1.本发明涉及一种移动机器人领域的装置,具体是一种具有多模式运动特点的轮履腿复合式移动机器人。
背景技术:
2.我国是一个自然灾害发生频繁的国家,面对地震等重大自然灾害造成的地下及遮蔽空间结构不稳固、信息未知等问题,救援人员贸然进去可能遇到危险,这时就需要一些移动机器人来替代人完成各种搜救、信息收集等任务。地下及遮蔽空间具有“狭、小、危、乱”等特点,要求移动机器人应该具有较强的环境适应性以及机动性,能应对各种复杂路况。如今移动机器人的主要结构形式分为四种:轮式、履带式、腿式、复合式,对于复杂多变的路况,单一模式的移动机器人很难满足任务需求,复合式移动机器人是通过上述三种基本结构组合形成的,复合式移动机器人相比单一模式移动机器人具有更加优越的性能以及越障能力,是救援任务的主要选择对象。
3.查找相关文献可知,复合式移动机器人有多种不同形式,例如法国第六大学研制的一款轮腿式移动机器人hylos,该机器人将腿式机构和轮式机构结合,一般情况下,机器人可以采用轮式进行运动,当遇到较高的障碍物时,采用利用腿式机构实现越障;伊朗图西科技大学研制了一款履腿式移动机器人,该机器人由两条主履带以及四条履带臂组成,可以通过四条履带臂辅助达成越障目的等,但是这些机器人都不能综合三种基本运动模式的优点,在越障性能方面、运动能力方面和灵活性仍有不足。
4.中国专利号:201510819928.7,发明名称“轮履腿复合式移动机器人”,其包括车体、履带腿、支撑腿、轮式升降机构,其中履带臂通过内轴和外轴与车架相连,四套履带臂对称分布于车架的四角;支撑腿通过支撑腿传动轴和车架相连,两条支撑腿对称分布于车架的前后;轮式升降机构通过连接板与车架相连,轮式升降机构设置在车架中间。通过电机驱动履带臂、支撑腿、和轮式升降机构运动,使机器人具有不同姿态。
5.上述专利,轮式运动通过控制轮式升降机构进行切换,轮式升降机构结构复杂,重量大,且采用独立电机驱动,导致整体重量大、电机数量过多,不仅增加了机器人的成本,而且增大了能耗。该发明左右履带臂由一个电机驱动,摆臂自由度少,灵活性不足,且各种运动模式之间相互独立,在复杂多变的路况下执行任务,各模式协调工作困难,在运动过程中无法灵活地实现车体自适应平衡。
技术实现要素:
6.针对现有技术中的不足,本发明提供一种轮履腿复合式移动机器人,具有三种基本运动模式的特点,并且能协调各模式之间的运动,实现“轮式、履带式、腿式、轮腿式、履腿式、轮履腿式”七种运动模式,具有较强的运动能力、越障能力、自适应平衡能力,适用于各种复杂多变的任务环境。
7.为了实现以上目的,本发明提供一种轮履腿复合式移动机器人,包括车体、动力装
置、摆臂机构、传动机构、电池、车轮。
8.所述动力装置包括四个伺服驱动电机、两个外摆臂电机与两个内摆臂电机;
9.所述车架为传动机构、摆臂机构的载体,所述车架包括电池支架、内摆臂电机支座、外摆臂电机支座、外轴轴承支座、驱动电机支座,其中:电池支架通过铝型材固定在车架的中间位置,四个伺服驱动电机通过驱动电机支座与车架连接,伺服驱动电机用于驱动内轴进行旋转运动,驱动履带与车轮进行运动,四个摆臂电机通过摆臂电机支座与车架连接,摆臂电机用与驱动摆臂机构进行旋转运动;
10.所述传动机构为四套,其内轴与外轴的轴线重合,内轴上固定车轮与履带轮,外轴上固定摆臂法兰,履带轮固定在车轮的内侧,电机通过齿轮传动的方式给内轴与外轴提供动力,从而实现腿式、履带式、轮式运动以及其他模式的运动,传动机构通过外轴轴承支座安装在车架上,对称分布于车架的四角;
11.所述摆臂机构为四套,其形状为三角形,摆臂机构安装在车轮的内侧,摆臂机构通过摆臂板联轴器与传动机构连接,对称分布于车架的四角;
12.所述车轮为四个,其与传动机构内轴连接,位于摆臂的外侧,通过驱动电机可以控制车轮的转动,实现轮式运动。
