1.本发明涉及一种转向控制方法及转向控制装置。
背景技术:
2.提案有根据驾驶员的转向操作来控制施加到方向盘的转向反作用力的技术。
3.例如,专利文献1所记载的车辆用转向反作用力控制装置具备:紧急方向盘操作与否判定单元,其判定是否需要用于紧急回避障碍物的紧急方向盘操作(紧急转向操作);转向反作用力降低单元,其在需要紧急方向盘操作时降低转向反作用力。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2009-241725号公报
7.但是,如果在驾驶员进行方向盘的紧急转向操作的情况下单纯地降低转向反作用力,则由于与不需要紧急转向操作的情况下的转向反作用力之间的差,有时会给驾驶员带来不适感。
技术实现要素:
8.本发明的目的在于,在驾驶员进行方向盘的紧急转向操作的情况下,减轻对转向反作用力的不适感,同时,提高方向盘的操作性。
9.在本发明的一方式的转向控制方法中,对方向盘施加将与方向盘的转向角对应的第一转向反作用力和与方向盘的转向角加速度对应的第二转向反作用力相加后的转向反作用力,并判定驾驶员对方向盘进行紧急转向操作的可能性,在判定为存在进行紧急转向操作的可能性的情况下,与未判定为存在进行紧急转向操作的可能性的情况相比,使第二转向反作用力变小。
10.发明效果
11.根据本发明的一方式,在驾驶员进行方向盘的紧急转向操作的情况下,减轻对转向反作用力的不适感,同时,提高方向盘的操作性。
12.本发明的目的和优点通过使用请求范围所示的要素及其组合来具体化并实现。上述的一般的记述和以下的详细的记述这两者仅是例示和说明,应理解为不是如请求范围那样限定本发明。
附图说明
13.图1是搭载有转向控制装置的车辆的转向系统的一例的概略结构图。
14.图2是表示图1的控制器的功能结构例的块图。
15.图3是表示图2的反作用力控制部的功能结构例的块图。
16.图4是第一转向反作用力转矩tr1的一例的说明图。
17.图5a是与实际转轮角对应的小齿轮角和实际转向角的一例的说明图。
18.图5b是图5a的小齿轮角与实际转向角的偏差角速度的说明图。
19.图5c是图5a的小齿轮角与实际转向角的偏差角加速度的说明图。
20.图6a是与虚拟转轮角对应的小齿轮角和实际转向角的一例的说明图。
21.图6b是图6a的小齿轮角与实际转向角的偏差角速度的说明图。
22.图6c是图6a的小齿轮角与实际转向角的偏差角加速度的说明图。
23.图7是第三转向反作用力转矩tr3的一例的说明图。
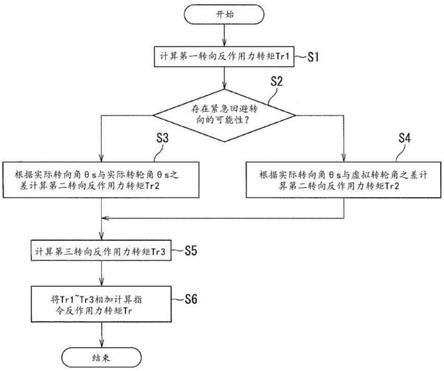
24.图8是实施方式的转向控制方法的一例的流程图。
25.图9是第二转向反作用力转矩tr2的一例的说明图。
具体实施方式
26.以下,参照附图对本发明的实施方式进行说明。
27.(结构)
28.图1是搭载了本实施方式的转向控制装置的车辆(以下记作“本车辆”)的转向系统的一例的概略结构图。
29.如图1所示,本车辆具备:转向部31、转轮部32、备用离合器33。另外,本车辆具备控制器11和外部传感器16。
30.本车辆采用线控转向(sbw)系统,该线控转向系统在备用离合器33成为分离状态时,接受驾驶员的转向输入的转向部31和使作为转向轮的左右前轮34fl、34fr转轮(转向)的转轮部32机械地分离。在以下的说明中,有时将左右前轮34fl、34fr标记为“转向轮34”。
31.转向部31具备:方向盘31a、柱轴31b、电流传感器31c、反作用力促动器12、第一驱动电路13和转向角传感器19。
32.另一方面,转轮部32具备:小齿轮轴32a、转向齿轮32b、齿条32c,转向齿条32d、转轮促动器14、第二驱动电路15,转轮角传感器35。
33.转向部31的方向盘31a通过反作用力促动器12被施加反作用力转矩,并且接受由驾驶员施加的转向转矩的输入而旋转。另外,在本说明书中,有时将由促动器施加给方向盘的反作用力转矩记为“转向反作用力转矩”。
