1.本发明涉及倾覆管理技术领域,尤其涉及一种无人车倾覆管理装置及其控制方法和无人车。
背景技术:
2.随着无人车技术的发展,在人类难以到达的区域,无人车起着越来越重要的作用,这些区域通常环境复杂、道路边界不明显甚至没有道路,在无人车行驶过程中极易发生侧翻倾覆,致使车辆损坏,造成任务中断。因此在无人车上设置倾覆管理装置,对保护无人车以及确保任务的顺利完成有着重要意义。目前应用在无人车的倾覆保护方法主要有以下三种形式:一是增加防护装置,如增加防护板,对车体的车头和车尾进行保护;二是增加缓冲装置,通过安全气囊2实现倾覆过程中的缓冲保护;三是增加通过调整重心预防倾覆装置。
3.cn 207182093 u所述车体的两侧均固定安装有缓冲装置,所述缓冲装置包括缓冲外壳,所述缓冲外壳的内部开设有容纳腔,且缓冲外壳的一侧开设有凹槽,所述凹槽的内部滑动安装有滑板,所述滑板的一侧与弹簧的一端固定连接,且滑板的另一侧固定安装有缓冲柱,所述弹簧远离滑板的一端与凹槽的槽底固定连接。本实用新型通过设置缓冲装置,从而使车体与其他设备发生碰撞时,减少车体的损坏程度。
4.现有方法主要是集中在倾覆前的预防与倾覆后的保护,并没有小车倾覆后的扶正的有效解决方案,对于野外工作环境下,在没有人的情况下,一旦发生侧翻倾覆,无法让小车回到正常工作状态。目前尚无集倾覆保护与倾覆后让小车回到工作状态于一体的系统解决方案。
技术实现要素:
5.发明目的:本发明的目的是提供一种集倾覆保护与倾覆后小车快速复原功能一体的无人车倾覆管理装置;本发明的另一目的是提供一种无人车倾覆管理装置的控制方法;本发明的另一目的是提供一种具有倾覆管理装置的无人车。
6.技术方案:本发明的无人车倾覆管理装置,所述装置包括多级气囊,设在多级气囊间用于连接气囊的电磁阀与多级气囊连接的高压气泵,速度传感器,电池,与速度传感器、电池、高压气泵和电磁阀组电连的控制器,所述控制器用于控制多级气囊充气和放气;所述控制器内置有用于检测无人车倾斜角度的陀螺仪。
7.进一步地,所述多级气囊包括第一级气囊、第二级气囊和第三级气囊,所述电磁阀组包括一级电磁阀、二级电磁阀和三级电磁阀。
8.进一步地,一级电磁阀、二级电磁阀和三级电磁阀为双向电磁阀。
9.进一步地,一级气囊和高压气泵通过气管连接,气管与一级气囊通过一级电磁阀连接。
10.上述的无人车倾覆管理装置的控制方法,包括以下步骤:
11.(1)陀螺仪监测无人车的倾斜角度,速度传感器检测小车速度;
12.(2)控制器读取倾斜角度和小车速度,判断小车速度是否达到第一预设速度范围;若否,则重复步骤(1),若是,则进行下一步;判断小车倾斜角度是否达到第一预设角度范围;若否,则重复步骤(1),若是,则进行下一步;判断一级电磁阀是否打开;若否,则打开一级气囊,若是,则进行下一步;判断小车速度是否达到第二预设速度范围;若否,则重复步骤(1),若是,则进行下一步;判断小车倾斜角度是否达到第二预设角度范围;若否,则重复步骤(1),若是,则打开小车二级气囊;其中第一预设速度小于第二预设速度,第一预设角度小于第二预设角度。
13.进一步地,步骤(2)中包括:
14.(21)控制器判断小车速度为零,倾斜角度大于第三预设角度范围;
15.(22)间隔一段时间,判断小车速度和倾斜角度是否与步骤(21)中数值相同;若否,则重复上一步,若是,则进行下一步;判断小车倾斜反方向或倾斜方向的一级气囊是否打开;
16.若倾斜反方向的一级气囊未打开,则打开,若打开,则进行下一步;判断小车倾斜反方向的二级气囊是否打开;若否,则进入步骤(23),若是,则收回倾斜反方向的二级气囊;
17.若倾斜方向的一级气囊未打开,则打开倾斜方向的一级气囊,若是,则进行下一步;判断小车倾斜方向的二级气囊是否打开;若否,则打开倾斜方向二级气囊,若是,则进入步骤(23);
18.(23)控制器判断小车倾斜角度是否大于第四预设角度范围,若是,则高压气泵高速充气打开三级气囊,若否,则进行下一步;判断小车倾斜角度是否在第五预设角度范围之间;所是,则高压气泵中速充气打开三级气囊,若否,则电磁阀关闭,高压气泵充气结束;
19.(24)无人车回正,判断小车倾斜角读是否等于零,若否,则回收气囊,若是,则结束;
20.其中第四预设角度>第三预设角度>第五预设角度>第二预设角度。
21.进一步地,步骤(23)中,高压气泵高速为2.3-3.3升/分,中速为1.3-2.3升/分。
