1.本发明属于机器人技术领域,尤其涉及一种用于改善双足机器人行走稳定性的一体化踝足系统。
背景技术:
2.双足机器人是一种模仿人类身体结构,利用下肢的腿足结构行走的机器人。双足式结构显著增强了机器人的地形适应能力,相较于轮式运动机器人可在一些非平整路面上移动和完成任务。通过大步长仿人步态行走等方式,也可以使得机器人的运动性能得以提升。当前双足机器人已具备一定的稳定行走能力和抵抗外界干扰能力,并可利用布置于躯干处的各类传感器感知身体姿态,保持身体平衡。但由于双足机器人的结构特性,其直接触地部位和运动关节为足部和踝部,采用基于躯干姿态的稳定控制方式,由于传感器距离足踝部较远对足部运动姿态估计的准确性较差,容易造成足部姿态控制不到位,直接影响机器人足部支撑的稳定性。使用同时具备驱动运动和传感处理能力的一体化集成式机器人踝足系统,可将姿态感知和稳定性控制部分直接作用于与地面接触的踝足部分,有效提升机器人稳定控制效率,改善机器人行走稳定性。同时高度紧凑和一体化设计的踝足系统,可作为双足机器人的一个重要运动模块,适配于对足踝部姿态控制要求高的双足机器人本体。
3.中国专利号cn107756441a公开的一种一体化的仿人机器人踝关节驱动机构,采用液压驱动单元,驱传动机构布置于小腿内部,足部为仿人设计且具有自复位功能。该系统一体化程度高,但液压驱动单元的采用使得该系统必须依赖液压泵站等基础元件,无法形成一套独立的模块化系统。足部设计虽轻便,但足本体处的弹性结构使得行走中的变形量较大,足部姿态难以进行准确估计和控制。
4.中国专利号cn109606500b公开的一种跑跳双足机器人踝足机构,采用电机和连杆传动,并在足部加入力传感器感知地面信息。该系统具有一定的路面感知能力,结构也较为紧凑,但踝部自由度仅有一个,踝部稳定性控制难度大,电机和长连杆的传动方式使得结构整体性差,电机和连杆仍突出于腿部结构无法形成较好的一体化设计,在添加外壳后由于连杆运动受限,踝部运动范围较小。且该足部结构仍为传统一体式结构,在路面适应和缓冲减震方面效果不佳。
5.中国专利号cn112339881a公开的一种仿人双足机器人及其小腿结构,将二自由度踝部驱动电机置于小腿内部,利用绳索驱动踝关节,实现了一体化紧凑式布局。该系统可以在布局紧凑的条件下实现踝关节控制,但绳索驱动的方式使得踝部的驱动性能较差,整体结构复杂且控制难度大,系统的响应也较为缓慢,且该系统的足部无任何仿生形态设计,在非平整路面上的行走较为困难。
技术实现要素:
6.本发明的目的在于针对现有技术的缺点,提供一种用于改善双足机器人行走稳定性的一体化踝足系统,在与地面接触的足踝处提供路面适应和稳定性控制功能,改善双足
机器人的行走稳定性。本发明通过高度紧凑和一体化设计的踝部驱传动系统,使得系统可以布置于小腿内部,不影响腿部结构的同时,减少驱传动结构件的外露,显著提高了机器人腿足结构的整体性。通过足部仿生学设计,参考人类等双足行走生物的足部结构,利用足前掌弹性趾关节、足后跟缓冲减震机构等,可实现机器人的仿人步态行走,并可有效减小路面冲击。通过安装于足部和腿部的各类传感器,对落脚点地面的不平度和踝足部的姿态实现感知,并反馈至内置于踝足系统的高性能处理模块中,通过算法实现在非平整路面下对踝足系统的自适应性姿态调整。同时,高度一体化的踝足系统使得其可以作为一个带有适应性控制功能的模块,用于各类双足机器人中。
7.本发明的目的是通过以下技术方案来实现的:一种用于改善双足机器人行走稳定性的一体化踝足系统,包括机器人小腿、踝部驱动传动系统、二自由度踝关节、仿生学设计足部;所述踝部驱动传动系统位于小腿内,小腿与二自由度踝关节连接;所述二自由度踝关节的另一端与仿生学设计足部连接;所述仿生学设计足部包括依次连接的足前掌、足本体和足后跟;所述足前掌上设置有被动式弹性关节,所述足后跟上设置有缓冲减震块。
