1.本实用新型涉及越障机器人技术领域,尤其是一种风力发电塔筒爬壁机器人。
背景技术:
2.风力发电塔筒作为风力发电装置的主要组成部分,在使用过程中不可避免地会出现如表面裂缝、腐蚀、雷击损坏等问题。因此需要定期对风力发电塔筒进行检修,以保证其使用寿命。风力发电机塔筒装载有机舱以及转子,通常高的风力发电塔筒更具有优势,因为风速会随着离地距离的增高而变大。现在发电功率为600千瓦风机的塔筒高度为40至60米。因而塔筒外壁的定期检测就成为了一个亟待解决的问题。
3.近年来,随着科技的高速发展,在清洗、检修、搜救等移动式作业工况下,爬壁机器人以其高效性、安全性和优越性正逐渐得到广泛的应用。由于发电塔筒内部并非是光滑面,而存在各种各样的障碍,因此普通爬壁机器人在塔筒内作业时会受到各种障碍的阻挡而无法正常进行工作。
技术实现要素:
4.未解决现有的爬壁机器人无法有效跨过障碍的问题,本实用新型提供一种能够磁吸式越障机器人,并采用如需技术方案。
5.一种风力发电塔筒爬壁机器人,包括车架、驱动电机、磁吸式链轮组、电池,所述磁吸式链轮组有两组位于车架两侧,由位于车架后方的所述驱动电机驱动;
6.所述磁吸式链轮组包括通过若干连接板连接的内侧链板和外侧链板,所述内侧链板和外侧链板一端安装有与所述驱动电机连接的驱动主齿轮,另一端安装有张紧齿轮,所述内侧链板和外侧链板上分别对应开有两个导向槽,所述张紧齿轮通过张紧齿轮轴安装在其中一个导向槽中,另一个导向槽中安装有联动板,所述联动板与所述张紧齿轮轴之间通过联动机构连接,所述联动板与其中一个连接板之间通过复位弹簧一连接;
7.所述驱动主齿轮和张紧齿轮上安装有链条,所述链条外侧面安装有多个永磁封装体。
8.进一步地,一组磁吸式链轮组包括两套联动机构,两套联动机构分别位于外侧链板外侧以及内侧链板内侧,所述联动机构包括联动轴、联动套筒、固定销,所述联动轴两端分别穿过所述联动板、张紧齿轮轴且通过所述固定销固定在内侧链板和外侧链板上,所述联动套筒套装在所述联动轴上,且所述联动套筒位于所述联动板和张紧齿轮轴之间。
9.进一步地,所述的永磁封装体固定在链条上,包括两块永磁铁,两块所述永磁铁通过尼龙套封装,通过轭铁实现磁路封闭,通过分隔体实现分隔。
10.进一步地,所述连接板上安装有恢复机构,所述恢复机构包括导向轴二、恢复轮、恢复轮轴、复位弹簧二,所述导向轴二有两根上端安装在所述连接板上,下端通过恢复轮轴安装有所述恢复轮,所述复位弹簧二两根套装在所述导向轴二上且位于连接板与恢复轮轴之间;所述恢复轮与所述链条内侧面接触。
11.进一步地,所述车架前方安装有永磁万向轮。
12.进一步地,所述车架前方还安装有选择摄像头机构,所述选择摄像头机构包括摄像头、摄像头驱动电机以及摄像头转轴,所述摄像头安装在摄像头转轴上,所述摄像头转轴与所述摄像头驱动电机之间通过齿轮传动。
13.本实用新型有益效果:
14.(1)本实用新型中设置有张紧轮、联动机构、联动板、复位弹簧一,当机器人在行走过程中遇到障碍物时张紧轮受到压迫通过联动机构与联动板一起向行走方向的反方向运动,此时复位弹簧一压缩,张紧轮与驱动主齿轮之间的距离变短,整个链条松弛从而使得更多的永磁封装体能够吸附在障碍物处的壁面上,增强障碍物处的吸附力;当张紧齿轮越过障碍物后,复位弹簧一伸展,使得张紧齿轮恢复原位,张紧齿轮与主动驱动齿轮之间距离恢复,链条恢复张紧状态,从而使更少的永磁封装体吸附与壁面上,减少障碍物出的吸附力,从而使机器人越过障碍物继续行走。
