1.本实用新型涉及罐体无损检测辅助设备技术领域,尤其涉及一种用于移动罐体的地拖装置。
背景技术:
2.对罐体进行无损检测时,一般先将罐体吊装至地拖装置之上,继而通过地拖装置将罐体移动至检测区并关闭检测区的铅门,随后开展检测工作。为了避免电缆线缠绕,地拖装置上通常会设置卷线盘,随着地拖装置移动,手动转动卷线盘对电缆线进行收放。但是,在地拖装置移动过程中,手动转动卷线盘不易操作,增加了人力成本,而且地拖装置移动过程中进行上述操作,也存在极大安全隐患。
技术实现要素:
3.本实用新型的目的在于针对已有的技术现状,提供一种用于移动罐体的地拖装置,可以自动收放电缆线,无需人工转动卷线盘,降低了人力成本,安全性更高。
4.为达到上述目的,本实用新型采用如下技术方案:
5.一种用于移动罐体的地拖装置,包括地拖导轨、地拖车、配电柜和电缆线;
6.所述地拖导轨固定在地面上,地拖车滑动设置在地拖导轨上;
7.所述地拖车上设有卷线盘、转动电机以及自驱机构、支撑机构和翻转机构,卷线盘转动设置在地拖车上且其位于地拖导轨一侧,转动电机的输出轴与卷线盘的转轴连接,进而驱动卷线盘旋转,自驱机构用于驱动地拖车在地拖导轨上移动,支撑机构用于支撑罐体,翻转机构用于驱动支撑机构上的罐体转动;
8.所述配电柜固定在地面上且其与卷线盘位于地拖导轨同侧;
9.所述电缆线卷绕设置在卷线盘上且其一端与配电柜连接、另一端与地拖车上所设转动电机、自驱机构和翻转机构均连接;
10.所述地拖车上还设有位移传感器,位移传感器与转动电机的控制器电性连接,在地拖车沿地拖导轨移动过程中,通过位移传感器检测地拖车的移动距离及方向,转动电机根据位移传感器检测到的信息驱动卷线盘旋转,从而自动收放电缆线。
11.进一步的,还包括线缆支撑架以及若干支撑座,线缆支撑架通过支撑座水平固定在地面上且其与卷线盘位于地拖导轨同侧并位于卷线盘运动轨迹的正下方,卷线盘与配电柜之间的电缆线搁置在线缆支撑架之中。
12.进一步的,所述线缆支撑架为u型结构,利于限制电缆线的位置。
13.进一步的,所述线缆支撑架为l型结构,利于对线缆支撑架进行清洁。
14.进一步的,所述线缆支撑架的内底面设有刷毛垫层,电缆线搁置在线缆支撑架之中时,将与刷毛垫层接触而减少磨损。
15.进一步的,所述电缆线上均匀间隔设有若干采用磁性金属制造的限位套,所述线缆支撑架底面通过胶盒设有若干段磁块,电缆线搁置在线缆支撑架之中时,磁块将吸引限
位套,使电缆线完全搁置在线缆支撑架之中。
16.本实用新型的有益效果为:
17.相比于现有技术,其用于移动罐体的地拖装置在地拖车沿地拖导轨移动过程中,通过位移传感器检测地拖车的移动距离及方向,转动电机根据位移传感器检测到的信息驱动卷线盘旋转,从而自动收放电缆线,无需人工转动卷线盘,降低了人力成本,安全性更高。
附图说明
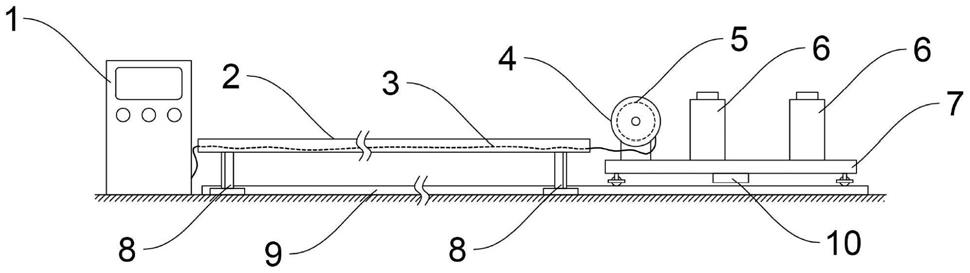
18.图1为本实用新型地拖装置的结构示意图;
19.图2为本实用新型线缆支撑架的结构示意图(u型结构);
20.图3为本实用新型线缆支撑架的结构示意图(l型结构);
