1.本发明涉及轨电车槽型轨轨道检测设备,特别涉及一种有轨电车槽型轨轨道几何参数测试系统。
背景技术:
2.槽型轨轨道为有轨电车的重要部件,其在工作过程中需要承载较大载荷,其对有轨电车的支撑和导向起到直观重要的作用,因此需要对有轨电车的槽型轨轨道进行几何参数测量。传统的对有轨电车槽型轨轨道几何参数的测量,通过人工巡道方式,结合万能道尺及现场观察测量,存在费时、不够准确等问题。
技术实现要素:
3.针对现有技术的不足,本发明的目的是提供一种有轨电车槽型轨轨道几何参数测试系统。
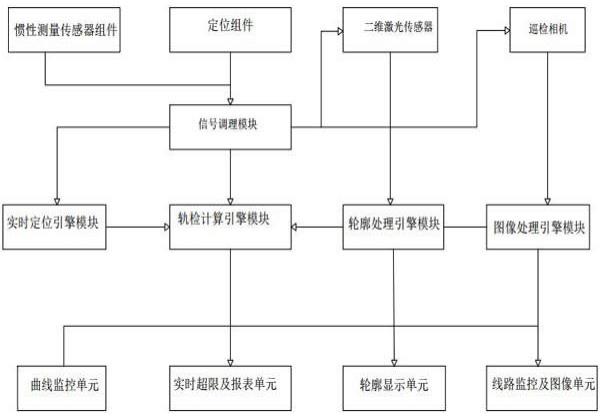
4.本发明解决其技术问题所采用的技术方案是:一种有轨电车槽型轨轨道几何参数测试系统,包括:轨检计算引擎模块、实时定位引擎模块、轮廓处理引擎模块、图像处理引擎模块、信号调理模块、巡检相机、二维激光传感器、惯性测量传感器组件、定位组件、曲线监控单元、实时超限及报表单元、线路监控及图像单元、轮廓显示单元,所述惯性测量传感器组件、所述定位组件、二维激光传感器、所述巡检相机、所述实时定位引擎模块和所述轨检计算引擎均与所述信号调理模块连接,所述轨检计算引擎模块分别与实时定位引擎模块、所述轮廓处理引擎模块、所述曲线监控单元、所述实时超限及报表单元、线路监控及图像单元连接,所述轮廓处理引擎模块连接所述轮廓显示单元和所述二维激光传感器,所述图像处理引擎模块分别连接所述巡检相机、所述线路监控及图像单元、所述曲线监控单元以及实时超限及报表单元;所述惯性测量传感器组件包括陀螺仪、加速度传感器、倾角仪,所述惯性测量传感器组件与二维激光传感器配合,采用激光三角测距原理对钢轨进行扫描,再配合轮廓处理引擎模块对轮廓曲线进行提取和分析,确定轨距的变化,计算合成动态的轨距值,并将动态的轨距值输出给轨检计算引擎模块;所述图像处理引擎模块利用巡检相机配合二维激光传感器,基于激光摄像原理,通过分析摄像机数据,结合二维激光传感器安装角度,计算得到二维激光传感器到轨道横截面上任意一点的距离,并将巡检相机捕捉到的原始视频流文件中的当前帧转换成灰度图像,对灰度图像进行平滑降噪处理,减少噪点、摄像头污点等对目标获取的干扰,最后把数据传递给线路监控及图像单元;所述定位组件包括速度传感器、gps、rfid、高精度光电编码器,所述rfid用于放置轨道上存储轨道信息,所述定位组件利用速度传感器测量车体速度,利用rfid对高精度光电编码器进行修正,实现线路特征点的精确定位,保证车辆经过射频标签时能读取到任意一边的变迁信息进行里程自动校准;
所述信号调理模块用于将所述定位组件和所述惯性测量传感器的信号滤波放大后和实时定位引擎模块共同作用,最后数据传输到所述轨检计算引擎模块;所述轨检计算引擎模块将所述惯性测量传感器组件和所述定位组件传输给信号调理模块的信号进行综合运算分析,进行有效的运算和输出,保证实时超限及报表单元及时报警。
5.上述设计中利用上述各模块和单元实现对钢轨几何参数的自动测量、检测和比对,自动化程度高,提高检测效率,实时超限及报表单元自动实时生成检测报表。
6.作为本设计的进一步改进,所述二维激光传感器为非接触式精确测量的激光二维传感器,其利用漫反射聚焦成像原理测钢轨表面轨道平整度,轨道磨损量,检测速度快,不易损伤传感器。
7.作为本设计的进一步改进,所述巡检相机为高速摄像机,其用于对钢轨表面及两侧状态的图像进行进行实时记录和存储,提高检测效率。
8.本发明的有益效果是:本发明利用上述各模块和单元实现对钢轨几何参数的自动测量、检测和比对,自动化程度高,提高检测效率,实时超限及报表单元自动实时生成检测报表。
附图说明
9.下面结合附图和实施例对本发明进一步说明。
10.图1是本发明的一种有轨电车槽型轨轨道几何参数测试系统结构示意图。
具体实施方式
11.下面将结合附图以及具体实施例来详细说明本发明,其中的示意性实施例以及说明仅用来解释本发明,但并不作为对本发明的限定。
