1.本发明涉及机器人技术领域,具体涉及一种巡检机器人,用于隧道和地下空间内以及建筑群突发事故巡检。
背景技术:
2.随着高速公路隧道里程和车流量的增加,隧道设备设施种类也逐渐增多,这给隧道日常维护和管理带来较大压力。目前隧道的运行巡检和维护主要以人工为主,存在耗时长、效率低、易漏检、检测结果的准确性受限于日常养护人员观察和仪器检测及时性等问题,导致隧道管理者难以快速做出准确的判断。另外,近年来多地发生隧道火灾、燃爆、坍塌等事故,事故发生前后,内部环境较为复杂且不易被了解,使得救援难度较大,因此,可以利用巡检机器人小巧、动作快、探测效率高等优点,帮助我们了解事故的具体情况,但是目前的巡检机器人也存在一些不足之处:
3.(1)目前已知的巡检机器人中,针对隧道和地下空间火灾、燃爆、坍塌等突发事故的灾前、灾中和灾后巡检、探测和研判的种类空缺;
4.(2)现有的巡检机器人缺乏耐高温、抗冲击的能力,不能完全适应隧道、地铁轨道等的紧急突发事件如火灾、坍塌时高温、石块撞击、冲击等的复杂环境;
5.(3)现有巡检机器人存在运动速度慢的缺点。
技术实现要素:
6.本发明主要针对公路隧道、地铁隧道、地下空间和建筑群环境,提供了一种可以避免干扰车辆正常运行且具备一定探测能力、运动速度较快的巡检机器人,可以进行日常的巡检,配合工作人员进行隧道、地铁隧道、地下空间和建筑群的维护,同样也适用于突发事故的侦测。本发明通过真空吸盘与螺旋桨的配合作用,可达到使巡检机器人附着于壁面运动的效果,其主要目的为提高巡检机器人的运动速度,改变传统巡检机器人的运动形式,解决了其仅能在路面上运动而影响巡检工作进行的技术问题,同时避免了巡检机器人在巡检工作中对隧道车流正常运行造成干扰,对提高巡检机器人的巡检能力有重要意义。
7.本发明为解决以上技术问题采用如下技术方案:
8.一种巡检机器人,所述机器人包括机身结构、附着机构、探测结构、运动机构、无线电通信机构、疏散机构以及散热机构;
9.所述机身机构包括上机壳(9)、下机壳(8)、前侧板(19)、后侧板(23),所述上机壳(9)、下机壳(8)两者通过卡扣、凹槽固定连接,共同构成所述巡检机器人其他零部件的安装基架——车厢,所述前侧板(19)、后侧板(23)分别固定安装在车厢的前侧和后侧;
10.所述附着机构包括螺旋桨(15)、螺旋桨输出轴(17)、螺旋桨驱动电机(16)、爬行腿真空吸盘(6)、车轮真空吸盘(25)、真空总气管(36)、爬行腿真空支气管(38)、车轮真空支气管(37)、真空泵(31)、真空发生器(35)以及转速传感器(34),电机架安装在下机壳(8)中部中空处,并与下机壳(8)固定连接,螺旋桨驱动电机(16)安装在所述下机壳(8)上的电机架
上并与螺旋桨输出轴(17)相连,螺旋桨(15)则安装在螺旋桨输出轴(17)上,其桨叶高度与所述上机壳(9)上平面平齐;
11.所述运动机构包括两对驱动轮(24)、四个驱动转向器(26)、一对驱动轮驱动电机(43)、四个减震器以及六个爬行腿,对应所述下机壳(8)的两侧前后分别设有四个所述驱动转向器(26),每个驱动转向器(26)与一个相应的驱动轮(24)固定连接,驱动轮(24)与驱动轮驱动电机(43)相连;每个驱动轮(24)上各安装六个车轮真空吸盘(25)并配备一个真空总气管(36),每个车轮真空吸盘(25)分别与各自的车轮真空支气管(37)相连,而该六个车轮真空支气管(37)与所述一个真空总气管(36)连接,各驱动轮(24)的真空总气管(36)与真空泵(31)连接,真空泵通过导线与真空发生器(35)相连,真空发生器(35)通过导线与转速传感器(34)相连,转速传感器(34)又通过导线与所述螺旋桨驱动电机(16)电枢轴相连;所述真空泵(31)、真空发生器(35)、转速传感器(34)均安装在下机壳(8)内部表面上。