8.进一步地,所述足前掌上设置的被动式弹性关节的设计参数表示为:
[0009][0010]
其中,k为弹性元件的弹性系数,e为弹性元件的弹性模量,d为弹性元件的材料直径,dm为弹性元件的中径,f为前掌关节所能承受的最大载荷,n为弹性元件有效圈数,r为前掌关节所受载荷的力臂,n为弹性元件的数量,为前掌转动角度。
[0011]
进一步地,所述足本体与二自由度踝关节连接。
[0012]
进一步地,所述足后跟的后端设计为曲面,所述足前掌的前端设计为曲面。
[0013]
进一步地,所述足后跟上设置的缓冲减震块的设计参数表示为:
[0014][0015]
其中,σ
p
为后跟缓冲过程所受最大应力,ε为后跟缓冲过程产生的变形量,k为后跟缓冲材料形状系数,e为后跟缓冲材料弹性模量,h0为后跟原始厚度,h为缓冲材料压缩后的后跟厚度。
[0016]
进一步地,所述踝部驱动传动系统包括驱动电机、增速器、滚珠丝杆、传动连杆和直线导轨;所述驱动电机与增速器连接;所述增速器的输出端与滚珠丝杆连接;所述滚珠丝杆的另一端与传动连杆连接;所述直线导轨固定于机器人小腿上,并与传动连杆连接,用于约束传动连杆上端的运动方向;所述传动连杆的末端与足本体连接。
[0017]
进一步地,所述驱动电机优选功率密度大于600w/kg的高功率密度伺服电机。
[0018]
进一步地,所述一体化踝足系统还包括集成于足本体和小腿内的足部感知模块与数据处理模块;所述足部感知模块包括由若干足底压力传感器组成的传感器阵列和倾角传感器;所述数据处理模块用于处理足底压力传感器和倾角传感器采集的信息。
[0019]
进一步地,所述足底压力传感器为柔性薄膜压力传感器。
[0020]
进一步地,所述数据处理模块处理得到足部倾角为:
[0021][0022]
其中,θ
p
为足部前后倾角,fb为足后部压力,lb为足后部压力的力臂,ff为足前部压力,lf为足前部压力的力臂,m为踝足系统的重量,g为重力加速度,lg为踝足系统重心与踝关节处的距离,θr为足部左右倾角,f
l
为足左侧压力,l
l
为足左侧压力的力臂,fr为足右侧压力,lr为足右侧压力的力臂。
[0023]
本发明的有益效果在于:
[0024]
(1)足部分体式结构设计和路面地形感知能力,使得机器人足部具备仿人步态行走功能和路面冲击缓冲功能,为机器人快速稳定行走提供重要支撑。通过足部和腿部内置的传感器,可直接感知路面不平度信息和踝足系统姿态信息,实现踝足系统对地面的自主适应和稳定性控制。
[0025]
(2)踝部的直线驱动方式和高度紧凑的传动系统,使得系统可以布置于小腿内部,不同于传统机器人踝部将电机置于小腿上部,并使用长连杆传动的方式,本方案减少了驱传动结构件的外露,显著提高了机器人腿足结构的整体性。该一体化设计方式使得踝足系统可以作为一个带有适应性控制功能的模块,用于各类双足机器人中。
附图说明
[0026]
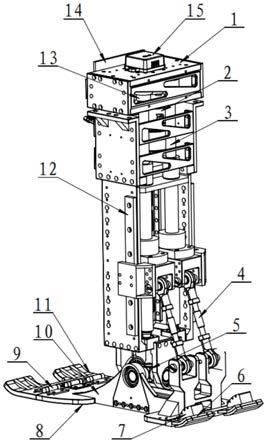
图1是本发明实施例的立体结构示意图;
[0027]
图2是本发明实施例的侧视图;
[0028]
图3是本发明实施例的足部倾角计算示意图;
[0029]
附图标号:1-小腿、2-驱动电机、3-滚珠丝杆、4-传动连杆、5-二自由度踝关节、6-足后跟、7-缓冲减震块、8-足底压力传感器、9-被动弹性关节、10-足本体、11-足前掌、12-直线导轨、13-增速器、14-数据处理模块、15-倾角传感器。
具体实施方式
[0030]
以下结合附图对本发明作进一步说明。
[0031]