13.优选地,所述车架采用工字铝板,四个驱动电机对称固定在车架的四角处并与传动机构相连,四个摆臂电机,两两错开分布于传动机构两侧,并且通过齿轮啮合与传动机构相连,电池支架分布于车架中部,通过铝型材与车架相连。
14.优选地,每套所述摆臂机构包括履带、两个从动轮、两个承重轮、驱动轮、张紧装置连接板、履带连接板、履带从动轮板、两个紧固块、摆臂板、从动轮轴、承重轮轴,其中:两个从动轮通过从动轮轴安装在履带从动轮板上;两个承重轮通过承重轮轴安装在摆臂板上;履带连接板与摆臂板连接,通过驱动履带连接板旋转,从而实现摆臂的摆动;张紧装置连接板将摆臂板与履带从动轮板连接,通过两个紧固块上的螺钉调整张紧程度达到张紧履带的作用。
15.优选地,每套所述传动机构包括内轴、外轴、内轴齿轮、外轴齿轮、履带连接板联轴器、外轴轴承支座,其中内轴通过轴承与外轴连接,外轴通过轴承与外轴轴承支座相连,外轴上安装有履带连接板联轴器,传动机构通过外轴轴承固定在车架的四角处。
16.更优选地,车架上的驱动电机通过内轴与履带驱动轮以及车轮相连,驱动电机转动带动内轴旋转,内轴带动车轮与履带驱动轮运动,履带驱动轮通过履带将动力传递给从动轮与承重轮,从而使履带进行运动,实现所述移动机器人的履带式运动与轮式运动。
17.更优选地,车架上传动机构两侧的摆臂驱动电机与传动机构外轴相连,摆臂驱动电机转动带动外轴旋转,外轴上的履带连接板联轴器带动履带连接板运动,从而实现整个摆臂机构运动,实现所述机器人的摆臂运动。
18.更优选地,车架上各部分运动都由独立电机驱动,通过控制不同电机可以实现各种模式的运动,例如车架左侧采用轮式运动,右侧采用腿式运动,实现所述机器人轮腿式运动模式,利用不同的运动模式翻越不同的障碍,使移动机器人具有较强的环境适应性,通过不同电机的控制,实现机器人自平衡效果。
19.与现有技术相比,本发明具有如下的有益效果:
20.本发明的轮履腿复合式移动机器人将三种基本模式组合到一起,克服了轮式移动
机器人越障性能差、履带式移动机器人运行速度小、腿式移动机器人结构复杂以及控制难度高的运动缺陷,使移动机器人具有“轮式、履带式、腿式、轮履式、腿履式、轮腿式、轮履腿式”七种运动模式,即保证了移动机器人优越的运动能力,又保证了移动机器人较强的越障性能,移动机器人的环境适应能力、灵活性都得到了很大提高。
附图说明
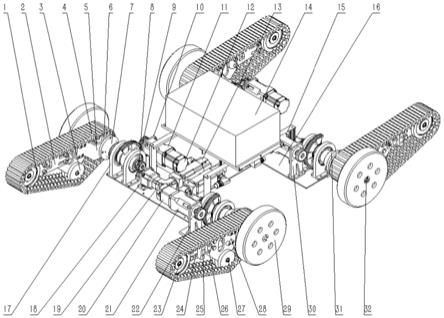
21.图1为本发明的整体结构轴测图;
22.图2为本发明的整体结构俯视图;
23.图3为摆臂机构结构图;
24.图4为传动机构结构图;
25.图5为传动机构剖视图;
26.其中:履带从动轮1,张紧装置连接板2,履带承重轮3,履带4,履带连接板5,履带驱动轮6,履带连接板联轴器7,内轴齿轮啮合8,外轴齿轮啮合9,内摆臂电机支座10,内摆臂电机减速器11,内摆臂电机12,驱动电机13,电池14,电池支架15,车架16,外轴轴承支座17,驱动电机支座18,驱动电机减速器19,外摆臂电机20,外摆臂电机减速器21,外摆臂电机支座22,履带从动轮轴23,履带从动轮板24,外紧固块25,内紧固块26,承重轮轴27,摆臂板28,车轮29,内摆臂电机支座30,外轴31,内轴32
具体实施方案
27.下面结合附图1~5对本发明做进一步说明:
28.如图1所示,一种轮履腿复合式移动机器人,包括车架、动力装置、摆臂机构、传动机构、电池、车轮,其中车架15是摆臂机构与传动机构的载体;四套所述摆臂机构对称分布于车架16的四角;四套所述传动机构对称分布于车架16的四角;
29.所述动力装置包括内摆臂电机支座10、两个内摆臂电机12、四个驱动电机13;
30.所述车架16是一块工字铝板,其中包括驱动电机支座18、两个外摆臂电机20、外摆臂电机支座22、电池支架15,如图2所示,两个内摆臂电机12分布在传动机构内侧,通过内摆臂电机支座10与车架16连接;两个外摆臂电机20分布在传动机构外侧,通过外摆臂电机支座22与车架16连接;四个驱动电机13对称分布在车架16的四角,通过驱动电机支座18与车架16相连;电池支架分布在车架16中部,通过铝型材与车架16连接;
