1.本发明涉及自动驾驶控制技术领域,特别涉及一种无人清扫车的智能充电调度方法和调度系统。
背景技术:
2.现有无人清扫车主要是进行单车控制,其控制逻辑比较简单。控制原理为实时监控车辆的实际电量,当监控到实际电量低于某个阈值时,自动行驶到充电区域进行充电。这样的技术方案虽然可以保障车辆不会出现电池完全放电的情况,不会导致车辆停工以及对电池的伤害。但是目前的充电技术无法实现快速充电,那么在无人清扫车进行充电的过程中,其待清扫区域无法进行清扫。即便调度其他无人清扫车过来进行清扫,也需要花费较长的时间,大大影响了无人清扫车的清扫效率。
3.其技术缺点如下:1、未对区域内车辆进行统一管理,可能会出现排队充电的情况;2、仅通过剩余电量来判断是否需要充电,可能会出现任务执行中需要中断任务进行充电的情况,影响清扫任务的正常执行。
技术实现要素:
4.本发明主要目的在于提供一种无人清扫车调度方法及系统。通过在初始状态下的电量估算制定控制策略,调度适配的无人清扫车对适配区域执行清扫任务。并且在运行过程中实时监控各辆无人清扫车的实时剩余电量,及时对无人清扫车辆电量不足的情况进行处理,并协同调度其他无人清扫车辆进行协助,保证了清扫效率。其具体技术方案如下所述:作为第一方面,本发明提供了一种无人清扫车的智能充电调度方法,所述步骤包括:s1,将无人清扫车的剩余电量记为socn,分别获取n辆无人清扫车的当前位置及剩余电量socn,将剩余电量及当前位置发送至云端服务器;s2,云端服务器统计当前x个待清扫区域的面积,依据预设的每平方米清扫区域的耗电量,根据待清扫区域的面积可计算得知清扫完成每个待清扫区域所需的电量,记为s_socx;s3,统计每辆无人清扫车分别与x个待清扫区域的距离,获取预设的无人清扫车每行驶单位距离所消耗的电量,计算得出每辆无人清扫车从当前位置行驶到每个待清扫区域所消耗的电量,记为s_socn-x;s4,统计每辆无人清扫车分别从x个待清扫区域到垃圾倾倒点再回到充电桩的距离,获取无人清扫车每行驶单位距离消耗的电量,计算得出每个待清扫区域到垃圾倾倒点再返回充电桩所消耗的电量,记为d_socn;s5,给每辆无人清扫车分配包含指定待清扫区域的清扫任务,并计算无人清扫车
完成从启动到开始清扫指定的待清扫区域再至返回充电桩的整个过程后的剩余电量l_socn-x=socn-s_socn-x-d_socn;将l_socn-x与预设的最低充电电量为socmin进行比较,若l_socn-x>socmin时,则无人清扫车执行清扫任务,当l_socn-x≤socmin时,则执行步骤s6;s6,遍历除s5中所述指定待清扫区域外的剩余待清扫区域,分别计算无人清扫车完成从启动到开始清扫每个剩余待清扫区域再至返回充电桩的整个过程后的剩余电量l_socn-x,将每个剩余待清扫区域的l_socn-x与预设的最低充电电量为socmin进行比较,若某个剩余清扫区域的l_socn-x>socmin时,将该无人清扫车的清扫任务中的原待清扫区域修改为所述的某个剩余清扫区域;若遍历剩余待清扫区域后,每个剩余待清扫区域的l_socn-x均小于或等于socmin时,则对该无人清扫车发出充电指令,并将所述清扫任务分配至其他无人清扫车。
