1.本实用新型涉及农业生产技术领域,特别涉及一种温室大棚果蔬运输遥控轨道车。
背景技术:
2.温室大棚是一种具有出色的保温性能的墙、框架、覆膜结构,它出现使得人们可以吃到反季节蔬菜、水果。一般温室大棚使用竹结构或者钢结构的骨架,上面覆上一层或多层保温塑料膜,这样就形成了一个温室空间,温室蔬菜生产逐步成为设施蔬菜创建高产、高效的重要生产方式。研发省力采摘运输车可适用于规模化、标准化的蔬菜种植大棚,通常由手动和遥控两种操作方式组成,通过轨道轮和行走轮可实现在单轨道上轻松自由前后行走。
3.现有的大棚运输用轨道车,运输量较小,导致作业效率低,而且现有设备结构复杂,不便于安装,价格昂贵,安全性能差,实用性不强。
技术实现要素:
4.本实用新型针对以上问题,提出一种温室大棚果蔬运输遥控轨道车来解决上述问题。
5.本实用新型是这样实现的,一种温室大棚果蔬运输遥控轨道车,包括车体、驱动箱、和控制器,所述驱动箱设置于车体的下端面中部,所述控制器设置于车体的前端面左侧,所述驱动箱的内部安装有两个无刷电机控制器,所述车体左右两侧均固定连接有两个前后分布的安装板,位于右侧两个安装板分别通过轮轴安装有驱动轮,两个所述无刷电机控制器分别与两个驱动轮电性连接,两个所述驱动轮的下方设置有轨道,两个所述驱动轮的外壁与轨道的上端面抵接,位于左侧两个安装板分别通过轮轴安装有载重轮,所述车体的下端面设置有操作面板,所述操作面板位于驱动箱的前方,所述操作面板与驱动箱电性连接,所述操作面板的前端面分别设置有充电口和电量显示,所述电量显示位于充电口的下方,所述车体的前后两端面均安装有红外线感应器,两个所述红外线感应器均与驱动箱电性连接。
6.为了对设备进行供电,便于设备的驱动及其它用电,作为本实用新型的一种温室大棚果蔬运输遥控轨道车优选的,所述驱动箱的内部安装有铅蓄电池,所述铅蓄电池分别与两个驱动轮电性连接。
7.为了便于设备在温室大棚里的狭小过道行走,作为本实用新型的一种温室大棚果蔬运输遥控轨道车优选的,所述车体的尺寸为长190cm,宽50cm,高40cm。
8.为了提高两个载重轮的耐磨性和耐压性,有利于提高设备的运输量,作为本实用新型的一种温室大棚果蔬运输遥控轨道车优选的,两个所述载重轮的外壁均设置有实心橡胶外胎。
9.为了便于工作人员手动推拉设备移动,作为本实用新型的一种温室大棚果蔬运输遥控轨道车优选的,所述车体的前端面设置有把手,所述把手与车体通过套管连接并用螺
丝固定。
10.为了便于控制设备的运行,作为本实用新型的一种温室大棚果蔬运输遥控轨道车优选的,所述控制器的前端面从左至右依次设置有前进键、停止键和后退键。
11.与现有技术相比,本实用新型的有益效果是:
12.该种温室大棚果蔬运输遥控轨道车,通过两个驱动轮和两个载重轮的设置,提高了设备运行的稳定性和载重力,通过铅蓄电池给设备整体通电,然后通过控制器前端面的三个控制键同时启动两个无刷电机控制器,两个无刷电机控制器可以分别控制两个驱动轮的转动速度,调节车体的行走速度,设计有3个档位,可通过按键加减速,从而带动车体在轨道上水平移动,通过采用双电机驱动在轨道上运行,单个驱动轮的动力为500w,每个驱动轮分别有独立的无刷电机控制器,两个驱动轮在同一侧,这样设计的优势是在配载的重力不均衡和地面不平的情况下,避免了设备单个驱动轮悬空打滑时不前进的问题,通过另外一侧设置有两个载重轮,保证其在重载时的平衡性,从而提高了设备的运输量,两个驱动轮是带槽型外边的金属轮,只需安放在轨道上运行,结构简单,价格低廉,安装方便,电量显示可显示电池电量,有利于工作人员对设备的使用,如果电量过低,可通过充电口给铅蓄电池充电,通过两个红外线感应器的设置,当车体移动过程中遇到障碍物,两个红外线感应器将实时信息传导至控制器,自动控制两个驱动轮停止运行,有效避免了车体移动过程中发生碰撞,大大提高了设备的安全性能。