34.柱轴31b与方向盘31a一体地旋转。
35.另一方面,转轮部32的转向齿轮32b与齿条32c啮合,根据小齿轮轴32a的旋转使转向轮34转轮(转向)。作为转向齿轮32b,例如可以采用齿条齿轮式的转向齿轮等。
36.备用离合器33设置在柱轴31b和小齿轮轴32a之间。并且,当备用离合器33处于分离状态时,机械地分离转向部31和转轮部32。当备用离合器33处于接合状态时,机械地连接转向部31和转轮部32。
37.外部传感器16是检测本车辆的周围环境,例如本车辆周围的物体的传感器。外部传感器16例如可以包括摄像机和测距装置。
38.摄像机和测距装置检测存在于本车辆周围的物体(例如,其他车辆、行人、车道边界线或车道划分线等白线、设置在道路上或道路周围的信号机、停止线、标识、建筑物、电线杆、路缘石、人行横道等地上物)、物体相对于本车辆的相对位置、本车辆与物体之间的相对距离等本车辆的周围环境。
39.摄像机可以是例如立体摄像机。摄像机可以是单反摄像机,也可以通过单反摄像
机以多个视点拍摄同一物体,计算到物体的距离。另外,也可以基于根据单反摄像机的拍摄图像检测出的物体的接地位置,计算到物体的距离。
40.例如,测距装置可以是激光测距仪(lrf:laser range-finder)、雷达单元、激光扫描单元。
41.转向角传感器19检测柱轴旋转角,即方向盘的实际转向角θs(方向盘角度)。
42.转轮角传感器35检测转向轮34的转轮角(实际转轮角)θt。
43.控制器11是进行转向轮的转轮控制和方向盘的反作用力控制的电子控制单元(ecu:electronic control unit)。在本说明书中,“反作用力控制”是指通过反作用力促动器12等促动器对方向盘31a施加的转向反作用力转矩的控制。控制器11包括处理器20和存储装置21等周边部件。处理器20例如可以是cpu(central processing unit)或mpu(micro-processing unit)。
44.存储装置21可以具备半导体存储装置、磁存储装置以及光学存储装置。存储装置21可以包括寄存器、高速缓冲存储器、用作主存储装置的rom(read only memory)以及ram(random access memory)等存储器。
45.另外,也可以通过在通用的半导体集成电路中设定的功能逻辑电路来实现控制器11。例如,控制器11也可以具有现场可编程门阵列(fpga:field-programmable gate array)等可编程逻辑器件(pld:programmable logical device)等。
46.图2是表示控制器11的功能结构例的块图。控制器11具备:转轮控制部36、反作用力控制部37、紧急转向判定部38。
47.转轮控制部36、反作用力控制部37以及紧急转向判定部38的功能例如可以通过处理器20执行存储在控制器11的存储装置21中的计算机程序来实现。
48.转轮控制部36根据方向盘31a的实际转向角θs,决定作为转向轮34的转轮角的指令值的指令转轮角。
49.转轮控制部36将计算出的指令转轮角输出到第二驱动电路15,驱动转轮促动器14,以使实际转轮角θt成为指令转轮角。
50.参照图1。转轮促动器14例如可以是无刷电动机等电动机。转轮促动器14的输出轴经由减速器与齿条32c连接。
51.转轮促动器14根据从第二驱动电路15输出的指令电流,向转向齿条32d输出用于使转向轮34转轮的转轮转矩。
52.转轮角传感器35检测转轮促动器14的输出轴的旋转角,并基于检测到的旋转角检测转向轮34的转轮角。
53.第二驱动电路15通过伺服控制,控制向转轮促动器14的指令电流,使得由转轮角传感器35检测出的实际的转轮角与来自转轮控制部36的控制信号所表示的指令转轮角一致。
54.参照图2。紧急转向判定部38判定是否存在驾驶员进行方向盘31a的紧急转向操作的可能性。