12.进一步的,所述探测机构包括红外线温度传感器(10)、烟雾传感器(12)、粉尘浓度传感器(14)、有毒害气体检测仪(13)、激光测距传感器(11)、红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)、高清耐高温摄像头(21)、uwb定位标签(42)和led射灯组(20),且所述红外线温度传感器(10)、烟雾传感器(12)、粉尘浓度传感器(14)、有毒害气体检测仪(13)、激光测距传感器(11)、红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)、高清耐高温摄像头(21)和led射灯组(20)均安装在上机壳(9)上,摄像头机架固定安装在上机壳(9)上表面前端位置,其中高清耐高温摄像头(21)安装在摄像头机架上,led射灯组(20)中的两个led灯则分别安装在摄像头机架两侧。
13.进一步的,所述无线电通信机构包括无线电收发装置(39)、天线(18),无线电收发装置(39)安装在车厢内部机架上,而天线(18)安装在上机壳(9)上表面。
14.进一步的,所述疏散机构主要由一对电喇叭(22)和一对微型投影仪(41)组成,两个电喇叭(22)分别安装在所述两个摄像头机架的侧面,而两个微型投影仪(41)分别安装在两个摄像头机架后方。
15.进一步的,所述散热机构包括真空泵(31)、隔热机构真空管(32)、冷却液、冷却液容器(33);真空泵(31)与隔热夹层之间通过导管连接,冷却液容器(33)安装在隔热夹层内,冷却液容器(33)内置冷却液,所述隔热夹层为冷却液容器(33)外表面与下机壳(8)内表面之间的夹层空间。
16.进一步的,所述下机壳前后端安装有所述减震器,所述减震器一端与驱动轮驱动电机(43)输出轴外表面的输出轴外壳连接,另一端分别与前侧板(19)或后侧板(23)相连;所述减震器由弹簧(29)、弹簧压板(27)组成。
17.进一步的,每个所述爬行腿的结构特征相同,均包括爬行腿真空吸盘(6),支撑腿固定轴关节(4),支撑腿(5),支撑腿旋转轴关节(7),伸缩腿固定轴关节(1),伸缩腿旋转轴关节(2),伸缩腿(3)和爬行腿驱动电机(58);所述机身左右两侧各有两条爬行腿,机身前后各有一条爬行腿;机身左右两侧的所述爬行腿安装在下机壳(8)左右两侧,前后两条爬行腿分别固定安装在前侧板(19)和后侧板(23)上;所述伸缩腿一端与支撑腿通过支撑腿固定轴关节(4)和支撑腿旋转轴关节(7)连接,机身左右两侧的四条爬行腿的另一端与固定安装在下机壳(8)内部的侧面上的爬行腿驱动电机(58)连接,前后两条爬行腿的另一端与固定安装在前后侧板内侧的爬行腿驱动电机(58)连接;所述各爬行腿上的爬行腿真空吸盘(6)与
外接导管的真空泵(31)相连。
18.本发明的有益技术效果如下:
19.(1)本发明特征包括附着机构、探测结构、运动机构、无线电通信机构、疏散机构、散热机构以及机身结构,各机构互相配合,克服了现有巡检机器人运动形式单一易对车流造成影响重要技术问题,提高了巡检机器人的运动速度,探测能力、散热能力以及抗冲击能力,除此之外,巡检机器人还具备有智能疏散功能。