附图说明
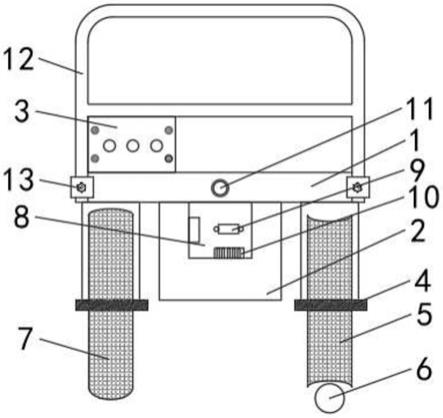
13.图1为本实用新型正视图;
14.图2为本实用新型左视图;
15.图3为本实用新型俯视图;
16.图4为本实用新型车体左右视图。
17.图中,1、车体;2、驱动箱;3、控制器;4、安装板;5、驱动轮;6、轨道;7、载重轮;8、操作面板;9、充电口;10、电量显示;11、红外线感应器;12、把手;13、螺丝。
具体实施方式
18.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
19.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
20.请参阅图1-4,一种温室大棚果蔬运输遥控轨道车,包括车体1、驱动箱2、和控制器3,驱动箱2设置于车体1的下端面中部,控制器3设置于车体1的前端面左侧,驱动箱2的内部安装有两个无刷电机控制器,车体1左右两侧均固定连接有两个前后分布的安装板4,位于
右侧两个安装板4分别通过轮轴安装有驱动轮5,两个无刷电机控制器分别与两个驱动轮5电性连接,两个驱动轮5的下方设置有轨道6,两个驱动轮5的外壁与轨道6的上端面抵接,位于左侧两个安装板4分别通过轮轴安装有载重轮7,车体1的下端面设置有操作面板8,操作面板8位于驱动箱2的前方,操作面板8与驱动箱2电性连接,操作面板8的前端面分别设置有充电口9和电量显示10,电量显示10位于充电口9的下方,车体1的前后两端面均安装有红外线感应器11,两个红外线感应器11均与驱动箱2电性连接。
21.本实施例中:充电口9可接受48v充电器充电,电量显示10显示当前蓄电池电压与电量,本设备可使用遥控器与控制器3无线连接,轨道车可以用遥控器控制,实现遥控的功能,有把手12的一端为前进方向,前进或后退均有高速和低速,通电状态下按一下前进键,轨道车以低速向前行驶,再按一下前进键以高速行驶,此时按后退键会降为低速,再按一下后退键会停止并刹车,另一个方向操作相同,在任何速度运行时按停止键都会停止和刹车,遥控器有3个按键,上键对应前进方向,下键对应后退方向,中间按键是停止键,操作方法与轨道车上按键操作相同,低速速度一般为0.8米/s—1.2米/s,和成年人步行行速度相近,高速速度为1.5米/s—2.5米/s;轨道车的设计是采用双电机驱动在单轨道上运行,单个驱动轮5的动力为500w,每个电机有独立的无刷电机控制器,两个动力轮在同一侧,这样设计的优势是在配载的重力不均衡和地面不平的情况下,避免了轨道车单个动力轮悬空打滑时不前进的问题,另外一侧设计为两个带有实心橡胶外胎的载重轮7,保证其在重载时的平衡性;两个驱动轮5是带槽型外边的金属轮,需安放在钢轨上运行,可使用外径为25mm的镀锌钢管固定在地面上当轨道6;轨道车前后配备有红外线感应器11,以保证实用性和安全性,安全检测距离一般设置为1.5—2米;红外线感应器11灵敏度高、响应速度快,主控器在收到有障碍物信号后立刻给电机控制器断电并启动电子刹车,能避免在运行过程中发生碰撞,电子刹车每次刹车的时间为3秒,低速行驶状态下的刹车距离为0.8—1米,高速行驶时的刹车距离为1.2—1.5米,有效的减少了因惯性滑行的距离,其余时间轨道车都可以自由推行,当前进方向有障碍物,在红外线感应器11的工作距离范围内时驱动箱2不会启动,铅蓄电池为48v12ah规格,充满一次电可行驶20—30千米,在百米长的棚里可行驶100余个来回,长时间不用的情况下建议关闭电源开关并每月充电一次;主控器才采用stm32f103c8t6单片机作为控制芯片,stm32f103c8t6是一款基于arm