于在单辙机动车辆中执行自主制动的方法,其中,
‑ꢀ
借助于环境传感装置来探测车辆减速的必要性,
‑ꢀ
据此开始不依赖于驾驶员的车辆减速,
‑ꢀ
在开始所述车辆减速之后,求取表征驾驶员针对掌控车辆减速操作的准备的驾驶员准备参量,并且
‑ꢀ
根据所述驾驶员准备参量来继续所述车辆减速的时间上的变化曲线。
技术实现要素:
2.本发明涉及一种用于在单辙机动车辆中执行不依赖于驾驶员的或者自主的制动的方法,其中,
‑ꢀ
借助于环境传感装置来探测不依赖于驾驶员的车辆减速或者不依赖于驾驶员的制动或者自主制动的必要性,
‑ꢀ
在存在车辆减速的必要性的情况下,在执行所述车辆减速之前以预先给定的时间长度来执行不依赖于驾驶员的测试制动过程,
‑ꢀ
在执行所述测试制动过程的期间或之后,求取表征驾驶员针对掌控被探测为必要的车辆减速的准备的驾驶员准备参量,并且
‑ꢀ
在结束所述测试制动过程之后开始所述不依赖于驾驶员的车辆减速,其中,所述车辆减速的时间上的变化曲线依赖于所述驾驶员准备参量。
3.本发明允许在两轮车的自动的紧急制动时降低危险。未准备好制动的并且分心的驾驶员在这样的情况中可能完全失去对于两轮车的控制,因此将表征驾驶员针对掌控车辆减速操作的准备的驾驶员准备参量包含到自动的制动操作或者紧急制动操作中是有意义的。所述测试制动过程引起短时间的减速并且如此设计,使得其即使在缺少驾驶员的身体上的制动准备时、例如在朝旁边看时或者在单手驾驶时也是不危急的。所述测试制动过程通过马达力矩降低或者通过在提高摩托车的一个车轮或者两个车轮处的制动力矩同时进行马达力矩降低来实现。所述测试制动过程仅仅在短时间里起作用并且仅仅略微使摩托车减速。所述测试制动过程对注意力不集中的或者分心的驾驶员来说作为驾驶员警告起作用并且因此也能够被称为警告冲击(warnruck)。
4.本发明的一种有利的设计方案特征在于,所述环境传感装置是雷达传感装置、激光雷达传感装置或者视频传感装置。这样的传感装置在轿车领域内已经得到广泛推广并且能够在两轮车领域内一同使用。
5.本发明的一种有利的设计方案特征在于,所述驾驶员准备参量能够具有至少两个不同的数值。
6.本发明的一种有利的设计方案特征在于,所述驾驶员准备参量能够具有两个数值,其中,
‑ꢀ
所述两个数值中的一个数值表示驾驶员的针对车辆减速操作准备好的状态,
‑ꢀ
所述两个数值中的另一个数值表示驾驶员的针对车辆减速操作未准备好的状态。
7.本发明的一种有利的设计方案特征在于,
‑ꢀ
在驾驶员的准备好的状态的情况下,利用所计划的目标制动力变化曲线来执行自主制动;
‑ꢀ
在驾驶员的未准备好的状态的情况下利用下述制动力变化曲线来执行,所述制动力变化曲线与在驾驶员的准备好的状态的情况下的制动力变化曲线相比具有较小的减速和/或较小的冲击。
8.通过在被识别为未准备好的驾驶员状态的情况下执行具有较低的强度的紧急制动,能够降低驾驶员的由于对两轮车失去控制而倾倒的风险。尽管如此,通过较弱的紧急制动将分心的驾驶员的注意力引到当前的行驶情况上,因为所述紧急制动同时作为驾驶员警告起作用。
9.本发明的一种有利的设计方案特征在于,在开始所述测试制动过程之后根据被安置在机动车辆处的惯性传感装置的输出信号来求取所述驾驶员准备参量。