15.(2)本实用新型中车架前方设置有永磁万向轮,能够提高抗倾覆力矩,防止爬壁机器人因重力产生的力矩而发生倾覆。
附图说明
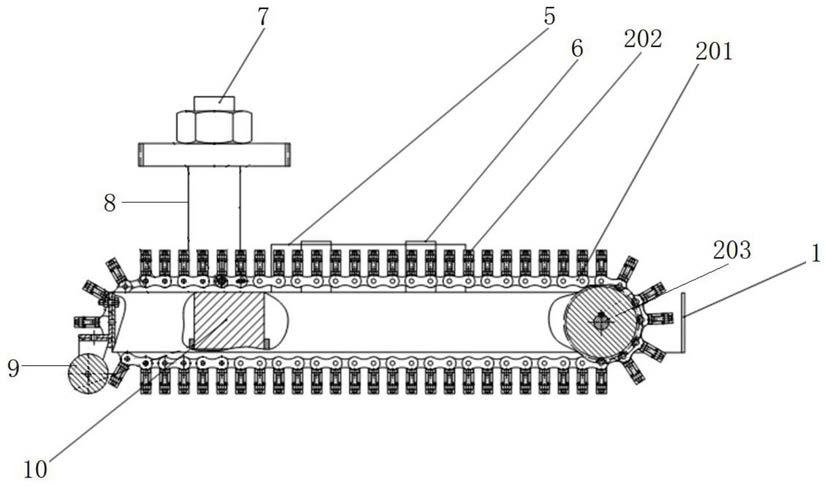
16.图1本实用新型侧视图;
17.图2为本实用新型俯视图
18.图3为本实用新型中摄像头驱动结构示意图;
19.图4为本实用新型中张紧缓冲机构俯视图;
20.图5为本实用新型中张紧缓冲机构侧视图;
21.图6为本实用新型中辅助张紧缓冲机构示意图;
22.图7为本实用新型中永磁封装体示意图;
23.图8为本实用新型中万向轮示意图;
24.图中:1车架,2磁吸式链轮组,201链条,202永磁封装体,203驱动主齿轮,204张紧齿轮,205内侧链板,206外侧链板,207驱动主齿轮轴,208联动轴,209联动套筒,210联动板,211导向轴一,212复位弹簧一,213轮轴导向槽,214联动板导向槽,215固定销,216张紧齿轮轴,3驱动电机,4驱动轮电机座,5电池,6电池固定件,7摄像头转轴,8轴承,9永磁万向轮,901-永磁轮,902-内六角圆柱头螺钉,903-永磁铁二,904-六角螺母,905-轴,906-深沟球轴承,907-套筒,908-六角薄螺母,909-密封圈,10摄像头驱动电机,11驱动大齿轮,12驱动小齿轮,13连接板,14恢复轮,15恢复轮轴,16导向轴二,17复位弹簧二,001-尼龙套,002-永磁铁一,003-六角螺母,004-平垫圈,005-螺栓一,006-轭铁,007-链节销轴,008-固定套筒,009-分隔体,010-连接弯板,011-螺栓二。
具体实施方式
25.为了使本领域的人员更好地理解本实用新型的技术方案,下面结合本实用新型的附图,对本实用新型的技术方案进行清楚、完整的描述,基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其它类同实施例,都应当属于本技术保护的范围。
26.参照图1、2,一种风力发电塔筒爬壁机器人,包括车架1、驱动电机3、磁吸式链轮组2、电池5,所述磁吸式链轮组2有两组位于车架1两侧,由位于车架1后方的所述驱动电机3驱动。
27.参照图1-4,所述磁吸式链轮组2包括通过若干连接板13连接的内侧链板205和外侧链板206,所述内侧链板205和外侧链板206等长且平行,通过二者之间垂直二者的若干连接板13连接。所述所述内侧链板205和外侧链板206一端安装有与所述驱动电机3连接的驱动主齿轮203,另一端安装有张紧齿轮204。所述内侧链板205和外侧链板206上分别对应开有两个导向槽,其中一个导向槽为联动板导向槽214,另一个导向槽为轮轴导向槽213,所述轮轴导向槽213安装有驱动主齿轮轴207,所述驱动齿轮安装在所述驱动主齿轮轴207上,所述联动板导向槽214中安装有联动板210,所述驱动主齿轮轴207和联动板210均能够在其对应的导向槽中前后移动。所述联动板210与所述张紧齿轮轴216之间通过联动机构连接,一组磁吸式链轮组2包括两套联动机构,两套联动机构分别位于外侧链板206外侧以及内侧链板205内侧,所述联动机构包括联动轴208、联动套筒209、固定销215,所述联动轴208两端分别穿过所述联动板210、张紧齿轮轴216且通过所述固定销215固定在内侧链板205和外侧链板206上,所述联动套筒209套装在所述联动轴208上,且所述联动套筒209位于所述联动板210和张紧齿轮轴216之间,所述联动板210与其中一个连接板13之间通过复位弹簧一212连接,所述联动板210与连接板13之间设置有导向轴一,导向轴一一端固定在连接板13上,另一端穿过所述联动板210,所述复位弹簧一212套装在所述导向轴一上。