55.以下,有时将驾驶员对方向盘31a的紧急转向操作简称为“紧急转向操作”。另外,所谓紧急转向操作,与沿着车道的行驶那样的通常行驶时的转向操作不同,意味着需要车辆的行进方向的急剧变更时那样的急剧的转向操作,其一例是用于回避本车辆周围的障碍
物的紧急转向。
56.例如,紧急转向判定部38基于作为外部传感器16检测出的周围环境的信息的周围环境信息,判定是否存在进行紧急转向操作的可能性。
57.例如,紧急转向判定部38计算相对于本车辆周边的障碍物的风险,在计算出的风险为阈值以上的情况下判定为存在进行紧急转向操作的可能性,在风险小于阈值的情况下不判定为存在进行紧急转向操作的可能性。或者在风险小于阈值的情况下判定为没有进行紧急转向操作的可能性。
58.例如,紧急转向判定部38可以计算相对于障碍物的碰撞富裕时间(ttc:time to collision)作为上述风险。紧急转向判定部38可以在碰撞富裕时间ttc为规定值以下的情况下判定为风险为预先确定的规定的阈值以上。
59.此外,例如,紧急转向判定部38可以计算本车辆首位相对于其他车辆的车间时间(thw:time-headway)作为上述风险。当车间时间thw为预先确定的规定的规定值以下的情况下,紧急转向判定部38可以判定风险为阈值以上。
60.或者,如上所述,根据碰撞富裕时间ttc和车间时间thw来计算碰撞富裕时间ttc或车间时间thw越短而越大的风险,也可以判定计算出的风险为预先确定的规定的阈值以上。
61.进而,也可以检测本车辆行进方向的障碍物的位置,计算障碍物相对于本车辆宽度方向的重叠量或偏移量,在碰撞富裕时间ttc或车间时间thw为预先确定的规定值以下,且重叠量为预先确定的规定值以上或偏移量为预先确定的规定值以下的情况下,判定为风险为阈值以上。
62.紧急转向判定部38输出表示是否存在进行紧急转向操作的可能性的判定结果的紧急转向标识。
63.根据转向角传感器19的实际转向角θs的检测结果、转轮角传感器35的实际转轮角θt的检测结果以及紧急转向标识,反作用力控制部37计算作为向方向盘施加的转向反作用力转矩(向方向盘31a施加的旋转转矩,以下也称为反作用力转矩)的指令值的指令反作用力转矩tr。
64.反作用力控制部37向第一驱动电路13输出使反作用力促动器12产生指令反作用力转矩tr的控制信号,通过驱动反作用力促动器12,向方向盘施加计算出的转向反作用力转矩。
65.参照图1。反作用力促动器12例如可以是电动机。反作用力促动器12具有与柱轴31b同轴配置的输出轴。
66.反作用力促动器12根据从第一驱动电路13输出的指令电流,向柱轴31b输出施加给方向盘31a的转矩。通过施加旋转转矩,使转向盘31a产生转向反作用力转矩。
67.第一驱动电路13通过使根据电流传感器31c检测出的反作用力促动器12的驱动电流推定出的实际的转向反作用力转矩与从反作用力控制部37输出的控制信号所示的指令反作用力转矩tr一致的转矩反馈,控制向反作用力促动器12输出的指令电流。或者,也可以通过使电流传感器31c检测出的反作用力促动器12的驱动电流与相当于指令反作用力转矩tr的驱动电流一致的电流反馈,控制向反作用力促动器12输出的指令电流。
68.反作用力促动器12、第一驱动电路13和控制器11形成转向控制装置。
69.接着,对由反作用力控制部37决定的指令反作用力转矩tr(即转向反作用力转矩)
进行说明。参照图3。
70.反作用力控制部37具备第一转向反作用力转矩计算部40、第二转向反作用力转矩计算部41、第三转向反作用力转矩计算部42、加法器43。
71.第一转向反作用力转矩计算部40计算与实际转向角θs对应的第一转向反作用力转矩tr1。
72.图4表示第一转向反作用力转矩tr1的一例。第一转向反作用力转矩计算部40计算使方向盘31a向中立位置返回的方向的反作用力转矩作为第一转向反作用力转矩tr1。方向盘31a的中立位置与实际转向角θs的偏差越大,第一转向反作用力转矩tr1就越增加。第一转向反作用力转矩计算部40将第一转向反作用力转矩tr1输出到加法器43。
