:
1.本实用新型涉及无人车技术领域,尤其涉及一种无人车照明结构。
背景技术:
2.随着科技的发展,无人车由于其能够节省人力,被广泛应用于巡检及图像采集工作中,这样不仅能够降低工作人员的工作量,而且在某些环境复杂的巡检工作中,不需要人工处理,提高工作人员作业的安全性。
3.无人车通常在车顶设置图像采集装置,在车前方设置用于照明的车灯,但无人车前端的形状通常是长方体,长方体的两侧凸起,会遮挡光线,也会造成图像采集装置的视野盲区,形成摄像死角,降低采集效果。
4.因此,本领域亟需一种无人车照明结构。
5.有鉴于此,提出本实用新型。
技术实现要素:
6.本实用新型的目的在于提供一种无人车照明结构,防止遮挡光线,避免形成摄像死角。
7.具体的,本实用新型的第一方面,提供了一种无人车照明结构,所述无人车照明结构包括:
8.图像采集装置,所述图像采集装置用于进行图像采集;
9.外壳体,所述外壳体在顶部设置有安装台,所述图像采集装置固定于所述安装台内部;
10.照明装置,所述照明装置设置于外壳体一侧用于照明,所述外壳体由安装台向所述照明装置一侧延伸设置有拱形面,所述拱形面沿无人车的长度方向为弧形,且在沿无人车的宽度方向从中间向两侧延伸为弧形。
11.采用上述方案,所述拱形面沿无人车的长度方向为弧形,且在沿无人车的宽度方向从中间向两侧延伸为弧形,一方面,解决了传统矩形的棱边遮挡光线的问题,另一方面扩展了所述图像采集装置的拍摄空间,避免形成摄像死角。
12.进一步地,所述无人车照明结构还包括车辆底盘,所述车辆底盘设置有照明安装板,所述照明装置与所述照明安装板相连接。
13.采用上述方案,将照明装置固定在底盘,提高照明装置固定的稳固度。
14.优选地,所述底盘和外壳体之间还设置有连接柱,所述连接柱一端与底盘相连接,另一端和外壳体相连接。
15.采用上述方案,提高车体的稳固度。
16.优选地,所述外壳体设置有透光口,所述透光口的安装位置与照明装置相对应,所述透光口设置有透明材料。
17.采用上述方案,所述透光口设置有透明材料,便于照明装置向外输送光线,且能够
保护内部的照明装置,防止当车辆发生碰撞时破坏照明装置。
18.进一步地,所述车辆底盘还包括固定板,所述固定板与所述车辆底盘相连接,所述照明装置还设置有固定杆,所述固定杆穿过所述照明安装板与固定板相连接。
19.采用上述方案,提高所述照明装置的安装稳固度。
20.优选地,所述车辆底盘还包括连接板,所述连接板设置于所述固定板和车辆底盘之间,所述固定板与所述车辆底盘通过所述连接板相连接。
21.采用上述方案,所述固定板与所述车辆底盘通过所述连接板相连接,进一步保证所述固定板的稳定性,且便于拆卸所述固定板。
22.优选地,所述外壳体还设置有固定凸块,所述固定凸块向所述外壳体外侧突出,所述固定板上边缘从所述外壳体内部伸入固定凸块内部。
23.采用上述方案,为所述固定板提供在所述外壳体上的连接点,提高所述固定板稳定性。
24.优选地,所述车辆底盘还包括支撑板,所述支撑板底部与所述车辆底盘相连接,所述固定杆穿过所述固定板与支撑板相连接。
25.采用上述方案,所述支撑板能够连接电源,所述固定杆穿过所述固定板与支撑板相连接,能够通过固定杆输送电能,保证电能传输。
26.更优选地,所述支撑板还设置有支撑件,所述支撑件设置于所述支撑板一侧,所述支撑件与所述车辆底盘相连接。
27.采用上述方案,为所述支撑板提供支撑,提高所述支撑板安装稳定性。
28.优选地,所述支撑件为直角三角形,且所述直角三角形的两直角边分别与所述支撑板和所述车辆底盘相连接。
29.采用上述方案,利用三角形的稳定性,提高所述支撑板安装稳定性。
30.优选地,所述支撑板、固定板、照明安装板三块板之间相互平行。