22.一种无人车,所述无人车包括上述无人车倾覆管理装置,所述无人车和管理装置通过固定装置连接。
23.本装置的工作原理为:当无人车发生侧倾时,控制器通过陀螺仪提取的小车的速度和倾斜角度信息,通过特定的算法,将小车异常情况分为三级,一级代表小车有可能倾倒,第一级气囊充气打开,可以对小车进行预防性保护;二级代表小车很大概率即将倾倒,第二级气囊充气打开,可以对小车在倾覆过程中的缓冲保护;三级代表小车已经倾倒,第三级气囊充气打开,可以让小车的姿态的进行回正。因此控制模块智能选择打开电磁阀来控制多级气囊的充气程度,既可以保护无人车,又可以在当小车倾倒后,气囊与地面接触后,使小车的姿态进行回正,确保小车在无人的环境下任务能够正常继续。
24.有益效果:与现有技术相比,本发明具有如下显著优点:本发明极大减轻了小车发生意外时的损坏,最大程度地确保小车在无人的环境下工作任务能够顺利完成,实现集倾覆保护与倾覆后让小车回到工作状态于一体的系统解决方案,既能让小车发生倾覆过程中得到保护,又能让小车发生倾覆后能够回到正常的工作状态。
附图说明
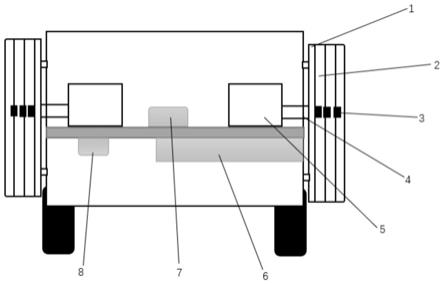
25.图1为本发明一种基于多级气囊的无人车倾覆管理装置的总体图;
26.图2为本发明装置的模块连接图;
27.图3为本发明无人车打开第一级气囊的工作示意图;
28.图4为本发明无人车打开第一、二级气囊的工作示意图;
29.图5为本发明无人车打开第一、二、三级气囊的工作示意图;
30.图6为本发明无人车打开第一、二级气囊的流程图;
31.图7为本发明无人车打开第三级气囊和收回气囊的流程图。
具体实施方式
32.下面结合附图对本发明的技术方案作进一步说明。
33.图中,1、固定装置;2、多级气囊;3、电磁阀组;4、气管;5、高压气泵;6、电池;7、控制模块;8、速度传感器;201、第一级气囊;202、第二级气囊;203、第三级气囊;301、一级电磁阀;302、二级电磁阀;303、三级电磁阀。
34.如图1所示,本发明的无人车倾覆管理装置包括刚性结构的固定装置1和多级气囊2,多级气囊2连接在固定装置1上,固定装置1连接在无人车的两侧,多级气囊2在没有充气前始终呈压缩状。无人车中设置电池6、高压气泵5、速度传感器8和控制模块7,控制模块7与速度传感器8、电池6、高压气泵5连接。固定装置中心设置双向电磁阀组3,其与气管4和多级气囊2相连接,高压气泵5与气管4相连接,多级气囊2分为三级气囊,每级气囊间都通过双向电磁阀组3相连接,电池6与控制模块7连接,给各个模块进行供电。
35.控制模块7内置陀螺仪和单片机,这里选用的是一款水平单轴陀螺转角仪,通过对陀螺仪的角速率进行动态姿态算法,实时输出物体的倾斜角度信息。单片机实时读取速度传感器8和陀螺仪的速度与倾斜角度数据,单片机可选用stm32单片机或arm单片机。通过是否达到响应条件,判断出无人车是否处于异常状态,并选择性的打开电磁阀组3,使多级气囊2呈现出不同的充气程度,由于多级气囊2迅速充气后体积增大进而与地面接触,从而得到了缓冲,减少小车所受的冲击力,保护小车的完好,并且当小车倾倒后,多级气囊2与地面接触部分可以进一步充气,使小车的姿态进行回正,确保无人车的任务能够正常进行。
36.如图2所示,这是基于多级气囊2的无人车倾覆管理装置的模块图,陀螺仪和速度传感器8把信息传输到单片机,然后单片机将信息融合计算,传输相应的指令到高压气泵5和电磁阀组3,当下达充气指令时,高压气泵5与电磁阀组3打开,高压气泵5把气体传输到多级气囊2中,电磁阀组3的打开与关闭控制着多级气囊2的充气大小。
37.控制模块7中的陀螺仪实时监测倾斜角度,速度传感器8实时检测小车速度,单片机实时读取并计算速度信息,判断出无人车是否处于异常状态,将小车异常情况分为三级,一级代表小车有可能倾倒,第一级气囊201充气打开,可以对小车进行预防性保护,如图3所示;二级代表小车很大概率即将倾倒,第二级气囊202充气打开,可以对小车在倾覆过程中的缓冲保护,如图4所示;三级代表小车已经倾倒,第三级气囊203充气打开,可以让小车的姿态的进行回正,如图5所示。因此控制模块7智能选择打开电磁阀组3来控制多级气囊2的充气程度,既可以保护无人车,又可以在当小车倾倒后,多级气囊2与地面接触后,使小车的姿态进行回正,确保小车在无人的环境下任务能够正常继续。
38.无人车倾覆管理装置的控制方法包括以下步骤:
39.(1)陀螺仪监测无人车的倾斜角度,速度传感器检测小车速度;
40.(2)若是达到一级响应条件,一级响应条件为小车速度在第一预设速度范围之间,倾斜角度在第一预设角度范围之间,则判断出小车处于一级异常情况,并且若一级电磁阀301未打开,单片机输出相应的指令通电打开一级电磁阀301和高压气泵5,让小车两侧第一级气囊201充气打开,若一级电磁阀301已打开,则小车两侧的第一级气囊201已经打开对小车进行预防保护。进一步地,在达到一级响应条件并且打开小车两侧第一级气囊201后,单片机继续读取信息判断小车的状态信息,若是达到二级响应条件,二级响应为小车速度为第二预设速度范围之间,倾斜角度为第二预设角度范围之间,单片机输出相应的指令通电打开第二级电磁阀302和高压气泵5,让小车两侧第二级气囊202充气打开,对小车在倾覆过程中的缓冲保护,减轻小车的损怀,保护小车的元件;
41.(21)在小车的速度传感器8检测小车速度为0,陀螺仪检测倾斜角度为第三预设角度范围之间;
42.(22)间隔一段时间,再次检测小车的速度和倾斜角度信息不变,则判断出小车达到三级响应条件,处于三级异常情况。考虑到小车可能处于特殊的环境,如小车的倾斜背侧有石头,因这一侧第二级气囊202与石头抵触,会导致小车无法正常回正,因此需将这一侧第二级气囊202缩小为第一级气囊201。所以在小车倾倒后,需分别判断小车两侧的多级气囊2是否打开,然后进行打开或缩小多级气囊2,多级气囊2的打开可根据电磁阀组3是否通电打开进行判断;
43.若小车倾斜背侧的多级气囊2没有打开,需通电打开一级电磁阀301和高压气泵5,将第一级气囊201打开;若小车倾斜背侧第一级气囊201、第二级气囊202已经打开,则高压气泵5需要抽气把第一级气囊201、第二级气囊202收回,然后再次充气打开第一级气囊201;
44.若小车倾斜方向上的第一级气囊201没有打开,需通电打开一级电磁阀301、二级电磁阀302和高压气泵5,将这一侧的第一级气囊201、第二级气囊202打开;若小车倾斜方向上的第一级气囊201打开且第二级气囊202没有打开,通电打开二级电磁阀302和高压气泵5,将这一侧的第二级气囊202打开;
45.(23)需判断小车此时的倾斜角度,若倾斜角度在第四预设角度范围之间,需通电打开倾斜方向上的三级电磁阀303和高压气泵5,并且高压气泵5需以最大速度充电打开第三级气囊203,若倾斜角度介于第五预设角度之间范围之间,高压气泵5需中速充气打开第三级气囊203,若倾斜角度小于35度后,电磁阀组3关闭,高压气泵5结束充气;
46.(24)小车可以根据惯性和重力继续回正姿态。在判断出倾斜角度信息不变后,则小车处于正常的姿态,高压气泵5需抽气把两侧的多级气囊2收回。
47.其中,第一预设速度小于第二预设速度;第四预设角度>第三预设角度>第五预设角度>第二预设角度>第一预设角度。
48.如图6-7所示,作为一种优选,第一预设速度范围为5-10km/h,第二预设速度范围为>10km/h。作为一种优选,第一预设角度范围为10-25
°
,第二预设角度范围为>25
°
,第三预设角度范围为>45
°
,第四预设角度>85
°
,第五预设角度范围为35
°‑
85
°
。
49.作为一种优选,步骤(23)中,高压气泵的高速为2.3升/分-3.3升/分,中速为1.3升/分-2.3升/分。
50.作为一种优选,电磁阀组3是一种双向电磁阀组3,其原理是在常闭时双向电磁阀组3平时处于关闭状态;当线圈通电之后,电磁阀组3打开,断电后,电磁阀组3关闭。电磁阀组3处于开启状态的时候,进口压力大于出口压力,介质由进口端流向出口端;当出口压力大于进口压力,介质由出口端流向进口端。并且不管介质压力是进口端大于出口端,还是出口端大于进口端,电磁阀组3在断电之后,都能截止介质。双向电磁阀组3与多级气囊2和高压气泵5相连接,当需要打开多级气囊2时,电磁阀组3进口压力大于出口压力,让多级气囊2进行充气;当需要收回多级气囊2时,电磁阀组3出口压力大于进口压力,让多级气囊2中的气体能够被抽出,使得多级气囊2恢复到压缩状。
51.作为一种优选,无人车上包括了设置在其中的高压气泵5,高压气泵5上设置电磁阀组3,高压气泵5是吹吸两用的旋涡气泵。当单片机实时读取并计算速度信息,判断出无人车处于异常状态后,需要打开多级气囊2时,高压气泵5可以充气打开气泵,当小车需要收回多级气囊2时,高压气泵5可以把多级气囊2中的气体抽出。