73.参照图3。第二转向反作用力转矩计算部41计算与方向盘31a的实际转向角θs的转向角加速度d2θs/dt2对应的第二转向反作用力转矩tr2。
74.进而,第二转向反作用力转矩计算部41基于紧急转向标识控制第二转向反作用力转矩tr2。在紧急转向判定部38判定为存在进行紧急转向操作的可能性的情况下,与未判定为存在进行紧急转向操作的可能性的情况(或者判定为不存在进行紧急转向操作的可能性的情况)相比,进一步减小第二转向反作用力转矩tr2。
75.在此,与转向角加速度d2θs/dt2对应的第二转向反作用力转矩tr2具有与驾驶员施加在方向盘31a上的力(转向转矩)成比例的转矩成分。
76.因此,通过进一步减小第二转向反作用力转矩tr2,在紧急转向操作时驾驶员为了快速转向而向方向盘31a施加较大的力(转向转矩)时,能够根据该较大的力降低初始产生的转向反作用力。因此,紧急转向操作变得容易,方向盘31a的操作性提高。
77.在图3的实施方式中,第二转向反作用力转矩计算部41具备扭转反作用力计算部44、虚拟转轮角计算部45、模拟扭转反作用力计算部46、切换部47。在图3中,将切换部标记为“sw”。
78.扭转反作用力计算部44计算根据实际转轮角θt相对于实际转向角θs的变化的延迟而增加的扭转反作用力转矩trt。
79.通过将这样的扭转反作用力转矩trt作为转向反作用力的一成分施加在方向盘31a上,能够将转向轮34向路面的接地状态的反馈施加给驾驶员。
80.扭转反作用力计算部44根据实际转向角θs与转向轮34的实际转轮角θt之差,计算扭转反作用力转矩trt。
81.具体而言,扭转反作用力计算部44计算与实际转轮角θt对应的小齿轮角(小齿轮轴32a的旋转角),计算与实际转向角θs和小齿轮角的角度差成比例的扭转反作用力转矩trt。
82.实际转向角θs与小齿轮角的角度差根据施加在方向盘31a上的力(转矩)而变化。因此,方向盘31a的转向角加速度d2θs/dt2越大,扭转反作用力转矩trt成为越大的反作用力转矩。
83.因为扭转反作用力转矩trt根据实际转轮角θt而变化,所以扭转反作用力转矩trt根据从实际转向角θs变化到转向轮34开始移动的无用时间(空耗时间)而变化。
84.此外,当实际转轮角θt的响应延迟(即,实际转向角θs的变化率与实际转轮角θt的变化率之间的差)根据路面负荷的差异而变化时,扭转反作用力转矩trt也相应地变化。
85.对于实际转轮角θt相对于实际转向角θs的变化的响应速度,在控制转向轮34的转轮的第二驱动电路15的伺服控制中设置响应保证,驱动转向轮34,以实现将无用时间和响应延迟抑制在规定的设计值以下的行为模型。
86.在驾驶员比较平缓地操作方向盘31a的期间,实际转轮角θt在第二驱动电路15的伺服控制的响应保证的范围内变化。因此,将无用时间和响应延迟抑制在规定的设计值以下。
87.另一方面,在如紧急转向操作那样进行急剧的转向的情况下,实际转轮角θt不能在伺服控制的响应保证的范围内追随。在这种情况下,从实际转向角θs变化到转向轮34开始动作的无用时间和响应延迟变大。这样,扭转反作用力转矩trt根据行驶场景而变化。
88.图5a表示与实际转轮角θt对应的小齿轮角和实际转向角θs的一例。实线50表示实际转向角θs,实线51表示小齿轮角。
89.图5b及图5c表示图5a的小齿轮角与实际转向角θs的偏差角速度及偏差角加速度。
90.在时刻t0实际转向角θs变化后,在时刻t1小齿轮角开始变化。从该时刻t0到时刻t1的期间成为无用时间。另外,在从时刻t1到时刻t2的期间产生响应延迟。如果进行急剧的转向,则无用时间变长,响应延迟增加。
91.相对于此,由于实际转向角θs与实际转轮角θt之差变大,因此扭转反作用力转矩trt变大。
92.于是,在本实施方式中,代替实际转轮角θt,计算根据实际转向角θs而变化的虚拟转轮角,在存在进行紧急转向操作的可能性的情况下,根据该虚拟转轮角与实际转向角θs之差,计算第二转向反作用力转矩tr2。