5.结合第一方面,在其可能发生的任意一种情况下的第一种情况为,在清扫任务执行过程中,同步实时监控剩余电量socn,当实时监控到l_socn-x=socn-d_socn小于socmin时,则对该无人清扫车发出充电指令,且同步将该无人清扫车执行该待清扫区域所需电量值s_socx进行修正,调度其他无人清扫车完成剩余清扫任务。
6.结合第一方面或上述第一种情况,在其可能发生的任意一种情况下的第二种情况为,所述修正的方法为:分别记录下无人清扫车在第x个待清扫区域准备时的剩余电量一及实时监控到l_socn-x=socn-d_socn小于socmin时的无人清扫车剩余电量二,计算其差值;当实时监控到l_socn-x=socn-d_socn小于socmin时,获取当前无人清扫车在第x个待清扫区域内的行驶距离;调取无人清扫车的有效清扫面积参数,结合行驶距离,计算得出当前无人清扫车的已清扫面积;根据已清扫面积和差值,计算得出第x个待清扫区域的实际每平方米区域清扫所需电量的参数值,并将该参数值赋值给s_socx,完成修正。
7.结合第一方面或上述第一、二种情况,在其可能发生的任意一种情况下的第三种情况为,当步骤s6中若多个剩余清扫区域的l_socn-x>socmin时,计算l_socn-x与socmin的差值,并获取其差值中的最小差值所对应的剩余清扫区域,将该无人清扫车的清扫任务中的原待清扫区域修改为所述的最小差值所对应的剩余清扫区域。
8.作为第二方面,本发明公开了一种无人清扫车的智能充电调度系统,所述系统包括云端服务器、无人清扫车,其中:云端服务器,用于该系统的中央控制单元,实时获取无人清扫车的车辆状态以及充电桩空闲工作状态,执行上述的任意一项方法,并向无人清扫车下发控制指令;无人清扫车,用于根据云端服务器下发的控制指令进行自动驾驶、清扫及充电。
9.结合第二方面,在其可能发生的任意种情况下的第三种情况为,所述无人清扫车包括obu车载单元、电池监测模块、定位模块和中央处理模块,其中:obu车载单元,用于实现中央处理模块与云端服务器直接的数据通信连接;电池监测模块,用于实时监控无人清扫车的剩余电量;定位模块,用于实时监控无人清扫车的位置信息,并记录其运行轨迹和行驶距离;
中央处理模块,用于根据云端服务器下发的操作指令对无人清扫车进行控制。
10.结合第二方面或上述第三种情况,在其可能发生的任意种情况下的第四种情况为,所述云端服务器包括第一存储单元、第二存储单元和运算单元,其中:所述第一存储单元存储实现上述的任意一项方法的计算机程序指令;所述第二存储单元存储n辆无人清扫车的当前位置及剩余电量socn、运算单元计算得出的完成每个待清扫区域所需的电量s_socx、运算单元计算得出的每辆无人清扫车从当前位置行驶到每个待清扫区域所消耗的电量s_socn-x、运算单元计算得出的每个待清扫区域到垃圾倾倒点再返回充电桩所消耗的电量d_socn、清扫任务、运算单元计算得出的无人清扫车完成从启动到开始清扫指定的待清扫区域再至返回充电桩的整个过程后的剩余电量l_socn-x、最低充电电量socmin、无人清扫车的实时剩余电量、无人清扫车的有效清扫面积参数、无人清扫车在待清扫区域内的行驶距离;运算单元,用于调取第一存储单元和第二存储单元内存储的计算机程序指令和存储数据进行运算,输出运算结果。
