1.本发明涉及继电器控制领域,涉及一种山地果园自走式电动单轨运输装备及控制方法。
背景技术:
2.众所周知,目前山地果园农资运送及喷雾植保等大多依靠人工作业,生产效率低,劳动强度大,生产安全难以保障。以轨道运输机为代表的无人运送装备能够适应复杂地形环境,具有结构简单、爬坡能力强、安全易用等特点,适合丘陵山地果园的生产作业。
3.但是传统的山地果园单轨运输装备大多采用柴油机或汽油机作为动力,采用电动机控制的系统也多为复杂的硬件控制系统,此类山地果园单轨运输装备控制复杂、可靠性得不到保障。因此,设计一种基于继电器控制,简单易于推广使用的一种山地果园自走式电动单轨运输装备控制电路及其控制方法,是本技术领域人员亟需解决的问题。
技术实现要素:
4.有鉴于此,本发明提供了一种山地果园自走式电动单轨运输装备及控制方法。
5.为了实现上述目的,本发明采用如下技术方案:
6.一种山地果园自走式电动单轨运输装备,包括机头结构、机身结构、连接结构和轨道结构和控制系统,所述机头结构通过所述连接结构与机身结构连接,所述机头结构和机身结构与轨道结构连接;所述控制系统与机头结构和机身结构连接;所述控制系统包括供电系统和主控制系统,所述供电系统用于向主控制系统供电;所述主控制系统包括电机控制电路、软启停电路、坡道检测电路和延时制动电路,所述电机控制电路用于控制电机正反转和启停,所述软启停电路用于避免电机在启动和停止瞬间对电机及单轨运输装备的冲击损伤,所述延时制动电路用于停车时提供一个制动时间可调的制动功能,所述坡道检测电路,用于通过传感器对上下坡检测,同时控制延时制动电路,防止上下坡停车出现溜车问题。
7.进一步的,所述轨道结构包括,运行轨道、螺纹连接杆、轨道齿条、轨道支撑柱和固定底座,所述运行轨道与所述轨道支持柱通过螺纹连接杆固定连接,所述轨道支撑柱通过固定底座与地面固定,所述轨道齿条设置于运行轨道的背面。
8.进一步的,所述机头结构包括控制面板、限速器、失电刹车制动器和通电刹车制动器,所述控制面板与所述限速器设置于轨道结构平面之上,所述失电刹车制动器和通电刹车制动器,设置于轨道结构平面之下。
9.进一步的,所述机身结构包括电池箱、车架和承重机构,所述电池箱一侧与车架连接,另一侧通过连接结构与机头结构连接;所述车架底部通过承重机构与轨道结构滑动连接。
10.进一步的,所述供电系统包括锂电池组、空气开关、过压欠压延时保护器、中间继电器、第一电源模块和第二电源模块,所述锂电池组、空气开关、过压欠压延时保护器和中
间继电器依次连接,所述中间继电器与第一电源模块和第二电源模块连接。
11.进一步的,所述主控制系统还包括,三级联动控制电路和防冲卡保护电路;所述三级联动控制电路和防冲卡保护电路均与电机控制电路连接,所述三级联动控制电路与软启停电路连接,所述三级联动控制电路用于提供手控模式、远程遥控模式和lora无线通信控制三种模式下的系统控制,所述防冲卡保护电路用于防止山地果园自走式电动单轨运输装备在非闭合环形轨道内运行冲出轨。
12.进一步的,所述主控制系统还包括防飞车保护电路,所述防飞车保护电路与电机控制电路连接,所述第二电源模块为防飞车保护电路供电。
13.进一步的,所述主控制系统中包括通用继电器,所述通用继电器线圈正极端口和线圈负极端口之间并联有保护二极管。
14.一种山地果园自走式电动单轨运输装备控制方法,步骤包括,
15.s1:空气开关闭合,供电系统进行供电,等待启动;
16.s2:启动指令发出后,接通软启停电路和延时制动电路;
17.s3:启动电动机,等待停止指令;