93.虚拟转轮角计算部45计算根据实际转向角θs而变化的虚拟转轮角。
94.在存在急剧的转向的情况下,虚拟转轮角计算部45计算虚拟转轮角,使得虚拟转轮角相对于实际转向角θs的变化比实际转轮角θt提前响应。即,在存在急剧的转向的情况下,与从实际转向角θs开始变化后实际转轮角θt开始变化的延迟时间相比,从实际转向角θs开始变化后虚拟转轮角开始变化的延迟时间短。
95.例如,虚拟转轮角计算部45计算虚拟转轮角,使得虚拟转轮角的无用时间和响应延迟满足第二驱动电路15的伺服控制的响应保证(即,为响应保证所保证的无用时间和响应延迟的设计值以下)。
96.模拟扭转反作用力计算部46根据虚拟转轮角与实际转向角θs之差,计算模拟扭转反作用力转矩trp。
97.具体而言,模拟扭转反作用力计算部46计算与对应于虚拟转轮角的小齿轮角和实际转向角θs的角度差成比例的模拟扭转反作用力转矩trp。
98.这样,模拟扭转反作用力计算部46基于虚拟计算出的虚拟转轮角而代替实际转轮角θt来计算模拟扭转反作用力转矩trp。
99.因此,即使有急剧的转向,虚拟转轮角的无用时间和响应延迟也不变化,保持比较小的值(例如,为响应保证的设计值以下的预先确定的值)。由此,在虚拟转轮角上产生的无用时间和响应延迟比在实际转轮角θt上产生的无用时间和响应延迟小,因此,模拟扭转反作用力转矩trp比扭转反作用力转矩trt小。
100.图6a表示对应于虚拟转轮角的小齿轮角和实际转向角θs的一例。实线50表示实际
转向角θs,实线52表示小齿轮角。
101.图6b及图6c表示图6a的小齿轮角与实际转向角θs的偏差角速度及偏差角加速度。
102.与虚拟转轮角对应的小齿轮角被设定得较小,使得从实际转向角θs变化到小齿轮角开始变化的无用时间满足根据响应保证而设计的设计值。
103.另外,在从时刻t0到时刻t3的期间,产生小齿轮角相对于实际转向角θs的响应延迟(即,小齿轮角的变化率相对于实际转向角θs的变化率变小),但其差值被设定得较小,以满足以响应保证设计的设计值。
104.因此,即使有急剧的转向,由于实际转向角θs与虚拟转轮角的差被维持为较小的值,所以模拟扭转反作用力转矩trp比扭转反作用力转矩trt小。
105.参照图3。切换部47在紧急转向判定部38基于紧急转向标识判定为存在进行紧急转向操作的可能性的情况下,将模拟扭转反作用力转矩trp作为第二转向反作用力转矩tr2向加法器43输出。
106.在未判定为存在进行紧急转向操作的可能性的情况(或者判定为不存在进行紧急转向操作的可能性的情况)下,将扭转反作用力转矩trt作为第二转向反作用力转矩tr2向加法器43输出。
107.在其结果是,在存在进行紧急转向操作的可能性的情况下,能够进一步减小第二转向反作用力转矩tr2。
108.第三转向反作用力转矩计算部42计算与实际转向角θs的转向角速度dθs/dt对应的第三转向反作用力转矩tr3。
109.图7表示第三转向反作用力转矩tr3的一例。第三转向反作用力转矩计算部42计算与实际转向角θs变化的方向相反的转向转矩,作为第三转向反作用力转矩tr3。第三转向反作用力转矩tr3随着转向角速度dθs/dt的增大而增大。通过将第三转向反作用力转矩tr3施加于方向盘31a,能够施加与摩擦成分和粘性成分对应的转向反作用力。第三转向反作用力转矩计算部42将第三转向反作用力转矩tr3向加法器43输出。
110.加法器43将第一转向反作用力转矩tr1、第二转向反作用力转矩tr2、第三转向反作用力转矩tr3相加,计算出指令反作用力转矩tr,向第一驱动电路13输出使反作用力促动器12产生指令反作用力转矩tr的控制信号。
111.根据上述结构,在紧急转向判定部38判定为存在进行紧急转向操作的可能性的情况下,与未判定为存在进行紧急转向操作的可能性的情况(或者判定为不存在进行紧急转向操作的可能性的情况)相比,仅第二转向反作用力转矩tr2变小。