10.本发明的一种有利的设计方案特征在于,在开始所述测试制动过程之后根据转向角和/或转向力矩来求取所述驾驶员准备参量。
11.本发明的一种有利的设计方案特征在于,在开始所述测试制动过程之后根据被安置在机动车辆处的压力敏感的接触传感器的输出信号来求取所述驾驶员准备参量。
12.本发明的一种有利的设计方案特征在于,在开始所述测试制动过程之后根据车轮转速传感器或弹簧行程传感器的输出信号来求取所述驾驶员准备参量。
13.此外,本发明包括一种装置,该装置包括被设计用于执行按照本发明的方法的器件。在此尤其涉及到一种控制器,在所述控制器中保存有用于执行按照本发明的方法的程序代码。
附图说明
14.附图包括图1到3。其中:在图1中示出了本发明的一种设计方案的时间上的流程;在图2中示出了针对三种状态的状态图表,其中,两种状态是驾驶员状态;在图3中示出了摩托车的示意性的侧视图,所述摩托车具有重要的对本发明来说能够利用的摩托车组件。
具体实施方式
15.用于摩托车驾驶员的较高水平的辅助系统的不断的研发以对驾驶员状态的精确认知为前提。因此,如果例如要开始自动制动,驾驶员就必须对此作好准备。这尤其以身体上的准备为前提。对于完整的控制来说,对摩托车的双手的驾驶是必要的。借助于合适的传感装置,能够在已经触发的制动操作的期间识别出这种准备、例如驾驶员是否将双手放在把手上。
16.与在轿车中一样,对于摩托车来说也能够认为,在自动的紧急制动之前输出警告。
用于显示所面临的碰撞危险的警告冲击连同必要时紧随的自动的紧急制动对摩托车来说显得特别合适,因为与以轿车的行驶相反在摩托车行驶中更加难以察觉到尤其光学的、然而也声学的警告信号。
17.本发明包括利用已经处于车辆处的传感器对在警告冲击的期间的、驾驶员状态和因此摩托车驾驶员对接下来的自动的紧急制动的身体上的制动准备进行识别。所述自动的紧急制动的触发和特征或者强度根据所识别的驾驶员状态来实现。
18.借助于向前观察的环境传感装置能够检测环境并且识别所面临的碰撞。为了在自动的紧急制动之前向驾驶员显示所面临的碰撞而触发警告冲击。所述警告冲击相应于短时间的减速并且如此设计,使得其即使在缺少驾驶员的身体上的制动准备时、例如在朝旁边看或者单手驾驶时也是不危急的。所述警告冲击通过马达力矩降低或者通过在提高在摩托车的一个或者两个车轮处的制动力矩同时进行马达力矩降低来实现。所述警告冲击仅仅在短时间里起作用并且仅仅略微使摩托车减速。
19.本发明包括通过测量总系统对警告冲击的反应来对驾驶员的状态进行建模。在第一步骤中,例如能够从惯性传感装置的测量中推导出驾驶员的制动准备。如果驾驶员例如在由于警告冲击而进行的短时间的减速期间仅仅一只手放在把手处,那么驾驶员的支撑力矩引起把手运动。这种运动引起总系统的动态的变化,所述变化利用惯性测量技术来进行记录。由此能够推断出,驾驶员针对随后所设置的名义上的自动的紧急制动操作未准备好。
20.借助于惯性传感装置,能够以理想的方式测量出摩托车在所有三个空间方向中的旋转速率和减速。但是,本发明的实施方式也能够仅仅使用单个的惯性信号;
‑ꢀ
在本发明的一种构造方式中,用于进行驾驶员状态识别的模型仅仅利用所测量的滚动速率、也就是围绕着摩托车的车辆纵轴线的旋转速率;
‑ꢀ
一种构造方式在用于进行驾驶员状态识别的模型中除了车辆滚动速率之外还利用车辆偏转速率、也就是车辆围绕着竖轴线的转动;
