1.本发明涉及探测技术领域,特别涉及一种带有风机发电补能的无人巡逻车及其应用方法。
背景技术:
2.在北方边境地区,巡逻战士经常处于寒冷、大风的恶劣环境之中。而自动驾驶技术的发展,使无人巡逻车成为现实。
3.无人巡逻车需要解决的问题之一就是能源的持续供给问题。目前来看,从大陆自然环境中获取能源主要有太阳能和风能两种方式。对于北方边境地区来说,冬季的光照严重不足,而风能则相对较为充足。因此,采用太阳能与风能的结合,能够使巡逻车获得较好的任务执行能力。
4.受探测地形的限制无人巡逻车通常的设计尺寸不能太大,因此如何在无人巡逻车上有限空间内加装风机是面临的一大难题。安装小尺寸风机及其支撑结构虽然能节省空间,但其自身发电能力有限,不能满足无人巡逻车的电能补充供给需求,影响无人巡逻车的能源持续供给。安装大尺寸风机及其支撑结构就需要对现有无人巡逻车加大尺寸重新设计,无形中增加了使用成本,且大尺寸巡逻车对于探测地形受局限,无法体现无人巡逻车机动性强的优势。此外,由于无人巡逻车的应用场景大多为寒冷、大风的恶劣环境,在利用风机发电时,风机的支撑架需要承受更多风载带来的弯矩,会给无人巡逻车带来过大的倾覆力矩,容易发生巡逻车倾覆的问题,影响无人巡逻车的正常探测任务。
技术实现要素:
5.针对现有技术存在的问题,本发明的目的在于提供一种能够利用风能补能,提高车辆巡航里程,以及能够避免在大风环境倾覆的无人巡逻车及其应用方法。
6.为实现上述目的,本发明第一方面提供一种带有风机发电补能的无人巡逻车,包括车辆主体、风机发电装置、蓄电池、电机和车体稳定结构,所述风机发电装置设置在所述车辆主体上能够将风能转化为电能,所述蓄电池与所述风机发电装置电性连接,所述蓄电池将所述风机发电装置的发电存储,所述蓄电池向所述电机提供电力驱动无人巡逻车进行巡航探测;其中,所述风机发电装置为垂直轴风机,所述车辆主体上设置所述车体稳定结构,所述车体稳定结构能够根据外部风力大小和无人巡逻车的工作状态自动调整所述车辆主体与地面的接触面积。
7.进一步,所述垂直轴风机包括风轮和风机主轴,所述风机主轴设置在车辆主体的车顶中部,并且风机主轴沿竖直方向竖立,所述风轮设置在所述风机主轴上并可在外部风力作用下绕所述风机主轴转动而使所述风机发电装置发电;所述垂直轴风机的高度能够根据无人巡逻车的工作状态而自动调整。
8.进一步,所述风机主轴为可伸缩轴,所述车体稳定结构包括多个折叠支腿;在无人巡逻车工作在驻车补能状态时,所述无人巡逻车驻停,所述风机主轴升高使所述风轮的叶
片高度提高至预设第一位置,并且所述多个折叠支腿展开支撑在地面上,所述风机发电装置工作发电补能。
9.进一步,所述风机主轴为可伸缩轴,所述车体稳定结构包括多个折叠支腿;在无人巡逻车工作在纯巡航状态时,所述无人巡逻车保持巡航行进,所述风机主轴收缩使所述风轮的叶片高度下降至预设第二位置,并且所述多个折叠支腿折叠收回在无人巡逻车上,所述风机发电装置不工作,所述无人巡逻车通过所述蓄电池提供的能量运行。
10.进一步,所述风机主轴为可伸缩轴,所述车体稳定结构包括多个折叠支腿;在无人巡逻车工作在巡航补能状态时,所述无人巡逻车保持巡航行进,所述风机主轴升高使所述风轮的叶片高度上升至预设第三位置,并且所述多个折叠支腿折叠收回在无人巡逻车上,所述风机发电装置工作,所述无人巡逻车通过所述蓄电池提供的能量运行。
11.进一步,所述车辆主体上还设置有充电接口,所述蓄电池能够通过所述充电接口接入市电进行充电。
12.进一步,所述车辆主体上还设置有太阳能发电装置。