本发明的技术构思在于:针对双足机器人踝足部分对感知和稳定性控制的较高需求,和当前基于机器人躯干姿态控制的缺点,提出了一种解决方案,将机器人踝足部分和小腿部分作为一套独立系统进行一体化设计,并利用各类传感器实现系统对地面的自适应。该系统的足部充分利用仿生学设计方法,改进传统双足机器人整体式足部形式,将足部结构分为三部分,使其兼具仿人步态适应性和吸能储能功能,并通过安装于足底的力传感器阵列,使得足部本身具有对路面的感知能力,配合踝足系统内其它传感器,有效改善了传统双足机器人对于踝足部分控制的不足,实现仅依靠踝足部分对非平整路面的自适应控制。该系统踝部的直线驱动方式和高度紧凑的传动系统,使得系统可以布置于小腿内部,改善
了传统机器人踝部外露结构件较多,一体化程度较差的特点,显著提高了机器人腿足结构的整体性。该一体化设计方式使得踝足系统可以作为一个带有适应性控制功能的模块,用于各类双足机器人中。本发明将一体化机器人踝足系统设计和自适应路面感知控制能力集成于同一套系统中,可有效帮助双足机器人进行非平整路面稳定行走,进一步增强其路面适应性和运动能力。
[0032]
参照图1-3,本发明提出了一种用于改善双足机器人行走稳定性的一体化踝足系统,该系统由机器人小腿1及踝部驱动传动系统、二自由度踝关节5、仿生学设计足部、足部感知模块8与数据处理模块14等部分组成。其中,所述踝部驱传动系统为整套一体化踝足系统提供动力以驱动足部运动;所述二自由度踝关节5用于调整足部姿态;所述仿生学设计足部用于支撑机器人本体,实现足部落地的缓冲减震,并可实现机器人的仿人步态行走;所述足部感知模块8与数据处理模块14用于感知采集环境信息和系统本身姿态信息,并通过处理模块14实现对系统的姿态控制。所述踝部驱动传动系统位于机器人小腿1内部,小腿1与二自由度踝关节5连接;所述二自由度踝关节5的另一端与仿生学设计足部连接。
[0033]
另外,所述踝部驱动传动系统设计紧凑且一体化程度高,能充分利用小腿长度,在不影响小腿1骨架结构的同时,使得动力高效顺畅传递至足部,膝关节以下呈一体化构型。所述踝部驱动传动系统包括驱动电机2、增速器13、滚珠丝杆3、传动连杆4和直线导轨12;所述驱动电机2与增速器连接,所述驱动电机优选采用功率密度大于600w/kg且重量轻的高功率密度伺服电机,并通过改变增速器的速比,调整踝部实际输出的最大转速和转矩。所述增速器13的输出端与滚珠丝杆3连接;所述滚珠丝杆3的另一端与传动连杆4连接;所述直线导轨12固定于机器人小腿1上,并与传动连杆4连接,用于约束传动连杆4上端的运动方向;所述传动连杆4的末端与足本体10连接。
[0034]
另外,所述仿生学设计足部为三段式设计,包括依次连接的足前掌11、足本体10和足后跟6。所述足前掌11包括被动式弹性关节9,以灵活运动为主,可实现仿人步态行走。所述足本体10与二自由度踝关节5连接,为一体化踝足系统各部分提供良好支撑。所述足后跟6上设置有缓冲减震块7,可有效缓冲足部受到的路面冲击。
[0035]
所述被动式弹性关节9主要作用为仿人步态行走的抬脚,大步长、爬楼梯行走时的踮脚,以及可能的下蹲辅助等。足前掌11的被动式弹性关节9最大运动角度可由结构设计灵活调整,可通过控制二自由度踝关节5和足部姿态实现足前掌11运动,并通过弹性元件实现足部姿态的复位。根据机器人前掌实际受力和运动情况,前掌弹性关节设计参数可表示为:
[0036][0037]
其中,k为弹性元件的弹性系数,e为弹性元件的弹性模量,d为弹性元件的材料直径,dm为弹性元件的中径,f为前掌关节所能承受的最大载荷,n为弹性元件有效圈数,r为前掌关节所受载荷的力臂,n为弹性元件的数量,为前掌转动角度。
[0038]