11.作为第三方面,本发明提供了一种无人清扫车,安装有底盘、充电接口、动力驱动装置、电池组,所述无人清扫车还安装有上述的obu车载单元、电池监测装置、定位装置和中央处理器。
12.本发明的有益效果是:1、对区域内所有车辆进行统一调度,可以根据车辆的属于电量进行任务调度,保证电量的最大限度使用;2、根据车辆剩余电量即将执行的任务的消耗电量,进行充电管理,保证了单次任务的完整执行;3、对区域内车辆进行统一调度,可以避免出现排队充电的情况,提高充电效率。
附图说明
13.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
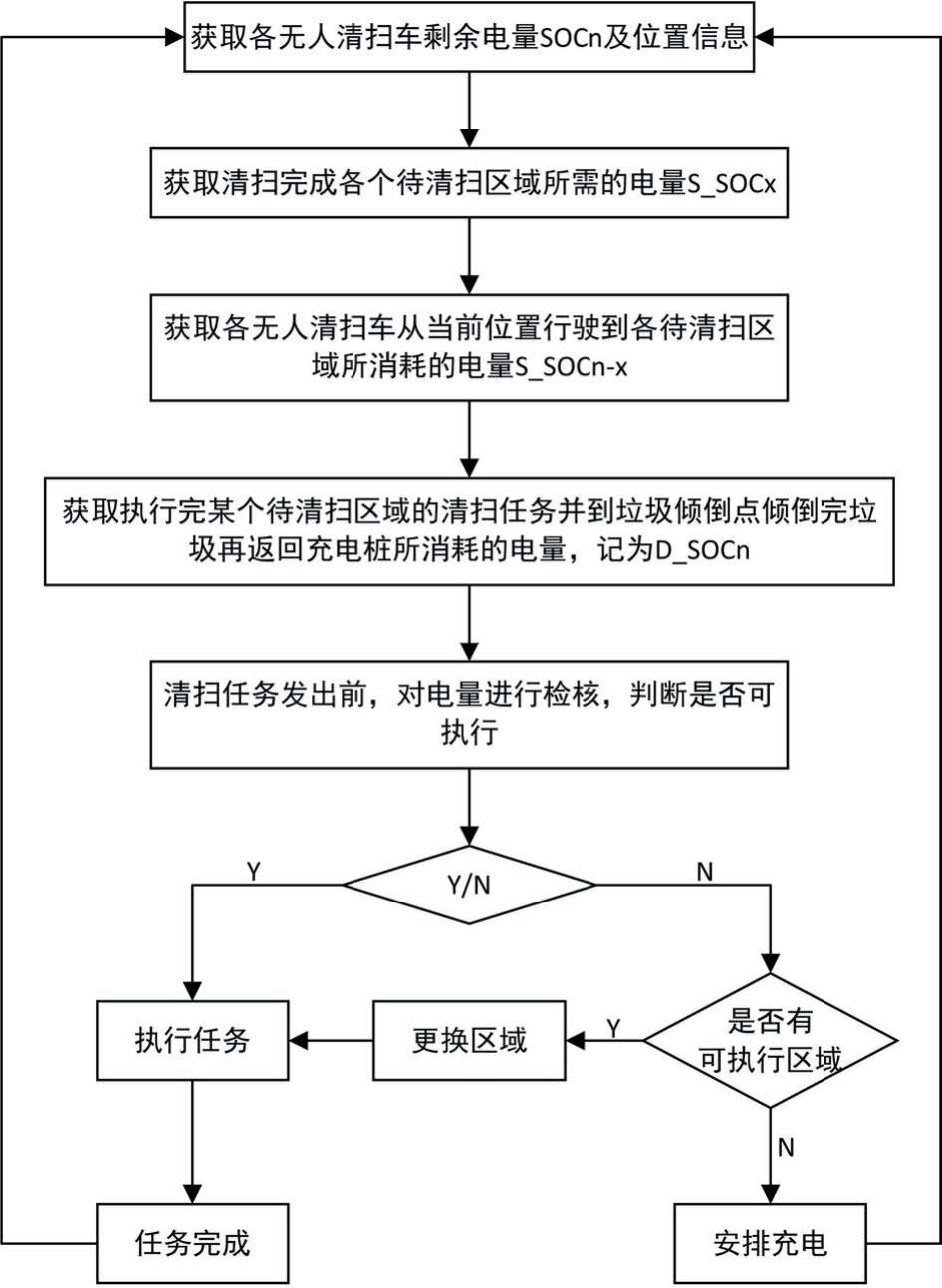
14.图1为本发明的步骤流程图;图2为本发明的第一轮任务所需电量参数对应表;图3为本发明的第二轮任务所需电量参数对应表;图4为本发明的第三轮任务所需电量参数对应表;图5为本发明的系统结构示意图。
具体实施方式
15.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。显然,所描述的实施例仅仅是本发明的部分实施例。
16.实施例1
如图1所示,本实施例提供了一种无人清扫车的智能充电调度方法,所述步骤包括:每一轮任务开始前,无人清扫车向云端发送剩余电量,记为socn,n为车号,假如该区域有3台车,则n=1,2,3。则soc1为1号无人清扫车当前剩余电量。并将当前位置发送给云端。
17.云端统计当前待清扫区域面积。通过查表,可获得每平方米待清扫区域的耗电量,则根据待清扫区域的面积可计算得知清扫完成待清扫区域所需的电量,用s_socx表示,假如该地区有3个待清扫区域,s_soc1表示1号待清扫区域清扫完成预计消耗的电量。
18.云端统计当前车辆与待清扫区域的距离。通过查表,可获得无人清扫车每行驶1千米消耗的电量,则根据各无人清扫车当前位置以及与待清扫区域的距离可计算得知无人清扫车从当前位置行驶到待清扫区域所消耗的电量,记为s_socn-x,s_soc
1-2
指1号车行驶到2号清扫区域所需的电量。
19.云端统计无人清扫车从待清扫区域到垃圾倾倒点倒完垃圾再回到充电桩的距离。通过查表,可获得无人清扫车每行驶1千米消耗的电量,则根据各待清扫区域到垃圾倾倒点的距离及垃圾倾倒点到充电桩的距离,可知无人清扫车在执行完某个待清扫区域的清扫任务并到垃圾倾倒点倾倒完垃圾再返回充电桩所消耗的电量,记为d_socn,d_soc1是指清扫完1号待清扫区域并倾倒垃圾回到充电桩所需电量。
20.预设每台车最低充电电量为socmin,正常情况下,云端按照既有算法进行任务调度,每个清扫任务发出前,对电量进行检核,具体为:假如1号车清扫1号待清扫区域,则任务发出前需要判断:l_soc
1-1
=soc1-s_soc
1-1
-d_soc1,当l_soc
1-1
》socmin时,可执行任务。反之,则不能执行当前任务,此时需要遍历各剩余待清扫区域,即计算soc1-s_soc
1-2
-d_soc2,soc1-s_soc
1-3