20.(2)附着机构主要通过真空吸盘与螺旋桨两个特征配合,达到了可使巡检机器人附着于壁面的技术效果,为巡检机器人提供了一种新型的运动形式,避免了车流与巡检机器人之间运动的互相影响,间接提高了巡检机器人的运动速度,此为本发明重要创造性之一。
21.(3)探测机构采用多传感器融合和uwb标签定位的方法,不仅可在火情、坍塌、粉尘爆炸等多种事故环境下进行检测和位置定位,还提高了巡检机器人探测的全面性和准确度。高清耐高温摄像头与led射灯组配合使用,可侦测高温极端环境下的现场情况画面,也可达到配合运动机构越障的效果。隧道火灾探测,具有固移结合的特点,隧道火灾侦测和报警响应时间不大于15秒。
22.(4)运动机构中具备驱动轮以及爬行腿,使巡检机器人具有越障、快速运动的功能,提高了机器人的运动能力。驱动转向器提高了机器人的转向能力,使其运动更加轻巧;而减震器则大大提高了巡检机器人的抗冲击能力,保证了运动的稳定性。
23.(5)无线电通信机构利用无线电收发装置,可实现数据实时传输的功能,保证了人机之间的互动能力,保证工作人员能够第一时间了解现场情况并做出正确判断和解决措施。
24.(6)疏散机构通过电喇叭和微型投影仪,利用现场环境作为投影屏,在现场投射疏散标志,可达到协助现场人员、车辆迅速疏散的目的。
25.(7)散热机构与附着机构公用一套真空泵,减轻了巡检机器人重量,使结构更加简单,利用真空泵抽压降低冷却液沸点达到冷却液气化迅速降温的效果,提高了巡检机器人的耐高温性能和散热能力。
26.(8)本发明提供的巡检机器人,可以实现在壁面上的快速移动,通过螺旋桨产生的空气反作用力、真空吸盘的吸力和车轮与壁面的摩擦力使机器人附着在壁面上,带有驱动电机的驱动轮实现巡检机器人的前后运动,驱动转向机构可以控制巡检机器人的运动转向。这种在壁面上运动的方式,可以防止机器人在路面上运动而影响正常的车流和地铁的运行。
27.(9)本发明的巡检机器人所包括的探测机构,可以探测具体的工作环境的情况,高清耐高温摄像头可实现360
°
探测障碍物和现场场景,并通过无线电通信机构实时发送环境情况信息。针对隧道以及地铁轨道事故中经常出现的火灾、浓烟、粉尘、渗水、剥落、变形、裂缝以及有毒有害气体浓度过高等问题,巡检机器人分别通过红外温度传感器、烟雾传感器、粉尘浓度传感器、红外渗漏检测仪、红外剥落探测装置、隧道变形报警装置、激光测距传感器和有毒害气体检测仪进行实时检测,工作人员可以根据传感器探测到的数据信息和摄像头的图像信息判断事故的发生位置,同时也可以代替人员进行事故的检测工作,避免不必要的人员伤亡。
28.(10)本发明的巡检机器人结构简单,具备耐高温、抗冲击能力强的特点,工作可靠,更加适合在隧道、地铁轨道、地下空间内以及建筑群之间工作和火灾等事故发生后的探测工作。
附图说明
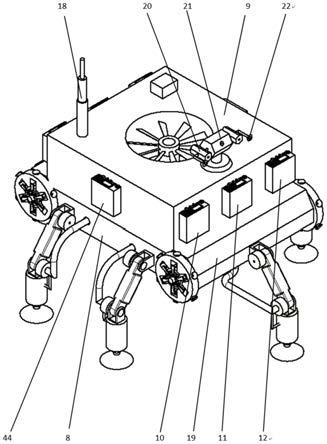
29.图1为本发明前侧斜视图;
30.图2为本发明后侧斜视图;
31.图3为螺旋桨机构立体图;
32.图4为运动机构立体图;
33.图5为行走越障机构立体图;
34.图6为隔热机构立体图;
35.图7为真空管道示意图;
36.图8为隧道火灾探测系统示意图。