cortex-m内核stm32系列的32位的微控制器,程序存储器容量是64kb,需要电压2v~3.6v,工作温度为-40℃~85℃。主要功能是控制无刷电机控制器的正转、反转和停止,控制两个驱动轮5的速度,检测障碍物,接收按键命令,接收遥控命令,控制电子刹车,处理相关逻辑;遥控模块一般采用433mhz配对码遥控器,灵敏度高,遥控距离空旷地域可达1000米,为应对特殊环境,遥控模块可以选配lora远距离遥控模块,遥控距离可达3000米,设备整体设计简单,只需要铺设一根钢管便可以使用,经济实惠,安装方便,实用性强。
22.作为本实用新型的一种技术优化方案,驱动箱2的内部安装有铅蓄电池,铅蓄电池分别与两个驱动轮5电性连接。
23.本实施例中:通过两个铅蓄电池对设备进行供电,便于设备的驱动及其它用电。
24.作为本实用新型的一种技术优化方案,车体的尺寸为长190cm,宽50cm,高40cm。
25.本实施例中:通过将车体1的尺寸设置为狭长结构,便于设备在温室大棚里的狭小过道行走。
26.作为本实用新型的一种技术优化方案,两个载重轮7的外壁均设置有实心橡胶外胎。
27.本实施例中:实心橡胶外胎具有良好的耐磨性及耐压性,有利于提高设备的运输量。
28.作为本实用新型的一种技术优化方案,车体1的前端面设置有把手12,把手12与车体1通过套管连接并用螺丝13固定。
29.本实施例中:通过把手12的设置,便于工作人员手动推拉设备移动。
30.作为本实用新型的一种技术优化方案,控制器3的前端面从左至右依次设置有前进键、停止键和后退键。
31.本实施例中:通电状态下按一下前进键,车体1以低速向前行驶,再按一下前进键,车体1以高速行驶,后退键与前进键操作相同,在任何速度运行时按停止键都会停止和刹车,操作方便,便于遥控设备运行。
32.本实用新型的工作原理及使用流程:首先,通过铅蓄电池给设备整体通电,然后通过控制器3前端面的三个控制键同时启动两个无刷电机控制器,两个无刷电机控制器可以分别控制两个驱动轮5的转动速度,调节车体1的行走速度,通过按键加减速,从而带动车体1在轨道6上水平移动,每个驱动轮5分别有独立的无刷电机控制器,两个驱动轮5在同一侧,这样设计的优势是在配载的重力不均衡和地面不平的情况下,避免了设备单个驱动轮5悬空打滑时不前进的问题,通过另外一侧设置有两个载重轮7,保证其在重载时的平衡性,从而提高了设备的运输量,两个驱动轮5是带槽型外边的金属轮,只需安放在轨道6上运行,结构简单,价格低廉,安装方便,电量显示10可显示电池电量,有利于工作人员对设备的使用,如果电量过低,可通过充电口9给铅蓄电池充电,通过两个红外线感应器11的设置,当车体移动过程中遇到障碍物,两个红外线感应器11将实时信息传导至控制器3,自动控制两个驱动轮5停止运行,有效避免了车体1移动过程中发生碰撞,大大提高了设备的安全性能。
33.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。