‑ꢀ
另一种构造方式利用车辆滚动速率、车辆偏转速率和横向加速度。
21.为了对在警告冲击期间的驾驶员状态进行识别,在另一种构造方式中除了惯性传感装置的信号之外还分析转向角传感器的信号。
22.为了除此以外对用于识别驾驶员状态的所述模型进行扩展,能够分析额外的传感器:
‑ꢀ
用于对转向反应进行测量的转向力矩传感器;
‑ꢀ
用于对车辆的俯仰运动进行测量的弹簧行程传感装置;
‑ꢀ
车轮转速传感器;
‑ꢀ
用于对在接触点、例如把手、膝盖或脚处的支撑的程度进行测量的压力敏感的接触传感器。
23.根据所识别到的驾驶员状态,在必要时触发随后的自动的紧急制动。如果识别出驾驶员状态“针对制动准备好”,则进行名义上的自动的紧急制动。如果识别出驾驶员状态“未准备好制动”,则触发带有经过适配的减速的自动制动,使得所述自动制动在驾驶员的未准备好制动的状态的情况下也不危急。因此,在经过适配的制动的一种实施方案中能够相对于标称值来降低所述减速的量值。在另一种实施方案中同样能够降低所述冲击、也就是减速构建的梯度。
24.驾驶员的模型例如能够如在图2中所示出的那样包括三种状态。在那里,方框200表征状态“中性”,方框201表征状态“针对操作未准备好”,并且方框202表征状态“针对操作准备好”。在此应当注意,所述状态“针对操作准备好”是在驾驶员状态被求取之前所具有的状态,所述驾驶员状态要么能够具有状况“针对操作准备好”要么能够具有状况“针对操作未准备好”。
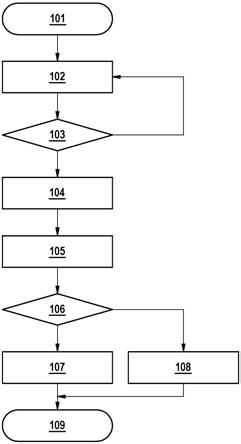
25.图1示出了本发明的一种设计方案的时间上的流程。在方框101中开始所述方法之后,在方框102中执行环境检测。随后在方框103中求取,是否需要自动制动或者紧急制动。如果是这种情况,则在方框104中执行不依赖于驾驶员的警告冲击或者测试制动过程。如果不需要制动,则由方框103返回到方框102。根据在警告冲击的期间所采集到的数据,在方框105中借助于驾驶员状态模型来求取驾驶员针对掌控必需的自动制动的当前的准备。据此在方框106中通过所述制动的进一步的变化曲线进行决定。在图1中,为此示例性地使用两种可能的时间上的制动力变化曲线。如果所述驾驶员状态被求取为准备好制动,则在方框107中如所计划的那样执行自动制动。反之,如果所述驾驶员状态被求取为未准备好制动,则在方框108中仅仅以减弱的形式来执行自动制动。在方框109中结束所述方法。
26.图2以状态图的形式示例性地示出了以下状态:方框200:状态中性方框201:驾驶员状态“针对自动的制动操作未准备好”方框202:驾驶员状态“针对自动的制动操作准备好”。
27.这三种状态之间的指向两侧的箭头连接表明,当所述驾驶员状态在自动的制动操作的期间变化时也能够在不同的状态之间进行转变。
28.在图3中示出了摩托车的示意性的侧视图,所述摩托车具有以下重要的、能够用于本发明的摩托车组件;301:后轮制动器302:后轮处的弹簧行程传感器303:制动控制器304:马达控制器305:前轮制动器306:前轮处的车轮转速传感器307:前轮处的弹簧行程传感器308:环境传感器309:转向角传感器310:转向力矩传感器311:用于驾驶员状态的分析单元312:惯性测量技术313:前轮处的车轮转速传感器。