37.其中:1伸缩腿固定轴关节、2伸缩腿旋转轴关节、3伸缩腿、4支撑腿固定轴关节、5支撑腿、6爬行腿真空吸盘、7支撑腿旋转轴关节、8下机壳、9上机壳、10红外温度传感器、11激光测距传感器、12烟雾传感器、13有毒害气体传感器、14粉尘浓度传感器、15螺旋桨、16螺旋桨驱动电机、17螺旋桨输出轴、18天线、19前侧板、20led射灯组、21高清耐高温摄像头、22电喇叭、23后侧板、24驱动轮、25车轮真空吸盘、26转向器、27弹簧压板、28挡板、29弹簧、30紧固螺钉、31真空泵、32隔热机构真空管、33冷却液容器、34转速传感器、35真空发生器、36真空总气管、37车轮真空支气管、38爬行腿真空支气管、39无线电收发装置、40蓄电池、41微型投影仪、42uwb定位标签、43驱动轮驱动电机、44红外渗漏检测仪、45红外剥落探测装置、46隧道变形报警装置、47火源位置、48消防冲锋车、49双波长火焰探测器、50光纤光栅感温探测器、51巡检机器人、52信号处理器、53火灾报警控制器、54声光报警器、55监控计算机、56远程监控平台、57广播雷达、58爬行腿驱动电机。
具体实施方式
38.为使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明作进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
39.一种巡检机器人,其包括附着机构、探测结构、运动机构、无线电通信机构、疏散机构、散热机构以及机身结构;如图1、图2所示,机身机构包括上机壳(8)、下机壳(9)、前侧板(19)、后侧板(23),其中,下机壳(8)、上机壳(9)是巡检机器人安装其他零件的基架,红外温度传感器(10)、激光测距传感器(11)、烟雾传感器(12)、有毒害气体传感器(13)、粉尘浓度传感器(14)可分别检测环境温度、障碍物距离、烟雾浓度、有毒有害气体浓度、粉尘浓度。前侧板(19)以及后侧板(23)是保护前后车轮,提供安装位置的零件,led射灯组(20)可为高清耐高温摄像头(21)提供照明,高清耐高温摄像头(21)可对现场情况进行拍摄,电喇叭(22)为智能疏散零件,天线(18)可接收或发送电磁波信号。微型投影仪(41)可投射疏散信号,uwb定位标签(42)可实时提供巡检机器人位置,红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)可分别检测隧道渗漏情况、壁面剥落情况、隧道变形情况。
40.如图6所示,无线电收发装置(39)可实现电信号以及电磁波信号的互相转换,蓄电池(40)为巡检机器人的总动力源,为各零件提供电能。
41.如1-7所示,附着机构包括螺旋桨(15)、螺旋桨输出轴(17)、螺旋桨驱动电机(16)、爬行腿真空吸盘(6)、车轮真空吸盘(25)、真空总气管(36)、爬行腿真空支气管(38)、车轮真空支气管(37)、真空泵(31)、真空发生器(35)以及转速传感器(34),螺旋桨驱动电机(16)安装在车厢下机壳(8)电机架上并与螺旋桨输出轴(17)相连,螺旋桨(15)则安装在螺旋桨输出轴(17)上,高度与车厢上机壳(9)上平面平齐,螺旋桨驱动电机(16)为动力源,为螺旋桨输出轴(17)提供动力而输出转矩使螺旋桨(15)旋转,通过螺旋桨(15)旋转产生对空气的作用力,空气对其也形成一种反向作用力,该力可使巡检机器人附着于壁面上。每个驱动轮(24)上各安装六个车轮真空吸盘(25)并配备一个真空总气管(36),每个车轮真空吸盘(25)分别与各自的车轮真空支气管(37)相连,而六个车轮真空支气管(37)与一个真空总气管(36)连接,各驱动轮(24)的真空总气管(36)与真空泵(31)连接,真空泵通过导线与真空发生器(35)相连,真空发生器(35)通过导线与转速传感器(34)相连,转速传感器(34)又通过导线与螺旋桨驱动电机(16)电枢轴相连。