13.进一步,所述车辆主体上还设置有风力传感器和控制器,所述风力传感器用于感测无人巡逻车进行巡航探测时的外部风力并将风力数据发送至所述控制器,所述控制器用于根据风力数据得到外部风力大小并控制所述风机发电装置和所述车体稳定结构的工作模式。
14.本发明的第二方面提供一种上述无人巡逻车的应用方法,包括:
15.根据外部风力大小确定无人巡逻车的工作状态;
16.在外部风力大于预定阈值时,控制无人巡逻车驻停,升高所述风机发电装置的风轮,所述车体稳定结构自动调整所述车辆主体与地面的接触面积,所述风机发电装置工作发电补能。
17.进一步,在外部风力小于预定阈值时,控制无人巡逻车巡航行进,降低所述风机发电装置的风轮,所述车体稳定结构收回无人巡逻车上,所述风机发电装置工作发电补能或所述风机发电装置不工作停止发电。
18.本发明在巡逻车上设置垂直轴风力发电机,可以利用风能补充电力,为无人巡逻车巡航探测持续提供动力,提高了无人巡逻车的续航能力,进而提升了无人巡逻车的巡航探测能力。同时,垂直轴风机可全风向工作,同时启动力矩低,适合低风速工作,使得无人巡逻车在低风环境下也能随时发电补能。此外,巡逻车上还设置有车体稳定结构,通过车体稳定结构可以调整风机工作时对车体造成的倾覆力矩,保持车体在风力发电时的稳定性,避免车辆发生倾覆。本发明的无人巡逻车可以适用于低风环境、大风恶劣环境以及冬季太阳不足等多种应用环境下的巡航探测。
19.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
20.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他
的附图。
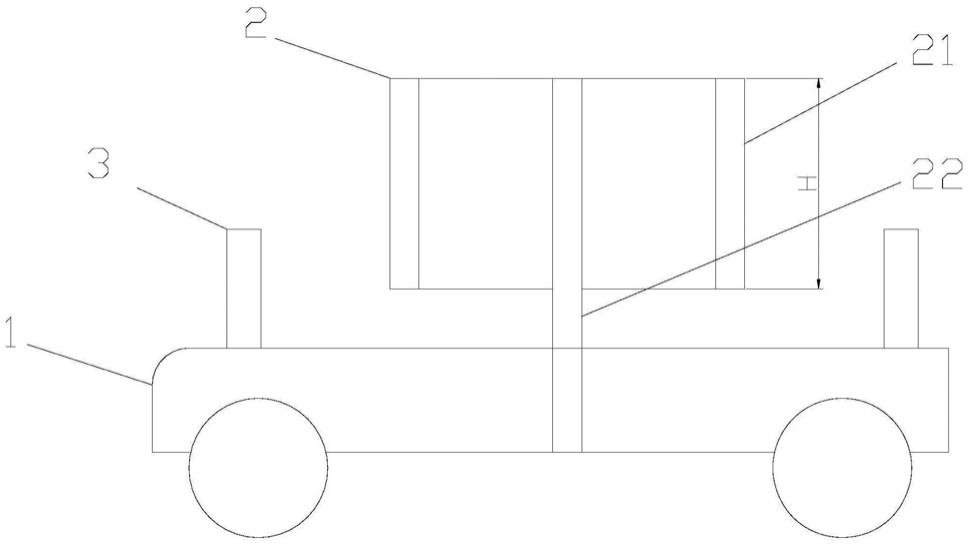
21.图1-图2为本发明实施例的无人巡逻车的结构示意图;
22.图3为本发明实施例的无人巡逻车工作在驻车状态的示意图;
23.图4为本发明实施例的无人巡逻车工作在纯续航状态的示意图;
24.图5为本发明实施例的无人巡逻车工作在续航补能状态的示意图;
25.图6为本发明实施例的无人巡逻车的发电补能能量流向的示意图;
26.图7为本发明实施例的无人巡逻车应用方法的流程图。
具体实施方式
27.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。
28.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本发明的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本发明的技术方案而没有特定细节中的一个或更多,或者可以采用其它的方法、组元、装置、步骤等。在其它情况下,不详细示出或描述公知方法、装置、实现或者操作以避免模糊本发明的各方面。
29.附图中所示的方框图仅仅是功能实体,不一定必须与物理上独立的实体相对应。即,可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
30.附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。