-d_soc3。那么可能会出现以下3种情况:情况1,若剩余的每个待清扫区域的l_socn-x都小于或等于socmin,则对该车辆发出充电指令,其分配给该无人清扫车的清扫任务转发由其他无人清扫车完成该待清扫区域的清扫任务。
21.情况2,若剩余的待清扫区域中有至少2个待清扫区域的l_socn-x都大于socmin,则计算l_socn-x与socmin的差值,并获取其差值中的最小差值所对应的剩余清扫区域,将该无人清扫车的清扫任务中的原待清扫区域修改为所述的最小差值所对应的剩余待清扫区域,并执行清扫任务。
22.情况3,若剩余的待清扫区域中仅有1个待清扫区域的l_socn-x大于socmin,则将该无人清扫车的清扫任务中的原待清扫区域修改为该仅有的1个剩余待清扫区域,并执行清扫任务。
23.本发明中的每辆无人清扫车在任务执行前,都同样遵循上述步骤。
24.在清扫任务执行过程中,同步实时监控剩余电量,当l_socn-x=socn-d_socn小于socmin时,立即行驶到充电桩进行充电,同步修正该无人清扫车执行该区域所需电量值s_socn-x,避免下次出现此类情况。另外,调度其他无人清扫车完成剩余清扫任务。
25.所述修正的方法为:分别记录下无人清扫车在第x个待清扫区域准备时的剩余电量一及实时监控到l_socn-x=socn-d_socn小于socmin时的无人清扫车剩余电量二,计算其差值;
当实时监控到l_socn-x=socn-d_socn小于socmin时,获取当前无人清扫车在第x个待清扫区域内的行驶距离;调取无人清扫车的有效清扫面积参数,结合行驶距离,计算得出当前无人清扫车的已清扫面积;根据已清扫面积和差值,计算得出第x个待清扫区域的实际每平方米区域清扫所需电量的参数值,并将该参数值赋值给s_socx,完成修正。
26.下面以某品牌清扫车为例进行说明,行驶每公里耗电1%,清扫每平方米耗电0.05%,充满电按照100%计算,为保护电池,当电量降低至10%(即socmin)时,需进行充电操作。现对实施例中的各参数说明如下:socn:无人清扫车的剩余电量;s_socx:清扫完成每个待清扫区域所需的电量;d_socn:每个待清扫区域到垃圾倾倒点再返回充电桩所消耗的电量;l_socn-x:无人清扫车完成从启动到开始清扫指定的待清扫区域再至返回充电桩的整个过程后的剩余电量。
27.现有待清扫区域总共3个,分别为待清扫区域1面积300平方米,待清扫区域2面积500平方米和待清扫区域3面积1000平方米,他们分别距离充电桩1km,2km和3km.则清扫完各区域并行驶到充电桩所需电量为:s_socx+d_socn即:待清扫区域1:300*0.05%+1*1%=16%待清扫区域2:500*0.05%+2*1%=27%待清扫区域3:1000*0.05%+2*1%=52%现有3台无人清扫车,距离3个待清扫区域的距离均分别为1km,1km,1km.则各车到各清扫区域耗电均为1%,即s_socn-x均为1%。
28.如图2所示,现假设初始电量均为100%,假设第一轮情况下:无人清扫车1清扫待清扫区域1,无人清扫车2清扫待清扫区域2,无人清扫车3清扫待清扫区域3,则清扫一轮后各车剩余电量为:83%,72%,47%。