31.如图3所示,所述摆臂机构包括两个履带从动轮1、张紧装置连接板2、两个承重轮3、履带4、履带连接板5、履带驱动轮6、履带从动轮轴23、履带从动轮板24、外紧固块25、内紧固块26、承重轮轴27、摆臂板28,两个履带从动轮1通过轴承和履带轮轴固定在履带从动轮板24上;两个承重轮3通过轴承和承重轮轴固定在摆臂板28上;张紧装置连接板2左边通过螺钉螺母与履带从动轮板24连接,右边通过螺钉螺母与摆臂板27连接,螺钉可以在履带从动轮板24的槽内进行滑动;外紧固块25通过螺钉固定在履带从动轮板24上;内紧固块26通过螺钉固定在摆臂板27上,通过调节内紧固块26上的螺钉的松紧程度可以达到张紧履带4的作用;履带4包裹着两个履带从动轮1与两个承重轮3,在履带从动轮1与承重轮3的作用下履带呈现为三角形;驱动电机13转动并且驱动内轴31带动履带驱动轮6进行运动,履带驱动轮6通过履带将动力传递给承重轮3与履带从动轮1,从而实现移动机器人履带式运动。
32.所述摆臂机构中,履带从动轮板24、张紧装置连接板2、摆臂板28、履带连接板5组成一条腿,履带连接板5与传动机构上的履带连接板联轴器7相连;内摆臂电机12与外摆臂电机20通过摆臂电机减速器,将动力传递给外轴31,外轴上的履带连接板联轴器7将带动履带装置进行旋转运动,从而实现机器人的腿式运动。
33.如图4、图5所示,传动机构由内轴32、外轴31、履带连接板联轴器7、内轴齿轮啮合8、外轴齿轮啮合9组成,其中内轴32通过轴承与外轴31相连;外轴31通过轴承与外轴轴承支座相连;履带连接板联轴器7通过键与紧定螺钉固定在外轴31上;内轴齿轮啮合8安装在内轴32的轴端;外轴齿轮啮合9安装在外轴31的中间;履带驱动轮6与车轮29通过键槽与轴套安装在内轴31上,四个驱动电机13旋转通过驱动电机减速器19将动力传递给内轴31,内轴31旋转带动履带驱动轮6与车轮29进行运动,从而实现机器人轮式运动与履带式运动。
34.在实施例中,通过对内摆臂电机12、外摆臂电机20以及驱动电机13的控制可以实现移动机器人轮式、履带式、腿式三种基本运动,此外各部分机构都是由电机独立控制,通过不同的控制电机方法可以实现轮履式、轮腿式等复合方式的运动,在复杂多变的路况下,移动机器人可以通过调整不同运动模式来通过不同路况。具体实现方式如下:
35.当路况较为平坦时,通过驱动内摆臂电机12与外摆臂电机20将摆臂装置升起合适位置,此时车轮29着地,控制驱动电机13转动,驱动电机13带动驱动电机减速器转动,然后经过齿轮啮合将动力传递给内轴31,从而使内轴31上的车轮29进行运动,实现所述机器人的轮式运动。
36.当路况凹凸不平时,通过驱动内摆臂电机12与外摆臂电机20将摆臂装置降低至履带着地,此时控制驱动电机13转动,驱动电机13带动驱动电机减速器19运动,然后经过齿轮啮合将动力传递给内轴31,从而使内轴31上的履带驱动轮6进行运动,从而实现所述机器人的履带式运动。
37.当路况存在较大的障碍物时,通过控制内摆臂电机12与外摆臂电机20将摆臂装置升起,让摆臂装置与障碍物接触,通过控制驱动电机13转动,驱动电机13带动驱动电机减速器19运动,然后经过齿轮啮合将动力传递给内轴31,从而使内轴31上的履带驱动轮6进行运动,腿式与履带式组合搭配翻越障碍,实现了所述机器人复合式运动。
38.本发明在结构上紧凑简单、运动能力与越障能力强,具有较强的自适应平衡能力,可以根据不同路况,切换不同运动模式,实现多模式运动的优点。
39.以上所述仅为本发明的较佳实施例之一,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
40.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。