112.因此,在紧急转向操作时驾驶员为了快速转向而向方向盘31a施加较大的力时,能够根据该较大的力降低初始产生的转向反作用力。因此,紧急转向操作变得容易,方向盘31a的操作性提高。
113.另一方面,由于残留有基于第一转向反作用力转矩tr1和第三转向反作用力转矩tr3的适度的转向反作用力,因此即使第二转向反作用力转矩tr2变小,也能够减轻相对于转向反作用力的不适感。另外,在本实施方式中,对第一转向反作用力转矩tr1和第二转向反作用力转矩tr2加上与转向角速度dθs/dt对应的第三转向反作用力转矩tr3而作为指令反作用力转矩tr。但是,如上所述,第三转向反作用力转矩tr3是与摩擦成分和粘性成分对应的转向反作用力,是与第一转向反作用力转矩tr1和第二转向反作用力转矩tr2相比非常
小的值。因此,也可以将仅将第一转向反作用力转矩tr1和第二转向反作用力转矩tr2相加后的值作为指令反作用力转矩tr,不一定需要第三转向反作用力转矩tr3。但是,为了施加更优选的转向反作用力,如本实施方式所述,优选对第一转向反作用力转矩tr1和第二转向反作用力转矩tr2加上第三转向反作用力转矩tr3而作为指令反作用力转矩tr。
114.(动作)
115.接着,参照图8说明实施方式的转向控制方法的一例。
116.在步骤s1中,第一转向反作用力转矩计算部40计算与实际转向角θs对应的第一转向反作用力转矩tr1。
117.在步骤s2中,紧急转向判定部38判定是否存在进行紧急转向操作的可能性。在判定为存在进行紧急转向操作的可能性的情况下(步骤s2:n),处理进入步骤s3。
118.在未判定为存在进行紧急转向操作的可能性或判定为不存在进行紧急转向操作的可能性的情况下(步骤s2:y),处理进入步骤s4。
119.在步骤s3中,第二转向反作用力转矩计算部41根据实际转向角θs与实际转轮角θt之差计算第二转向反作用力转矩tt2。之后,处理进入步骤s5。
120.在步骤s4中,第二转向反作用力转矩计算部41根据实际转向角θs与虚拟转轮角之间之差计算第二转向反作用力转矩tt2。之后,处理进入步骤s5。
121.在步骤s5中,第三转向反作用力转矩计算部42计算与实际转向角θs的转向角速度dθs/dt对应的第三转向反作用力转矩tr3。
122.在步骤s6中,加法器43将第一转向反作用力转矩tr1、第二转向反作用力转矩tr2和第三转向反作用力转矩tr3相加,计算指令反作用力转矩tr,将使反作用力促动器12产生指令反作用力转矩tr的控制信号输出到第一驱动电路13。第一驱动电路13根据控制信号驱动反作用力促动器12。
123.(实施方式的效果)
124.(1)反作用力控制部37、第一驱动电路13以及反作用力促动器12对方向盘31a施加将与方向盘31a的实际转向角θs对应的第一转向反作用力tr1和与方向盘31a的转向角加速度d2θs/dt2对应的第二转向反作用力tr2相加后的转向反作用力。
125.紧急转向判定部38判定驾驶员进行方向盘31a的紧急转向操作的可能性。在判定为存在进行紧急转向操作的可能性的情况下,与不判定为存在进行紧急转向操作的可能性的情况相比,反作用力控制部37使第二转向反作用力tr2减小。
126.由此,在紧急转向操作时驾驶员为了快速转向而向方向盘31a施加较大的力时,能够根据该较大的力降低初始产生的转向反作用力。因此,紧急转向操作变得容易,方向盘31a的操作性提高。
127.另一方面,由于残留有基于第一转向反作用力转矩tr1的适度的转向反作用力,因此即使第二转向反作用力转矩tr2变小,也能够减轻相对于转向反作用力的不适感。
128.因此,在驾驶员进行方向盘31a的紧急转向操作的情况下,减轻相对于转向反作用力的不适感,同时,提高方向盘31a的操作性。
129.(2)反作用力控制部37、第一驱动电路13以及反作用力促动器12对方向盘31a施加将与方向盘31a的转向角速度dθs/dt对应的第三转向反作用力tr3、第一转向反作用力tr1、第二转向反作用力tr2相加后的转向反作用力tr。