21.图4为本实用新型电缆线的结构示意图。
22.标注说明:1、配电柜,2、线缆支撑架,3、电缆线,4、卷线盘,5、转动电机,6、支撑机构,7、地拖车,8、支撑座,9、地拖导轨,10、位移传感器,11、刷毛垫层,12、胶盒,13、磁块,14、限位套。
具体实施方式
23.下面结合附图对本实用新型作进一步说明。
24.请参阅图1所示,一种用于移动罐体的地拖装置,包括地拖导轨9、地拖车7、配电柜1和电缆线3。
25.所述地拖导轨9固定在地面上,由厂房的非检测区延伸至检测区,地拖车7滑动设置在地拖导轨9上。
26.所述地拖车7上设有卷线盘4、转动电机5,卷线盘4转动设置在地拖车7上且其位于地拖导轨9一侧,转动电机5的输出轴与卷线盘4的转轴连接,进而驱动卷线盘4旋转。
27.必要的是,地拖车7上设有自驱机构(图中未示出)、支撑机构6和翻转机构(图中未示出),自驱机构用于驱动地拖车7在地拖导轨9上移动,支撑机构6用于支撑罐体,翻转机构用于驱动支撑机构6上的罐体转动。
28.所述配电柜1固定在地面上且其与卷线盘4位于地拖导轨9同侧,配电柜1与厂房的用电线路连接,从而为地拖车7供电。
29.所述电缆线3卷绕设置在卷线盘4上且其一端与配电柜1连接、另一端与地拖车7上所设转动电机5、自驱机构和翻转机构均连接。
30.所述地拖车7上还设有位移传感器10,位移传感器10与转动电机5的控制器电性连接,在地拖车7沿地拖导轨9移动过程中,通过位移传感器10检测地拖车7的移动距离及方向,转动电机5根据位移传感器10检测到的信息驱动卷线盘4旋转,从而自动收放电缆线3。
31.请参阅图1-4所示,在地拖车7移动过程中,为了避免电缆线3频繁在地面上被拖拽,使其保持清洁和减少磨损,上述技术方案中,还包括线缆支撑架2以及若干支撑座8,线缆支撑架2通过支撑座8水平固定在地面上且其与卷线盘4位于地拖导轨9同侧并位于卷线盘4运动轨迹的正下方,卷线盘4与配电柜1之间的电缆线3搁置在线缆支撑架2之中。具体的,卷线盘4将从线缆支撑架2上收起电缆线3或将电缆线3放落在线缆支撑架2上。
32.作为其中一个实施例,如图2,所述线缆支撑架2为u型结构,利于限制电缆线3的位
置。作为另一个实施例,如图3,所述线缆支撑架2为l型结构,利于对线缆支撑架2进行清洁。
33.优选的是,所述线缆支撑架2的内底面设有刷毛垫层11,电缆线3搁置在线缆支撑架2之中时,将与刷毛垫层11接触而减少磨损。
34.优选的是,所述电缆线3上均匀间隔设有若干采用磁性金属制造的限位套14,所述线缆支撑架2底面通过胶盒12设有若干段磁块13,电缆线3搁置在线缆支撑架2之中时,磁块13将吸引限位套14,使电缆线3完全搁置在线缆支撑架2之中。
35.本实用新型在地拖车7沿地拖导轨9移动过程中,通过位移传感器10检测地拖车7的移动距离及方向,转动电机5根据位移传感器10检测到的信息驱动卷线盘4旋转,从而自动收放电缆线3,无需人工转动卷线盘4,降低了人力成本,安全性更高。同时,增设线缆支撑架2之后,电缆线3不会在地面上被拖拽,降低了维保成本。