12.实施例:一种有轨电车槽型轨轨道几何参数测试系统,包括:轨检计算引擎模块、实时定位引擎模块、轮廓处理引擎模块、图像处理引擎模块、信号调理模块、巡检相机、二维激光传感器、惯性测量传感器组件、定位组件、曲线监控单元、实时超限及报表单元、线路监控及图像单元、轮廓显示单元,所述惯性测量传感器组件、所述定位组件、二维激光传感器、所述巡检相机、所述实时定位引擎模块和所述轨检计算引擎均与所述信号调理模块连接,所述轨检计算引擎模块分别与实时定位引擎模块、所述轮廓处理引擎模块、所述曲线监控单元、所述实时超限及报表单元、线路监控及图像单元连接,所述轮廓处理引擎模块连接所述轮廓显示单元和所述二维激光传感器,所述图像处理引擎模块分别连接所述巡检相机、所述线路监控及图像单元、所述曲线监控单元以及实时超限及报表单元;所述惯性测量传感器组件包括陀螺仪、加速度传感器、倾角仪,所述惯性测量传感器组件与二维激光传感器配合,采用激光三角测距原理对钢轨进行扫描,再配合轮廓处理引擎模块对轮廓曲线进行提取和分析,确定轨距的变化,计算合成动态的轨距值,并将动态的轨距值输出给轨检计算引擎模块;所述图像处理引擎模块利用巡检相机配合二维激光传感器,基于激光摄像原理,通过分析摄像机数据,结合二维激光传感器安装角度,计算得到二维激光传感器到轨道横截面上任意一点的距离,并将巡检相机捕捉到的原始视频流文件中的当前帧转换成灰度图
像,对灰度图像进行平滑降噪处理,减少噪点、摄像头污点等对目标获取的干扰,最后把数据传递给线路监控及图像单元;所述定位组件包括速度传感器、gps、rfid、高精度光电编码器,所述rfid用于放置轨道上存储轨道信息,所述定位组件利用速度传感器测量车体速度,利用rfid对高精度光电编码器进行修正,实现线路特征点的精确定位,保证车辆经过射频标签时能读取到任意一边的变迁信息进行里程自动校准;所述信号调理模块用于将所述定位组件和所述惯性测量传感器的信号滤波放大后和实时定位引擎模块共同作用,最后数据传输到所述轨检计算引擎模块;所述轨检计算引擎模块将所述惯性测量传感器组件和所述定位组件传输给信号调理模块的信号进行综合运算分析,进行有效的运算和输出,保证实时超限及报表单元及时报警。
13.上述设计中利用上述各模块和单元实现对钢轨几何参数的自动测量、检测和比对,自动化程度高,提高检测效率,实时超限及报表单元自动实时生成检测报表。
14.作为本设计的进一步改进,所述二维激光传感器为非接触式精确测量的激光二维传感器,其利用漫反射聚焦成像原理测钢轨表面轨道平整度,轨道磨损量,检测速度快,不易损伤传感器。
15.作为本设计的进一步改进,所述巡检相机为高速摄像机,其用于对钢轨表面及两侧状态的图像进行进行实时记录和存储,提高检测效率。
16.有轨电车槽型轨轨道部分几何参数检测方式及原理:1、轨距及轨距变化率:轨距为钢轨踏面下16mm范围内两股钢轨工作边之间的最小距离。二维激光传感器在靠近车轮处进行有轮载的轨距检测。轨距检测同时计算轨距变化率。
17.2、轨向:轨向是钢轨内侧轨距点沿轨道延长方向的横向凹凸不平顺。轨向测量时通过惯性测量传感器组件测得的数值经空间解算后得到轨检梁横向凹凸不平顺,再次通过二维激光传感器获得轨检梁与钢轨之间的相对空间关系,然后可以计算轨道内侧面的横向凹凸不平顺。
18.3、钢轨的高低:钢轨的高低指钢轨顶面沿延长方向的垂直凹凸不平顺。钢轨的高低测量时通过惯性测量传感器组件获得数据计算。通过积分运算和修正,计算得到轨检梁的垂向凹凸不平顺,通过二维激光传感器获得轨检梁与钢轨顶面的相对空间关系,最后计算钢轨顶面的出现凹凸不平顺。
19.4、钢轨的超高和三角坑:钢轨的超高为曲线上同一横截面上左右钢轨顶面相对于水平面的高度差;通过惯性测量传感器组件,按规定设置的超高值通过逻辑运算得出及超高坡量;三角坑是左右两轨顶面相对轨道平面的扭曲,通过巡检相机的摄像把再配合轮廓处理引擎模块对轮廓曲线进行提取和分析,最后通过陀螺仪确定三角坑的数值变化。
20.5、曲线和曲率变化率:钢轨的曲率测量采用惯性测量传感器组件中的陀螺仪获取列车运行的角速度,并
通过倾角仪进行补偿后获得曲率参数。最后测量车辆通过时的陀螺仪的转动量,即可计算出轨检车曲线和曲率变化率通过30米曲线后的相应圆心角的变化值。
21.6、车体振动加速度:车体振动加速度通过实时定位引擎模块中的定位组件和惯性测量传感器组件将运动中的车体的数据和静止的数据通过逻辑计算,最后的得出变化值。
22.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。