31.如图1和图2所示,带有风机发电补能的无人巡逻车,包括车辆主体1、风机发电装置2、蓄电池、电机和车体稳定结构3,所述风机发电装置2设置在所述车辆主体1上能够将风能转化为电能,所述蓄电池与所述风机发电装置2电性连接,所述蓄电池将所述风机发电装置2的发电存储,所述蓄电池向所述电机提供电力驱动无人巡逻车进行巡航探测;其中,所述风机发电装置2为垂直轴风机,所述车辆主体1上设置所述车体稳定结构3,所述车体稳定结构3能够根据外部风力大小和无人巡逻车的工作状态自动调整所述车辆主体1与地面的接触面积。
32.本实施在车辆上分别设置风机发电装置和车体稳定结构,通过风机发电装置可以利用风能补充电力,为无人巡逻车巡航探测持续提供动力,通过车体稳定结构可以调整风机工作时对车体造成的倾覆力矩,保持车体在风力发电时的稳定性,避免车辆发生倾覆,提升了无人巡逻车的整体探测能力及安全性。垂直轴风机可全风向工作,同时启动力矩低,适合低风速工作,使得无人巡逻车在低风环境下也能随时发电补能。
33.所述垂直轴风机包括风轮21和风机主轴22,所述风机主轴22设置在车辆主体1的车顶中部,并且风机主轴22沿竖直方向竖立,所述风轮21设置在所述风机主轴22上并可在外部风力作用下绕所述风机主轴22转动而使所述风机发电装置2发电。风轮21上设置有多个弧形叶片,本实施例中以四个叶片为例进行说明,但本发明并不以此为限制,在实际应用
时可以根据需要做适应性调整。当风吹向叶片时,产生力矩,驱动风轮21绕风机主轴22旋转而使风机发电装置发电。本实施例将风机主轴和风轮设置在车顶中部,可以避免安装在无人巡逻车上的风机发电装置对行车干扰,确保无人巡逻车行车通过性及安全性。无人巡逻车为了适应不同需要设置了三种工作状态,包括驻车补能状态、纯巡航状态和巡航补能状态。所述垂直轴风机的高度能够根据无人巡逻车的工作状态而自动调整。在外部风力大或者无人巡逻车电力不足的情况,无人巡逻车可以工作在驻车补能状态,以便无人巡逻车能够更快速地利用风能补充能量。在外部风力不大或者无人巡逻车电力较为充足的情况,无人巡逻车可以工作在巡航补能状态,以便在巡航探测同时利用风能补充能量。在无人巡逻车满电状态或者外部无风的情况,无人巡逻车可以工作在纯巡航状态,以便可以提高探测效率。本实施例中无人巡逻车通过设置三种工作状态,可以令无人巡逻车满足不同的工况和应用需求,提高了无人巡逻车的应用能力。
34.在本发明一实施例中,如图3所示,所述风机主轴22为可伸缩轴,所述车体稳定结构3包括多个折叠支腿31;在无人巡逻车工作在驻车补能状态时,所述无人巡逻车驻停,所述风机主轴22升高使所述风轮21的叶片高度提高至预设第一位置,并且所述多个折叠支腿31展开支撑在地面上,所述风机发电装置2工作发电补能。为了提高风机发电装置的发电效率,控制风机主轴升高进而带动风轮的叶片升高至最高位置,风轮的叶片在最高位置旋转速度更快,进而提高了发电效率,可以更快地对无人巡逻车补充能量。风轮叶片旋转速度快,使得倾覆力矩也随之变大,为了避免车体倾覆,通过在车体两侧展开多个折叠支腿,提升了整个车体的宽度保证驻车补能状态车体的稳定。支腿的展开尺寸与风速、风机直径、风机高度、车体高度、车重相关,其参数设计可根据实际情况进行优化,本发明并不以为限制。
35.在本发明一实施例中,如图4所示,所述风机主轴22为可伸缩轴,所述车体稳定结构3包括多个折叠支腿31;在无人巡逻车工作在纯巡航状态时,所述无人巡逻车保持巡航行进,所述风机主轴22收缩使所述风轮21的叶片高度下降至预设第二位置,并且所述多个折叠支腿31折叠收回在无人巡逻车上,所述风机发电装置2不工作,所述无人巡逻车通过所述蓄电池提供的能量运行。为了提高无人巡逻车的探测效率及通过性,控制风机主轴降低进而带动风轮的叶片下降至最低位置,此时风力发电装置不工作,风轮的叶片在最低位置不旋转停止发电。风轮的叶片下降到最低位置,降低了无人巡逻车在行进过程的风阻,无人巡逻车能够以更快地速度进行探测并且整车的高度下降,有助于无人巡逻车在特殊环境下的通过性,提高了无人巡逻车的探测效率和通过性。