真空泵(31)、真空发生器(35)、转速传感器(34)均安装在车厢内部机架上。车轮真空吸盘(25)及爬行腿真空吸盘(6)可配合螺旋桨(15)完成附着工作,通过转速传感器(34)检测车轮转速,根据转速快慢控制真空泵作用频率,转速越快,真空泵作用频率越大,车轮及爬行腿上的真空吸盘作用频率也变快,这样就实现了真空吸盘随转速变化的效果,增强了巡检机器人的附着能力,保证机器人可以牢牢附着于壁面上。目前市面上还有通过热熔胶、仿生壁虎粘合剂等方式使机器人附着于壁面,但是多具有原理复杂、会致使机器人运动速度变慢的缺点,因此该种方法更适用于巡检工作。
42.探测机构包括红外线温度传感器(10)、烟雾传感器(12)、粉尘浓度传感器(14)、有毒害气体检测仪(13)、激光测距传感器(11)、红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)、高清耐高温摄像头(21)、uwb定位标签(42)和led射灯组(20),如图1及图2所示。实际巡检工作可能会出现隧道火情、坍塌、粉尘爆炸等事故,巡检机器人通过多传感器融合的方式可以对这些事故环境进行全面检测,提供更准确的检测数据信息。且外线温度传感器(10)、烟雾传感器(12)、粉尘浓度传感器(14)、有毒害气体检测仪(13)、激光测距传感器(11)、红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)、高清耐高温摄像头(21)和led射灯组(20)均安装在上机壳(9),高清耐高温摄像头(21)和led射灯组(20)安装在车厢上表面前端位置,其中高清耐高温摄像头(21)安装在两个摄像头机架之间,led射灯组(20)中的两个led灯则分别安装在两个摄像头机架上。led射灯组(20)可以在隧道黑暗的条件下为高清耐高温摄像头(21)提供照明,有利于摄像画面更清晰。
43.如图8所示,隧道火灾探测系统,包括火源位置(47)、消防冲锋车(48)、双波长火焰探测器(49)、光纤光栅感温探测器(50)、巡检机器人(51)、信号处理器(52)、火灾报警控制器(53)、声光报警器(54)、监控计算机(55)、远程监控平台(56)、广播雷达(57),当火灾发生时,巡检机器人会利用高清耐高温摄像头(21),基于时序的深度学习模型的图像火灾探测技术实现对隧道火灾的实时监测,巡检机器人的电喇叭(22)立即发出声音警报,将报警信号传输至信号处理器(52),再经过火灾报警控制器(53),声光报警器(54)会进行一次预警,待报警信号传输至监控计算机(55)和远程监控平台(56),经过人工确定报警信号,实现二
次报警,通过广播雷达(57)疏散人群开展火灾应急救援工作。集合巡检机器人的灾情侦测技术与隧道固有灾情探测技术的优势,形成“固移”结合快速侦测,侦测和报警响应时间不大于15秒,实现对隧道灾情快速响应,提升应急救援时效性。