29.则在第二轮清扫时,如图3所示,若无人清扫车3仍然执行区域3清扫,则剩余电量-6%小于10%无法进行充电,而无人清扫车3剩余电量47%远大于10%此时充电效率不高,因此,按照本发明的方法,此时后台调度无人清扫车3清扫区域1,无人清扫车2清扫区域3,无人清扫车1清扫区域2.清扫完成后,各车剩余电量分别为:55%,19%和30%。
30.第三轮清扫时,如图4所示,则无人清扫车1执行清扫区域2,无人清扫车3执行清扫区域1,因为无人清扫车2无论执行哪个区域都存在电量不足的情况,则此时,系统调度无人清扫车2安排充电。同步的,由于无人清扫车3清扫区域1后,理论剩余电量13%,接近10%,清扫过程中需实时监控无人清扫车3电量,一旦小于10%,立即安排充电,并根据实际完成清扫面积修正更新无人清扫车3清扫每平米所需电量,以便后续精准计算。
31.该实施例能够实现对区域内车辆进行统一管理,通过智能调度充电算法,完成清扫任务的车辆定期向云端发送电量、位置信息,云端根据每辆清扫车与待清扫区域的距离、清扫该区域所需电量、清扫车倾倒完垃圾并回到充电桩的距离,来计算每辆清扫车所需电量,当剩余电量大于所需电量时,让该清扫车前往上述待清扫区域清扫、倾倒垃圾、充电。
32.实施例2如图5所示,本实施例提供了一种无人清扫车的智能充电调度系统,利用obu通过tcp协议与云后天进行通讯,实现对区域内车辆进行统一管理。所述系统包括云端服务器、无人清扫车,其中:云端服务器,用于该系统的中央控制单元,实时获取无人清扫车的车辆状态以及充电桩空闲工作状态,执行任意一项上述的方法,并向无人清扫车下发控制指令;无人清扫车,用于根据云端服务器下发的控制指令进行自动驾驶、清扫及充电。
33.所述无人清扫车包括obu车载单元、电池监测模块、定位模块和中央处理模块,其中:obu车载单元,用于实现中央处理模块与云端服务器直接的数据通信连接;电池监测模块,用于实时监控无人清扫车的剩余电量;定位模块,用于实时监控无人清扫车的位置信息,并记录其运行轨迹和行驶距离;中央处理模块,用于根据云端服务器下发的操作指令对无人清扫车进行控制。
34.所述云端服务器包括第一存储单元、第二存储单元和运算单元,其中:所述第一存储单元存储实现任意一项上述的方法的计算机程序指令;所述第二存储单元存储n辆无人清扫车的当前位置及剩余电量socn、运算单元计算得出的完成每个待清扫区域所需的电量s_socx、运算单元计算得出的每辆无人清扫车从当前位置行驶到每个待清扫区域所消耗的电量s_socn-x、运算单元计算得出的每个待清扫区域到垃圾倾倒点再返回充电桩所消耗的电量d_socn、清扫任务、运算单元计算得出的无人清扫车完成从启动到开始清扫指定的待清扫区域再至返回充电桩的整个过程后的剩余电量l_socn-x、最低充电电量socmin、无人清扫车的实时剩余电量、无人清扫车的有效清扫面积参数、无人清扫车在待清扫区域内的行驶距离;运算单元,用于调取第一存储单元和第二存储单元内存储的计算机程序指令和存储数据进行运算,输出运算结果。
35.应理解,上述实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解为在阅读本发明的内容后,本领域技术人员可以对本发明作各种改动和修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。