当所述张紧齿轮204受到压迫力移动时,张紧齿轮轴216通过联动机构与联动板210一起在导向槽中移动并压缩所述复位弹簧一212,当压迫力消失时,所述复位弹簧一212驱动所述联动板210、张紧齿轮轴216复位,同时张紧齿轮204复位。
28.所述驱动主齿轮203和张紧齿轮204上安装有链条201,所述链条201通过所述张紧齿轮204的运动张紧或松弛。
29.参照图1、7,所述链条201上安装有多个永磁封装体202,所述永磁封装体202包括两块永磁铁一002,两块所述永磁铁一002之间通过分隔体009进行隔离,优选的所述分隔体009为黄铜分隔体,两块所述永磁铁一002下部设置有轭铁006实现磁路的封闭,上部通过尼龙套001进行封装避免对磁铁一的破坏同时可以减小与壁面之间的摩擦。所述轭铁006底部通过连接弯板010连接有固定套筒008,所述固定套筒008中套装有链节销轴007,所述链节销轴007用以连接链条201之间的链节。
30.参照图5、6,所述连接板13上安装有恢复机构,所述恢复机构包括导向轴二16、恢复轮14、恢复轮轴15、复位弹簧二17,所述导向轴二16有两根上端安装在所述连接板13上,下端通过恢复轮轴15安装有所述恢复轮14,所述复位弹簧二17两根套装在所述导向轴二16上且位于连接板13与恢复轮轴15之间;所述恢复轮14与所述链条201内侧面接触。当遇到障碍物时,所述恢复轮14在障碍物作用下使复位弹簧二17压缩,链条201在恢复轮14处有一定松弛,增加吸附力;在越过障碍物后,所述复位弹簧二17始终恢复伸展状态,从而使链条201尽快恢复张紧状态,以便对壁面产生足够的吸附力,起到稳固作用。
31.参照图1、2、8,所述车架1前方安装有永磁万向轮9。永磁万向轮9通过万向轮连接板和车架连接板连接到车架1上,实现对壁面的吸附,从而提高抗倾覆力矩,防止爬壁机器人因重力产生的力矩而发生倾覆。由于链条201是一个柔性结构,所以当爬壁机器人发生倾
覆时,此时首先会使链条201上的第一块磁铁被抬起,故只有第一块磁铁可以产生防倾覆力矩。而增大第一块磁铁的磁力是不可行的,因为每一块磁铁因为转动都可能成为第一块磁铁,同时增大磁力的结果是进一步增大了整体结构的质量。故解决两者之间的矛盾的方法就是增加一个永磁万向轮9,从而提高抗倾覆力矩。
32.参照图1、2、3,所述车架1前方还安装有选择摄像头机构,所述选择摄像头机构包括摄像头、摄像头驱动电机10以及摄像头转轴7,所述摄像头转轴7通过轴承8转动地安装在车架1上,摄像头转轴7上端安装摄像头,下端安装有驱动大齿轮11,所述车架1内部安装有摄像头驱动电机10,所述摄像头驱动电机10的输出轴上安装有驱动小齿轮12,所述驱动小齿轮12与所述驱动大齿轮11啮合,通过摄像头驱动电机10带动摄像头的转动,同时通过设置之间不同的驱动大齿轮11和驱动小齿轮12起到转动减速作用。
33.进一步地,所述车架1两侧的两组磁吸式链轮组2的驱动主齿轮203与驱动电机3之间连接有差速器,通过设置差速器来在需要转向时来调节两个驱动主齿轮203产生不同的转速从而实现转向,此技术采样现有技术手段。