在本发明实施例中,若已知e=19600mpa为弹性元件的弹性模量,d=3mm为弹性元件的材料直径,dm=5mm为弹性元件的中径,n=3为弹性元件有效圈数,n=3为弹性元件的数量,r=126mm为前掌关节所受载荷的力臂,为前掌转动角度,则前掌弹性关节9设
计参数为
[0039][0040]
另外,所述足后跟6处设计有缓冲减震块7,主要作用为提供第一触地点,缓冲机器人落地时的大量冲击能量。该机构可在地面冲击力方向上运动,为足后跟6提供缓冲行程,该行程可由结构设计灵活调整。机构通过缓冲减震块7吸收地面冲击能量,并配合足后跟6处的曲面贴合地面实现较好的落地姿态和缓冲效果。足后跟6的缓冲减震块7完全压缩后,足后跟6与足本体10贴合。根据机器人后跟实际受力和运动情况,后跟缓冲机构设计参数可表示为
[0041][0042]
其中,σ
p
为后跟缓冲过程所受最大应力,ε为后跟缓冲过程产生的变形量,k为后跟缓冲材料形状系数,e为后跟缓冲材料弹性模量,h0为后跟原始厚度,h为缓冲材料压缩后的后跟厚度。
[0043]
在本发明实施例中,若已知k=1.3为后跟缓冲材料形状系数,e=7.84mpa为后跟缓冲材料弹性模量,h0=20mm为后跟原始厚度,h=15mm为缓冲材料压缩后的后跟厚度,后跟缓冲机构7设计参数为
[0044][0045]
所述一体化踝足系统还包括集成于足部本体内的足部感知模块8与数据处理模块14,在不影响足部各处功能结构的同时,使得各传感器能够直接采集到路面信息、足部姿态信息等,并缩短数据传递链路,提高系统运行效率。
[0046]
所述足部感知模块包括足底压力传感器8、足底柔性电路、倾角传感器15和倾角数据采集电路。所述足底压力传感器8采用柔性薄膜压力传感器阵列,可将足底压力变化转换为传感器电阻变化,得到路面信息。通过足底柔性电路连接各足底压力传感器和数据处理模块14,将各传感器的电信号作为数据处理模块14的原始输入参数。由于足底压力传感器采用柔性材料制成,在足底受压、受冲击时仍能保持正常传感和通讯。所述机器人腿部1内布置有倾角传感器15,所述倾角传感器15作为姿态感知系统,用于采集一体化踝足系统在各个方向上的倾角。通过倾角数据采集电路连接倾角传感器15和数据处理模块14,将倾角传感器15的电信号作为数据处理模块14的输入。
[0047]
所述数据处理模块14利用传感器信息,得到一体化踝足系统的姿态信息,驱动一体化踝足系统对地面的自适应运动。数据处理模块14在满足小型化,可布置于踝足系统狭小空间内的同时,可作为整套踝足系统的主控站,使得踝足系统成为一套模块化机器人系统。
[0048]
由足底压力传感器根据足底受力情况计算得的足部倾角为:
[0049][0050]
其中,θ
p
为足部前后倾角,fb为足后部压力,lb为足后部压力的力臂,ff为足前部压力,lf为足前部压力的力臂,m为踝足系统的重量,g为重力加速度,lg为踝足系统重心与踝关节处的距离,θr为足部左右倾角,f
l
为足左侧压力,l
l
为足左侧压力的力臂,fr为足右侧压力,lr为足右侧压力的力臂。
[0051]
在本发明实施例中,若已知fb=65n为足后部压力,lb=89mm为足后部压力的力臂,ff=35n为足前部压力,lf=126mm为足前部压力的力臂,m=10kg为踝足系统重量,g=9.8m/s2为重力加速度,lg=283mm为踝足系统重心与踝关节处的距离,f
l
=53n为足左侧压力,l
l
=65mm为足左侧压力的力臂,fr=47n为足右侧压力,lr=65mm为足右侧压力的力臂,通过传感器数据反馈计算得到的足部倾角为
[0052][0053]
上述实施例仅仅是本发明技术构思实现形式的列举,本发明的保护范围不仅限于上述实施例,本发明的保护范围可延伸至本领域技术人员根据本发明的技术构思所能想到的等同技术手段。