31.采用上述方案,便于固定杆同时穿过,便于安装。
32.综上所述,本实用新型具有以下有益效果:
33.1.本技术的无人车照明结构,所述拱形面沿无人车的长度方向为弧形,且在沿无人车的宽度方向从中间向两侧延伸为弧形,一方面,解决了传统矩形的棱边遮挡光线的问题,另一方面扩展了所述图像采集装置的拍摄空间,避免形成摄像死角;
34.2.本技术的无人车照明结构,所述透光口设置有透明材料,便于照明装置向外输送光线,且能够保护内部的照明装置,防止当车辆发生碰撞时破坏照明装置;
35.3.本技术的无人车照明结构,所述连接凸块为所述固定板提供在所述外壳体上的连接点,提高所述固定板稳定性;
36.4.本技术的无人车照明结构,所述支撑件为直角三角形,利用三角形的稳定性,提高所述支撑板安装稳定性。
附图说明:
37.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提
下,还可以根据这些附图获得其他的附图。
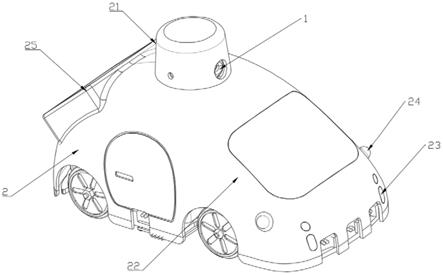
38.图1为本技术无人车照明结构的车体外形结构示意图;
39.图2为所述固定板安装状态的结构示意图;
40.图3为本技术无人车照明结构的一种实施方式的结构示意图。
41.附图标记说明:
42.通过上述附图标记说明,结合本实用新型的实施例,可以更加清楚的理解和说明本实用新型的技术方案。
43.1、图像采集装置;2、外壳体;21、安装台;22、拱形面;23、透光口;24、固定凸块;25、显示屏;3、照明装置;31、固定杆;4、车辆底盘;41、照明安装板;42、连接柱;43、固定板;44、连接板;45、支撑板;451、支撑件;
具体实施方式:
44.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实用新型的一些方面相一致的装置和方法的例子。
45.在本实用新型使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本实用新型。在本实用新型和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
46.以下将通过实施例对本实用新型进行详细描述。
47.如图1、3所示,本实用新型提供了一种无人车照明结构,所述无人车照明结构包括:图像采集装置1,所述图像采集装置1用于进行图像采集;
48.外壳体2,所述外壳体2在顶部设置有安装台21,所述图像采集装置1固定于所述安装台21内部;
49.在具体实施过程中,所述图像采集装置1可以为摄像头,所述安装台21设置有采集孔,所述摄像头能够从所述采集孔处进行图像采集。
50.照明装置3,所述照明装置3设置于外壳体2一侧用于照明,所述外壳体2由安装台21向所述照明装置3一侧延伸设置有拱形面22,所述拱形面22沿无人车的长度方向为弧形,且在沿无人车的宽度方向从中间向两侧延伸为弧形。
51.在具体实施过程中,所述照明装置3可以为led灯。
52.采用上述方案,所述拱形面22沿无人车的长度方向为弧形,且在沿无人车的宽度方向从中间向两侧延伸为弧形,一方面,解决了传统矩形的棱边遮挡光线的问题,另一方面扩展了所述图像采集装置1的拍摄空间,避免形成摄像死角。
53.在具体实施过程中,所述外壳体2内部设置有蓄电池,用于为车内的摄像头或照明装置3以及其他用电器供电。
54.如图1所示,在具体实施过程中,所述外壳体2还安装有显示屏25,所述显示屏25能够显示车辆运行状态,所述车辆运行状态包括剩余电量、运行路线信息等。
55.如图3所示,在具体实施过程中,所述无人车照明结构还包括车辆底盘4,所述车辆