44.运动机构包括两对驱动轮(24)、四个驱动转向器(26)、一对驱动轮驱动电机(43)、四个减震器以及六个爬行腿,对应所述下机壳(8)的两侧前后分别设有四个所述驱动转向器(26),每个驱动转向器(26)与一个相应的驱动轮(24)固定连接,驱动轮(24)与驱动轮驱动电机(43)相连。如图4,驱动轮驱动电机(43)可以驱动驱动轮(24)运动。减震器一端与输出轴壳连接,另一端与侧板相连。所述减震器由弹簧(29)、弹簧压板(27)组成。弹簧(29)为弹性元件可缓冲冲击,弹簧压板(27)是弹簧的安装基架,挡板(28)可将减震器与驱动转向器(26)、驱动轮驱动电机(43)隔开,紧固螺钉(30)连接了弹簧压板(27)与挡板(28)。驱动转向器(26)为转向机构主要零件,可以改变力的传递方向,从而使巡检机器人的运动方向发生改变,达到转向的目的;利用所述减震器可以将巡检机器人运动过程中所遇外界干扰及振动冲击由车轮传至机身,衰减其振动,提高巡检机器人抗冲击振动的能力,相比于其他软质材料减震器的做法,本发明的所述减震器阻尼比更大,且不易受高温条件影响,更适合巡检工作要求。
45.所述每个爬行腿的结构特征相同,均包括爬行腿真空吸盘(6),支撑腿固定轴关节(4),支撑腿(5),支撑腿旋转轴关节(7),伸缩腿固定轴关节(1),伸缩腿旋转轴关节(2),伸缩腿(3),所述机身左右两侧各有两条爬行腿,机身前后各有一条爬行腿。如图5所示,所述伸缩腿(3)与机身通过伸缩腿固定轴关节(1)和伸缩腿旋转轴关节(2)连接,所述伸缩腿(3)与支撑腿(5)通过支撑腿固定轴关节(4)和支撑腿旋转轴关节(7)连接,所述各爬行腿上的爬行腿真空吸盘(6)与外接导管真空泵(31)相连。爬行腿上安装了真空吸盘,当隧道发生部分壁面坍塌或出现裂缝时,巡检机器人难以单纯依靠驱动轮(24)越过障碍稳定行驶,此时机器人后部及两侧靠前共三只爬行腿可成三点支撑保证其附着于壁面上,剩余三只腿向前迈出,越过障碍;越过障碍后,巡检机器人前部及两侧后部共三条腿上真空吸盘作用,使机器人附着于壁面上,而另外三条腿向前迈出完成一个前进动作。依此往复动作,可越过多个障碍。该结构提高了巡检机器人的适应性及运动能力。
46.无线电通信机构包括无线电收发装置(39)、天线(18),无线电收发装置(39)安装在车厢内部机架上,而天线(18)安装在车厢上表面。通过该装置可将探测机构采集到的图像以及数据的电信号转换为电磁波并实时发送给工作人员;反之,工作人员也可以对巡检机器人发送命令,无线电收发装置(39)可以将天线(18)接收到的电磁波信号转换为巡检机器人可以识别的电信号,完成接受命令的动作。该机构使巡检机器人具有人机的互动性。
47.疏散机构主要由一对电喇叭(22)和一对微型投影仪(41)组成,两个电喇叭(22)分别安装在两个摄像头机架的侧面,而两个微型投影仪(41)分别安装在两个摄像头机架后方,如图1所示。该机构为巡检机器人提供了智能疏散的功能,为协助人员、车辆疏散,降低人员的伤亡率起到了重要作用。具体实施方式为:当探测机构检测到现场危险数据超过临界值时,巡检机器人控制电喇叭发出警报,微型投影仪可以利用隧道壁面或地板作为投影屏,投射疏散信号。
48.散热机构如图6所示,包括真空泵(31)、隔热机构真空管(32)、冷却液、冷却液容器(33)等。真空泵(31)与隔热夹层之间通过导管连接,冷却液容器(33)安装在隔热夹层内,冷
却液容器(33)内置冷却液。冷却液容器(33)用于承装冷却液。该机构与附着机构共用一套真空泵(31),利用真空泵抽压降低冷却液沸点达到冷却液气化迅速降温的效果,提高巡检机器人的耐高温和散热能力,使巡检机器人具备在高温环境下工作的能力。对比于一般的水冷方式,该方法可使巡检机器人不必具备水泵等装置,减轻了巡检机器人的重量,使其结构更加简单;而风冷方式可能在隧道坍塌、粉尘爆炸等事故环境下造成大量粉尘进入机器人内部,对零件产生不良影响。在散热机构中,真空泵直接通过隔热机构真空管(32)对散热机构进行抽压。真空发生器(35)可控制真空泵的动作时机。