36.当然,以上仅为本实用新型较佳实施方式,并非以此限定本实用新型的使用范围,故,凡是在本实用新型原理上做等效改变均应包含在本实用新型的保护范围内。
技术特征:
1.一种用于移动罐体的地拖装置,包括地拖导轨、地拖车、配电柜和电缆线,其特征在于:所述地拖导轨固定在地面上,地拖车滑动设置在地拖导轨上;所述地拖车上设有卷线盘、转动电机以及自驱机构、支撑机构和翻转机构,卷线盘转动设置在地拖车上且其位于地拖导轨一侧,转动电机的输出轴与卷线盘的转轴连接,进而驱动卷线盘旋转,自驱机构用于驱动地拖车在地拖导轨上移动,支撑机构用于支撑罐体,翻转机构用于驱动支撑机构上的罐体转动;所述配电柜固定在地面上且其与卷线盘位于地拖导轨同侧;所述电缆线卷绕设置在卷线盘上且其一端与配电柜连接、另一端与地拖车上所设转动电机、自驱机构和翻转机构均连接;所述地拖车上还设有位移传感器,位移传感器与转动电机的控制器电性连接,在地拖车沿地拖导轨移动过程中,通过位移传感器检测地拖车的移动距离及方向,转动电机根据位移传感器检测到的信息驱动卷线盘旋转,从而自动收放电缆线。2.根据权利要求1所述的一种用于移动罐体的地拖装置,其特征在于:还包括线缆支撑架以及若干支撑座,线缆支撑架通过支撑座水平固定在地面上且其与卷线盘位于地拖导轨同侧并位于卷线盘运动轨迹的正下方,卷线盘与配电柜之间的电缆线搁置在线缆支撑架之中。3.根据权利要求2所述的一种用于移动罐体的地拖装置,其特征在于:所述线缆支撑架为u型结构,利于限制电缆线的位置。4.根据权利要求2所述的一种用于移动罐体的地拖装置,其特征在于:所述线缆支撑架为l型结构,利于对线缆支撑架进行清洁。5.根据权利要求3或4所述的一种用于移动罐体的地拖装置,其特征在于:所述线缆支撑架的内底面设有刷毛垫层,电缆线搁置在线缆支撑架之中时,将与刷毛垫层接触而减少磨损。6.根据权利要求5所述的一种用于移动罐体的地拖装置,其特征在于:所述电缆线上均匀间隔设有若干采用磁性金属制造的限位套,所述线缆支撑架底面通过胶盒设有若干段磁块,电缆线搁置在线缆支撑架之中时,磁块将吸引限位套,使电缆线完全搁置在线缆支撑架之中。
技术总结
本实用新型公开一种用于移动罐体的地拖装置,包括地拖导轨、地拖车、配电柜和电缆线;地拖导轨固定在地面上,地拖车滑动设置在地拖导轨上;地拖车上设有卷线盘、转动电机以及自驱机构、支撑机构和翻转机构,卷线盘转动设置在地拖车上且其位于地拖导轨一侧,转动电机的输出轴与卷线盘的转轴连接,进而驱动卷线盘旋转;配电柜固定在地面上且其与卷线盘位于地拖导轨同侧;电缆线卷绕设置在卷线盘上且其一端与配电柜连接、另一端与地拖车上所设转动电机、自驱机构和翻转机构均连接;地拖车上还设有位移传感器,位移传感器与转动电机的控制器电性连接。该地拖装置可以自动收放电缆线,无需人工转动卷线盘,降低了人力成本,安全性更高。高。高。
技术研发人员:刘宁 尤轩 黄建宜 彭丹柳 杨海东
受保护的技术使用者:宜昌华兴化工装备检测有限公司
技术研发日:2021.08.16
技术公布日:2022/2/15