36.在本发明一实施例中,如图5所示,所述风机主轴22为可伸缩轴,所述车体稳定结构3包括多个折叠支腿31;在无人巡逻车工作在巡航补能状态时,所述无人巡逻车保持巡航行进,所述风机主轴22升高使所述风轮21的叶片高度上升至预设第三位置,并且所述多个折叠支腿31折叠收回在无人巡逻车上,所述风机发电装置2工作,所述无人巡逻车通过所述蓄电池提供的能量运行。为了兼顾巡逻车的探测效率及续航能力,控制风机主轴升高进而带动风轮的叶片升高至最低位置和最高位置之间的中间位置,风轮的叶片在中间位置既能旋转发电,又能减少行进过程的风阻,保证了无人巡逻车的探测效率及续航能力。
37.上述实施例通过调整折叠支腿和伸缩轴,选择对应的能量使用方式,使无人巡逻车可适应各种工作需要,具有较高的灵活性。此外,上述实施例通过将风机主轴设置为伸缩轴来调节垂直轴风机的高度,然而本发明并不局限于此,也可以采用其他方式调节垂直轴
风机的高度,如利用折叠式支架来改变风机高度等。折叠支腿也可通过车载驻锄、人工固定等方式替代。
38.在风速为v,空气密度为ρ,风能利用系数c
p
,风机半径为r,迎风面高度为h时,风机功率为
39.p=0.5c
p
ρv3rh
40.垂直轴风机合力的压心距离地面的高度为,根据获取的能量对空气速度的影响,以及冲量变化,倾覆力矩可以近似的计算如下。
[0041][0042]
由于倾覆力矩的大小只由自然环境和风机自身尺寸决定,对垂直轴风力车来说,其倾覆危险最大时的风向方向为车体恢复力矩最小时的方向。
[0043]
车体的恢复力矩为:
[0044][0045]
其中,g为车体总重,w为车体宽度。根据m2≥m,可以得到
[0046][0047]
车体宽度(支腿展开状态)与风速、风机直径、风机高度、车体高度、车重均相关,参数设计可根据实际情况进行优化。而可折叠支腿使车体宽度设计受限减小,支腿收缩状态的巡航阻力降低,而支腿的展开尺寸则可以保证驻车补能状态车体的稳定。在支腿使整车宽度增大一倍时,在其它条件不变的情况下,可使整车的可承受风速提高至1.4倍,或风机设计直径提高一倍。对应的整车能量获取能力也提高一倍左右。
[0048]
风机叶片越靠近地面,风机受到地面环境和地面障碍物的影响越大。可伸缩转轴使风机在地面障碍物较多时,可通过提升风机叶片位置高度,提高并稳定风机的迎流速度,提高能量补充能力。
[0049]
无人巡逻车具有支腿结构,用来提高车辆抗倾覆能力。展开后的支腿,扩大了车辆的地面接触范围,从而使整车倾覆力矩增大。根据公式在其他参数不变的情况下,支腿增加了展开状态的整车宽度w,可承受风速、风机直径、风机高度均可以随之对应提高。而根据风机能量转换功率p=0.5c
p
ρv3rh,风机最大功率也相应提高。
[0050]
上述实施例中垂直轴风机在无人巡逻车的高度可以根据巡逻车的工作状态来进行调整,在不同的工况环境以及需求下,无人巡逻车可以在三种工作状态下切换,极大了提高了无人巡逻车的应用灵活性。
[0051]