49.另外,如图7所示,巡检机器人的真空管道主要包括真空总气管(36)、车轮真空支气管(37)、爬行腿真空支气管(38)。对于运动机构真空泵抽压主要有两条路径。对驱动轮(24)上的真空吸盘进行抽压时,抽压路径为真空泵(31)、真空总气管(36)、车轮真空支气管(37);对爬行腿上的真空吸盘进行抽压时,抽压路径为真空泵(31)、真空总气管(36)、爬行腿真空支气管(38)。
50.上述本发明的巡检机器人,可对多种灾害能够实现隧道内火灾、粉尘爆炸等灾害场景内的自由移动,以及对灾害进行实时检测,具体包括以下几种情况:
51.情况1:巡检机器人在隧道和地下空间内展开正常巡检工作时
52.巡检机器人在日常巡检工作中,巡检机器人会启动螺旋桨(15),而转速传感器(34)会感知螺旋桨直流串励式电机的转速而产生电信号,并将转速信号传给真空发生器(35),输出控制信号控制真空泵(31)的动作频率,从而达到根据螺旋桨(15)转速控制真空吸盘的吸附频率的目的。巡检机器人通过螺旋桨产生的空气反作用力和真空吸盘的吸附力使其附着在墙面上。驱动电机又将驱动车轮(24)转动,从而使巡检机器人能够稳定地在隧道或地铁道口壁面运动。
53.运动过程中巡检机器人可以根据激光测距传感器(10)感知自身周围情况,判断是否有障碍物和裂缝,当感知到存在障碍物时,转向器动作,使巡检机器人避开障碍物;当感知到隧道出现裂缝时,将会将裂缝的信息和出现裂缝的位置报告给控制终端。
54.巡检机器人通过红外温度传感器(10)、烟雾传感器(12)、粉尘浓度传感器(14)、红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)和有毒害气体检测仪(13)对工作环境进行实时探测,同时高清耐高温摄像头(21)实时监测隧道及地铁轨道内的情况,并通过无线电通信机构,向控制中心发送有关环境情况的信号,达到对隧道和地铁轨道日常巡检工作的目的。考虑到隧道及地铁轨道环境较为黑暗,因此还在高清耐高温摄像头(21)两端安装了led灯组(20),提供照明作用。
55.情况2:巡检机器人在隧道和地下空间发生火情时响应
56.当隧道内发生火情时,采用高清耐高温摄像头(21),基于时序的深度学习模型图像火灾探测技术识别火灾烟气时空特征,巡检机器人的电喇叭(22)立即发出声音警报,将报警信号传输至信号处理器(52),再经过火灾报警控制器(53),声光报警器(54)会进行一次预警,待报警信号传输至监控计算机(55)和远程监控平台(56),经过人工确定报警信号,实现二次报警,通过广播雷达(57)疏散人群开展火灾应急救援工作;与此同时,安装在摄像头架上的两个微型投影仪(41)将利用隧道的壁面或路面投影有关疏散的信息,使现场的车辆与人员能够有序撤离。同时巡检机器人利用红外温度传感器(10)对隧道内的温度进行探测,并根据探测到的温度情况,确定火源方向,通过控制运动机构使机器人代替检测人员靠
近火源进行探测工作,获取隧道火灾时空演化特征参数。
57.巡检机器人到达现场后,红外温度传感器(10)对现场温度进行检测,有毒害气体传感器(13)对现场有毒害气体浓度进行检测,烟雾浓度传感器(12)也会根据现场烟雾的浓度情况输出一个信号。基于巡检机器人的火灾侦测技术与隧道固有火灾探测技术,实现“固移结合”隧道火灾侦测技术,集成不同探测技术的优势,实现隧道火灾的实时监测与快速响应。