18.s4:停止指令发出后,接通坡道检测电路;
19.s5:检测到上下坡路段,则延时制动电路控制刹车抱死,未检测到上下坡路段,则延时制动电路控制延时刹车;
20.s6:延时制动电路控制动作结束后,电动机停止。
21.进一步的,启动电动机后触发防冲卡行程开关,切断电动机控制器启动状态,锁定电动机控制器停车状态,延时制动电路控制刹车抱死,电动机停止,等待按下反向启动按钮,解锁电动机控制器停车状态,重新启动电动机。
22.本发明所取得的有益效果:
23.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种山地果园自走式电动单轨运输装备及控制方法。采用定制锂电池组能够较好地满足无电网覆盖山地果园运输的实际应用需求;通过空气开关、自恢复过压欠压延时保护器和中间继电器硬件实现电路的短路保护,发生短路时通过硬件的电气特性来快速切断系统供电,实现对电路的短路保护,克服了现有技术中通过软件识别短路故障导致的短路保护时间延迟,存在安全隐患的缺陷;采用延时制动电路设计,解决了传统单轨运输装备平路停车急停带来的惯性冲击对货物伤害,实现了平路缓停车功能,减少了对一些运送要求较高的软体货物运输的损伤,增加了山地果园单轨运输装备运送种类范围;采用坡道检测电路设计,设计一种兼容平路缓停车和上下坡急停防溜车传感器检测电路,解决平路停车急停的问题和上下坡停车存在的溜车的问题;采用防飞车保护电路设计,解决了山地果园自走式电动单轨运输装备存在飞车问题,提高了山地果园自走式电动单轨运输装备的安全性;采用软启停电路设计,有效地避免电机在启动和停止瞬间对电机及单轨运输装备及货物的冲击损伤;采用防冲卡保护电路设计,防止山地果园自走式电动单轨运输装备在非闭合环形轨道内运行冲出轨的情况发生,提升系统的山地果园自走式电动单轨运输装备的工作安全性;此外,本发明采用三级联动控制电路,为用户提供了多种控制方式,使用灵活方便、维护调试简单,提升了用户体验的同时也降低系统的成本。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
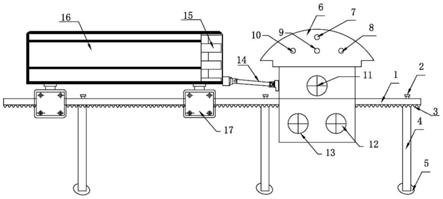
25.图1附图为本发明一种山地果园自走式电动单轨运输装备结构示意图;
26.图2附图为本发明一种山地果园自走式电动单轨运输装备控制系统示意图;
27.图3附图为本发明一种山地果园自走式电动单轨运输装备控制系统电路图;;
28.图4附图为本发明一种山地果园自走式电动单轨运输装备控制方法流程图;
29.图5附图为本发明山地果园自走式电动单轨运输装备控制方法中防冲卡保护电路控制流程图。
30.其中,1、运行轨道;2、螺纹连接杆;3、轨道齿条;4、轨道支撑柱;5、固定底座;6、控制面板;7、锂电池组电压指示灯;8、右启动按钮;9、停止按钮;10、左启动按钮;11、限速器;12、失电刹车制动器;13、通电刹车制动器;14、连接结构;15、电池箱;16、车架;17、承重机构;100为供电系统;200为主控制系统。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.本发明实施例公开了一种山地果园自走式电动单轨运输装备及控制方法,具体包括以下内容:
33.请参阅图1图2,一种山地果园自走式电动单轨运输装备,包括机头结构、机身结构、连接结构14和轨道结构和控制系统,机头结构通过连接结构14与机身结构连接,机头结构和机身结构与轨道结构连接;控制系统均与机头结构和机身结构电连接;控制系统包括供电系统100和主控制系统200,供电系统100用于向主控制系统200供电;主控制系统200包括电机控制电路、软启停电路、坡道检测电路和延时制动电路,电机控制电路用于控制电机正反转和启停,软启停电路用于避免电机在启动和停止瞬间对电机及单轨运输装备的冲击损伤,延时制动电路用于停车时提供一个制动时间可调的制动功能,坡道检测电路,用于通过传感器对上下坡检测,同时控制延时制动电路,防止上下坡停车出现溜车问题。
34.为了进一步实施上述技术方案,机头结构包括控制面板6、限速器11、失电刹车制动器12和通电刹车制动器13,控制面板6与限速器11设置于轨道结构平面之上,失电刹车制动器12和通电刹车制动器13,设置于轨道结构平面之下。
35.其中,限速器11用于限制单轨运输装备出现飞车的实际转速,失电刹车制动器12用于系统停止制动和驻车,通电刹车制动器13用于控制单轨运输装备实际输出转速,连接机构14用于机头结构和机身结构的连接,完成动力牵引传送。
36.此外,控制面板6上包括锂电池组电压指示灯7、右启动按钮8、停止按钮9、左启动按钮10,锂电池组电压指示灯7用于显示电池组状态,左启动按钮10和右启动按钮8用于启
动单轨运输装备行走,停止按钮9用于关闭系统运行状态。
37.为了进一步实施上述技术方案,轨道结构包括,运行轨道1、螺纹连接杆2、轨道齿条3、轨道支撑柱4和固定底座5,运行轨道1与轨道支持柱4通过螺纹连接杆2固定连接,轨道支撑柱4通过固定底座5与地面固定,轨道齿条3设置于运行轨道1的背面。运行轨道1用于搭载支撑山地果园自走式电动单车单轨运输装备机头结构,螺纹连接杆2用于固定运行轨道,轨道支撑柱4用于固定支撑运行轨道1。
38.为了进一步实施上述技术方案,机身结构包括电池箱15、车架16和承重机构17,电池箱15一侧与车架16连接,另一侧通过连接结构14与机头结构连接;车架16底部通过承重机构17与轨道结构滑动连接。
39.其中,电池箱15用于安装固定锂电池组,车架16用于装载货物,承重机构17用于固定车架16和安装车架从动轮。
40.为了进一步实施上述技术方案,供电系统100包括锂电池组、空气开关、过压欠压延时保护器、中间继电器、第一电源模块和第二电源模块,锂电池组、空气开关、过压欠压延时保护器和中间继电器依次连接,中间继电器与第一电源模块和第二电源模块连接。
41.为了进一步实施上述技术方案,主控制系统200还包括防飞车保护电路,防飞车保护电路与电机控制电路连接,第二电源模块为防飞车保护电路供电。
42.其中,锂电池组提供额定输出电压为48v的直流电,第一电源模块为固定输出的大功率直流转换电源模块用于为主控制系统中除防飞车保护电路外的其他用电模块提供24v的直流电,第二电源模块为输出电压可调的控制电源模块单独用于为防飞车保护电路供电。
43.为了进一步实施上述技术方案,主控制系统200还包括,三级联动控制电路和防冲卡保护电路;三级联动控制电路和防冲卡保护电路均与电机控制电路连接,三级联动控制电路与软启停电路连接,三级联动控制电路用于提供手控模式、远程遥控模式和lora无线通信控制三种模式下的系统控制,防冲卡保护电路用于防止山地果园自走式电动单轨运输装备在非闭合环形轨道内运行冲出轨。