可选的,所述车辆主体1上还设置有充电接口,所述蓄电池能够通过所述充电接口接入市电进行充电或者通过垂直轴风机发电进行充电。如图6所示为无人巡逻车的发电补能能量流向的示意图,在充电接口接入市电时,通过市电对蓄电池进行充电,再由蓄电池向电机提供电能驱动无人巡逻车探测巡航。在无人巡逻车在野外工作时,通过垂直轴风机发电对蓄电池进行充电,再由蓄电池向电机提供电能驱动无人巡逻车巡航。
[0052]
可选的,所述车辆主体1上还设置有太阳能发电装置,可以采用风机发电和太阳能
发电共同设置在巡逻车上,使整车既可以利用风能,又可以利用太阳能发电,在冬天或者傍晚等弱光照环境下利用风能发电,在无风或者弱风环境下利用太阳能发电,提高了无人巡逻车在不同环境下的适用度。
[0053]
可选的,所述车辆主体1上还设置有风力传感器和控制器,所述风力传感器用于感测无人巡逻车进行巡航探测时的外部风力并将风力数据发送至所述控制器,所述控制器用于根据风力数据得到外部风力大小并控制所述风机发电装置2和所述车体稳定结构3的工作模式。
[0054]
如图7所示,本发明的无人巡逻车的应用方法,该无人巡逻车的结构以及工作原理在上述实施例中已经详细阐述在此不再赘述,该应用方法包括以下步骤:
[0055]
步骤s700:根据外部风力大小确定无人巡逻车的工作状态。外部风力大小数据可以通过互联网获取,也可以通过车辆上设置的传感器获取风力数据。
[0056]
步骤s710:在外部风力大于预定阈值时,控制无人巡逻车驻停,升高所述风机发电装置的风轮,所述车体稳定结构自动调整所述车辆主体与地面的接触面积,所述风机发电装置工作发电补能。
[0057]
上述实施例无人巡逻车的工作状态除了和外部风力大小相关,其与无人巡逻车的电量也存在关联。例如,在外部风力小于预定阈值时且电量小于50%,控制无人巡逻车巡航行进,降低所述风机发电装置的风轮至中间位置,所述车体稳定结构收回无人巡逻车上,所述风机发电装置工作发电补能,无人巡逻车可以在巡航同时利用风机发电。或者在外部风力小于预定阈值时且电量大于50%,控制无人巡逻车巡航行进,降低所述风机发电装置的风轮至最低位置,所述车体稳定结构收回无人巡逻车上,所述风机发电装置不工作停止发电,无人巡逻车仅巡航。
[0058]
本发明的无人巡逻车与现有技术相比具有以下优点:
[0059]
1、本发明利用垂直风力发电机与无人巡逻车的使用环境相结合,使无人巡逻车可以达到从自然中获取能量,提高无人巡航工作的能力。
[0060]
2、改善车辆的野外环境下补冲能量的能力。利用垂直轴风机的低启动风速和风向不敏感的特性,可以在低风速时将风能转化为电能。同时车辆的行驶过程中,不必考虑风机的工作和调整风机方向等问题。
[0061]
3、无人巡逻车具有无限距离巡航能力。由于车辆可以进行驻车补能和巡航补能,整车可以在无紧急任务时在巡航的同时补能,使整车的行驶距离不受约束。在远程遥控的环境下,可以提前进行车辆布置,并根据场景进行外部态势感知。为边疆巡逻和火力布置带来重大收益。
[0062]
4、适应车辆不同工作状态的补能需求。在车辆驻车、巡航工作状态时,车辆均可以从外界获取能量补充。而不必因工作状态的变化过于影响能量的补充。
[0063]
5、车辆的稳定性可调。通过伸展支腿、缩短转轴高度,可以在不同工作状态下,调整整车的稳定度,适应不同风速、不同工作状态的主要需求。
[0064]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的
权利要求指出。
[0065]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。