58.当采集完上述信号和影像后,巡检机器人将通过内部的无线电通信机构向工作人员汇报现场情况与实际数据。
59.对于事故现场产生的高温,巡检机器人中的真空泵(31)会抽取夹层内的气体,减小夹层内的气压,冷却液的沸点随之降低。冷却液更容易汽化,使机器人表面得到快速的冷却,从而达到降温散热的目的。
60.情况3:巡检机器人在隧道和地下空间发生坍塌事故时
61.当隧道发生坍塌事故时,在壁面坍塌情况比较严重的情况下,巡检机器人可以直接在路面上移动,此时应主要依靠爬行腿进行移动,前进时,机身前、后两腿以及左右侧两只后腿保持不动起支撑作用,机身左右侧前腿向前迈出,随后机身前、后两腿以及左右侧两只前腿保持不动起支撑作用,机身左右侧后腿向前迈出,完成前进动作。并通过激光测距传感器(11)判断前方障碍物,逐渐移动进入隧道侦测事故情况与人员受灾情况;在壁面部分坍塌的情况下,巡检机器人则通过螺旋桨(15)与真空吸盘产生的附着力,使其附着于墙面上,并通过车轮驱动电机(43)带动巡检机器人运动前进,当遇到壁面坍塌位置车轮无法继续前进时,也可利用爬行腿进行越障动作,动作原理同上,值得注意的是,此时爬行腿上的真空泵(31)受真空发生器(35)控制,带动真空吸盘动作,使机器人能够附着于壁面上,侦测隧道内部现场情况。
62.巡检机器人在运动过程中,电喇叭(22)将发出警报信号,提醒人员撤离,而微型投影仪(41)将指示安全的撤离方向和路径,提示人员正确的撤离方向。
63.巡检机器人将通过粉尘浓度传感器(14)、红外渗漏检测仪(44)、红外剥落探测装置(45)、隧道变形报警装置(46)对受灾区域的粉尘浓度、渗水情况、壁面剥落和变形情况等进行检测和报警,并通过高清耐高温摄像头(21)对现场情况进行影像记录,巡检机器人通过无线电通信机构将现场采集记录到的情况发送给工作人员。当侦测到受困人员需要帮助时,巡检机器人将移动至受困人员附近并利用uwb定位标签(42)记录并发送位置信息。
64.面对坍塌事故中飞石、落石对巡检机器人的撞击而产生的震动,可以通过与驱动车轮输出轴壳和车架相连的减震器缓冲;巡检机器人在路面上行驶时,也可以利用减震器减少不平路面对巡检机器人行驶运动的影响,从而提高巡检机器人的抗冲击、抗振动性能。
65.情况4:巡检机器人在隧道和地下空间发生粉尘爆炸事故时
66.针对隧道内发生的粉尘爆炸事故,巡检机器人首先通过粉尘浓度传感器(14)和红外温度传感器(10)对事故环境的粉尘浓度以及温度进行探测,当粉尘浓度超过或温度超过预定值时,疏散机构将发出警报,提醒人员撤离。另外,巡讲机器人还将通过高清耐高温摄像头记录现场事故情况,并将视频发送至工作人员或指挥中心。
67.情况5:巡检机器人建筑群发生突发事故时巡检
68.巡检机器人在建筑群内日常巡检工作中,巡检机器人会启动螺旋桨(15),而转速
传感器(34)会感知螺旋桨直流串励式电机的转速而产生电信号,并将转速信号传给真空发生器(35),输出控制信号控制真空泵(31)的动作频率,从而达到根据螺旋桨(15)转速控制真空吸盘的吸附频率的目的。巡检机器人通过螺旋桨产生的空气反作用力和真空吸盘的吸附力使其附着在建筑墙面上。驱动电机又将驱动车轮(24)转动,从而使巡检机器人能够稳定地在建筑壁面不同角度运动。不同建筑之间可以通过轨道实现不同建筑之间的巡检,或者加强无人机作用转移巡检机器人在建筑群内部作业。
69.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围内。