44.下面将进一步对上述各用电模块进行说明,请参阅图3,本发明提供的山地果园自走式电动单车单轨运输装备控制系统中,包括dc48v锂电池电源;空气开关qf1;自恢复过压欠压延时保护器uk1;中间继电器ka1;直流稳压电源模块;通用继电器k1~k17;时间继电器kt1;电机驱动器接线端口;失电刹车制动器;通电刹车制动器;离心开关器;水银开关sw1、sw2;行程开关sq1~s4;联动按钮开关sa1~sa3和sb1~sb3;点动按钮开关sb4~sb9;保护二极管d1~d17以及启动电容c1和限流电阻r1。
45.1.供电系统
46.供电系统100包括dc48v锂电池电源、空气开关qf1、自恢复过压欠压延时保护器uk1、中间继电器ka1、直流稳压电源模块,通过空气开关、自恢复过压欠压延时保护器和中间继电器硬件实现电路的短路保护,发生短路时通过硬件的电气特性来快速切断系统供电,实现对电路的短路保护,同时当系统过压或欠压时能够迅速切断电源电路,有效地保护锂电池组和系统。
47.2.电机控制电路
48.电机控制电路用于控制电机正反转和启停,包括电机驱动器、按钮开关和正、反转
继电器。其中,启动电机反转控制电路包括常开点动按钮开关sb4、sb5、sb6,行程开关sq1、sq2,通用继电器k8、k9,保护二极管d8、d9以及电机驱动器反转端口;启动电机正转控制电路包括常开点动按钮开关sb7、sb8、sb9,行程开关sq3、sq4,通用继电器k11、k12,保护二极管d11、d12以及电机驱动器正转端口;电动机的停止是通过按下联动停止按钮开关sb1~sb3其中的一个按钮,同步接通联动按钮开关sa1~sa3中对应的一组接通延时制动电路。
49.3.延时制动电路
50.延时制动电路用于山地果园自走式电动单轨运输装备停车时提供一个制动时间可调的制动功能,包括联动常开按钮开关sa1~sa3,失电刹车制动器,刹车控制通用继电器k2~k6,时间继电器kt1和保护二极管d2~d6。其中,常开联动按钮开关sa1~sa3和常闭联动按钮开关sb1~sb3为三组对应的联动开关,其特征在于:按下联动常闭按钮开关sb1~sb3其中的一个按钮的同时,同步接通联动常开按钮开关sa1~sa3中对应的一组开关;时间继电器kt1可以根据用户实际需求设定停车后刹车制动的延迟时间,设置的延迟时间范围为0~10s;刹车控制通用继电器k6提供外接接线用于连接坡道检测电路,延时制动电路通过刹车控制通用继电器k6受控于坡道检测电路控制,当坡道检测电路检测到电动单轨运输装备处于上下坡路段停车时,系统将通过刹车控制通用继电器k6切断延时制动电路,防止由于延时制动电路制动延迟导致上下坡停车存在溜车的问题。
51.4.坡道检测电路
52.坡道检测电路用于山地果园自走式电动单轨运输装备上下坡检测,同时控制延时制动电路制,防止上下坡停车出现溜车问题,包括水银开关sw1、sw2,坡度检测通用继电器k13~k16和保护二极管d13~d16。其中,坡道检测电路实体为一块单独设计的独立传感线路板,为了方便理解去掉了中间的连接端口,直接与主控系统电路图画在一起,坡道检测电路采用两个角度可调的水银开关sw1和sw2并排放置形成一个双向的角度开关,在水平状态下两个水银开关为常开状态,当检测到坡度大于设定的角度时,其中一个水银传感器会接通为常闭状态,完成对坡度和平路的识别区分,进而在按下停车按钮动作发出时同步识别整车所处的坡道上还是平路上执行相应的处理,为了提高识别的准确性,在山地果园自走式电动单轨运输装备车头和车架上均安装有道检测电路。
53.5.防飞车保护电路