底盘4设置有照明安装板41,所述照明装置3与所述照明安装板41相连接。
56.采用上述方案,将照明装置3固定在底盘,提高照明装置3固定的稳固度。
57.如图3所示,在具体实施过程中,所述底盘和外壳体2之间还设置有连接柱42,所述连接柱42一端与底盘相连接,另一端和外壳体2相连接。
58.在本实用新型一个优选的实施方式中,所述连接柱42内部设置有螺栓,提高稳固度。
59.采用上述方案,提高车体的稳固度。
60.如图3所示,在本实用新型一个优选的实施方式中,所述外壳体2设置有透光口23,所述透光口23的安装位置与照明装置3相对应,所述透光口23设置有透明材料。
61.在具体实施过程中,所述透光材料可以为玻璃或者塑料等。
62.采用上述方案,所述透光口23设置有透明材料,便于照明装置3向外输送光线,且能够保护内部的照明装置3,防止当车辆发生碰撞时破坏照明装置3。
63.如图3所示,在具体实施过程中,所述车辆底盘4还包括固定板43,所述固定板43与所述车辆底盘4相连接,所述照明装置3还设置有固定杆31,所述固定杆31穿过所述照明安装板41与固定板43相连接。
64.在具体实施过程中,所述固定杆31可以为内部穿设有电线的杆体或者金属杆。
65.采用上述方案,提高所述照明装置3的安装稳固度。
66.如图3所示,在本实用新型一个优选的实施方式中,所述车辆底盘4还包括连接板44,所述连接板44设置于所述固定板43和车辆底盘4之间,所述固定板43与所述车辆底盘4通过所述连接板44相连接。
67.采用上述方案,所述固定板43与所述车辆底盘4通过所述连接板44相连接,进一步保证所述固定板43的稳定性,且便于拆卸所述固定板43。
68.如图1、2所示,在本实用新型一个优选的实施方式中,所述外壳体2还设置有固定凸块24,所述固定凸块24向所述外壳体2外侧突出,所述固定板43上边缘从所述外壳体2内部伸入固定凸块24内部。
69.在本实用新型一个优选的实施方式中,所述固定凸块24在所述外壳体2外侧为圆形凸起。
70.采用上述方案,为所述固定板43提供在所述外壳体2上的连接点,提高所述固定板43稳定性。
71.如图3所示,在本实用新型一个优选的实施方式中,所述车辆底盘4还包括支撑板45,所述支撑板45底部与所述车辆底盘4相连接,所述固定杆31穿过所述固定板43与支撑板45相连接。
72.采用上述方案,所述支撑板45能够连接电源,所述固定杆31穿过所述固定板43与支撑板45相连接,能够通过固定杆31输送电能,保证电能传输。
73.如图3所示,在具体实施过程中,所述支撑板45还设置有支撑件451,所述支撑件451设置于所述支撑板45一侧,所述支撑件451与所述车辆底盘4相连接。
74.采用上述方案,为所述支撑板45提供支撑,提高所述支撑板45安装稳定性。
75.如图3所示,在本实用新型一个优选的实施方式中,所述支撑件451为直角三角形,且所述直角三角形的两直角边分别与所述支撑板45和所述车辆底盘4相连接。
76.采用上述方案,利用三角形的稳定性,提高所述支撑板45安装稳定性。
77.如图3所示,在本实用新型一个优选的实施方式中,所述支撑板45、固定板43、照明安装板41三块板之间相互平行。
78.采用上述方案,便于固定杆31同时穿过,便于安装。
79.工作原理:所述拱形面22沿无人车的长度方向为弧形,且在沿无人车的宽度方向从中间向两侧延伸为弧形,当图像采集装置1和照明装置3同时开启时,能够防止传统无人车边缘处对由照明装置3向图像采集装置1传播的光线的遮挡,同时扩展了所述图像采集装置1的拍摄空间,避免形成摄像死角。
80.应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。