130.通过施加与转向角速度dθs/dt对应的第三转向反作用力tr3,能够施加与摩擦成分和粘性成分对应的转向反作用力,能够减轻相对于转向反作用力的不适感。
131.(3)紧急转向判定部38在相对于本车辆周边的障碍物的风险为阈值以上的情况下判定为存在进行紧急转向操作的可能性。由此,能够更正确地判定驾驶员进行方向盘31a的紧急转向操作的可能性。
132.(4)紧急转向判定部38在相对障碍物的碰撞富裕时间为规定值以下的情况下,判定为风险为阈值以上。由此,能够更正确地判定驾驶员进行方向盘31a的紧急转向操作的可能性。
133.(5)在未判定为存在进行紧急转向操作的可能性的情况下,扭转反作用力计算部44根据转向轮34的实际转轮角θt与实际转向角θs之差计算第二转向反作用力tr2。在判定为存在进行紧急转向操作的可能性的情况下,虚拟转轮角计算部45根据以相对于转向角的变化比实际转向角提前响应的方式设定的虚拟转轮角与实际转向角θs之差,计算第二转向反作用力tr2。
134.由此,能够将转向轮34向路面的接地状态的反馈作为第二转向反作用力tr2施加给驾驶员,并且在判定为存在进行紧急转向操作的可能性的情况下,减小第二转向反作用力tr2而使紧急转向操作变得容易,能够提高方向盘31a的操作性。
135.(变形例)
136.(1)在上述实施方式中,在判定为存在进行紧急转向操作的可能性的情况下,第二转向反作用力转矩计算部41计算模拟扭转反作用力转矩trp作为第二转向反作用力转矩tr2。另外,在未判定为存在进行紧急转向操作的可能性的情况(或者判定为不存在进行紧急转向操作的可能性的情况)下,计算扭转反作用力转矩trt作为第二转向反作用力转矩tr2。
137.但是,本发明并不限定于此,也可以通过各种方法计算出第二转向反作用力转矩tr2。
138.例如,第二转向反作用力转矩计算部41可以计算具有图9所示的特性的第二转向反作用力转矩tr2。第二转向反作用力转矩tr2随着方向盘31a的转向角加速度d2θs/dt2的增大而增大。
139.在判定为存在进行紧急转向操作的可能性的情况下,第二转向反作用力转矩计算部41也可以将第二转向反作用力转矩tr2设定为0。由此,能够使与施加于方向盘31a的力(转矩)成比例的反作用力转矩成分为0,方向盘31a的操作性进一步提高。
140.另外,在判定为存在进行紧急转向操作的可能性的情况下,第二转向反作用力转矩计算部41也可以通过减小图9所示的特性线的倾斜或者设置上限值来减小第二转向反作用力转矩tr2。
141.(2)在上述实施方式中,对采用接受驾驶员的转向输入的转向部31和使作为转向轮的左右前轮34fl、34fr转轮的转轮部32机械地分离的线控转向(sbw)系统的情况进行了说明。但是,本发明不限于此,也可以适用于采用电动动力转向装置的情况。
142.在此记载的全部的例子及条件的用语以教育目的意图,从而有助于读者理解为了本发明和技术的进展而由发明人给予的概念。并应理解为,并不限定于与具体记载的上述例子和条件以及表示本发明的优越性和劣等性相关的本说明书中的例子的构成。虽然对本
发明的实施例进行了详细说明,但应当理解,在不脱离本发明的精神和范围的情况下,可以对其进行各种变更、替换和修改。
143.符号说明
144.11:控制器、12:反作用力促动器、13:第一驱动电路、14:转轮促动器、15:第二驱动电路、16:外部传感器、19:转向角传感器、20:处理器、21:存储装置、31:转向部、31a:方向盘、31b:柱轴、31c:电流传感器、32:转轮部、32a:小齿轮轴、32b:转向齿轮、32c:齿条、32d:转向齿条、33:备用离合器、34:转向轮、34fl:左前轮、34fr:右前轮、35:转轮角传感器、36:转轮控制部、37:反作用力控制部、38:紧急转向判定部、40:第一转向反作用力转矩计算部、41:第二转向反作用力转矩计算部、42:第三转向反作用力转矩计算部、43:加法器、44:反作用力计算部、45:虚拟转轮角计算部、46:反作用力计算部、47:切换部