54.防飞车保护电路用于解决山地果园自走式电动单轨运输装备在满载上下坡时容易出现飞车的问题,包括通电刹车制动器k1、离心开关器、保护二极管d1、限速器以及电机驱动器60%限速端口,防飞车保护电路在系统电源开启,使能电机驱动器电机进行启动后,当电动机输出轴转速大于900r/min时,限速器由于离心力的作用甩开进入工作模式开启初级限速,如果电动机输出轴转速持续大于900r/min则离心开关将甩开接通继电器控制电路,启动通电刹车继电器进行二级制动防止转速进一步的提高,同时接通电机驱动器60%转速输出端,将电机输出转速从100%转速输出降低为60%转速输出实现第三级限速,有效地避免了飞车事故的发生。
55.6.软启停电路
56.软启停电路用于避免电机在启动和停止瞬间对电机及单轨运输装备的冲击损伤,提升用户体验,包括:启动电容c1、限流电阻r1、软启停通用继电器k17和保护二极管d17,根据电机驱动器的控制特性,调速信号输入:0
‑
5v,电机驱动器调速信号线com端接通到5v,电
机以最高速运行;电机驱动器调速信号线com端接通到gnd,电机停止运行,为了避免调速信号线调压过快出现的启停冲击,启动电容c1采用带极性的陶瓷电容,调速信号端在接通和断开瞬间,根据通电电容两边电压不能突变和电容充放电的特性可以使得调速电压缓慢上升和下降达到避免电机在启动和停止瞬间对电机及单轨运输装备的冲击损伤的效果。
57.7.防冲卡保护电路
58.防冲卡保护电路用于防止山地果园自走式电动单轨运输装备在非闭合环形轨道内运行冲出轨的情况发生,包括反转加锁行程开关sq2,反转解锁行程开关sq1,反转防冲卡保护通用继电器k9,正转加锁行程开关sq4,正转解锁行程开关sq3,正转防冲卡保护通用继电器k12,保护二极管d9、d12。
59.8.三级联动控制电路
60.三级联动控制电路用于提供手控模式、远程遥控模式和lora无线通信控制三种模式下的系统控制,包括手控联动按钮开关sa1和sb1、手控启动按钮开关sb4和sb7,遥控联动按钮开关sa2和sb2f、手控启动按钮开关sb5和sb8、无线远程控制联动按钮开关sa3和sb3、手控启动按钮开关sb6和sb9,射频遥控器、lora无线通信接口。
61.为了进一步实施上述技术方案,主控制系统中包括通用继电器,通用继电器线圈正极端口和线圈负极端口之间并联有保护二极管,保护二极管的正极端和通用继电器线圈负极端口相连,保护二极管的负极端和通用继电器的线圈正极端口相连,在通用继电器线圈两端并联二极管起到防止元件不被继电器线圈产生的感应电动势损坏的作用
62.s1:空气开关闭合,供电系统100进行供电,等待启动;
63.s2:启动指令发出后,接通软启停电路和延时制动电路;
64.s3:启动电动机,等待停止指令;
65.s4:停止指令发出后,接通坡道检测电路;
66.s5:检测到上下坡路段,则延时制动电路控制刹车抱死,未检测到上下坡路段,则延时制动电路控制延时刹车;
67.s6:延时制动电路控制动作结束后,电动机停止。
68.为了进一步实施上述技术方案,,启动电动机后触发防冲卡行程开关,切断电动机控制器启动状态,锁定电动机控制器停车状态,延时制动电路控制刹车抱死,电动机停止,等待按下反向启动按钮,解锁电动机控制器停车状态,重新启动电动机。
69.图4为本发明山地果园自走式电动单轨运输装备控制方法流程图;
70.步骤s1
‑
1,开始;
71.步骤s1
‑
2,打开空气开关,系统开始供电;
72.步骤s1
‑
3,判断是否有启动按钮按下,若是有启动按钮按下,执行步骤s1
‑
4,若是无启动按钮按下,执行步骤3;
73.步骤s1
‑
4,接通电机软启停电路;
74.步骤s1
‑
5,失电刹车制动器得电松开;
75.步骤s1
‑
6,启动电动机;
76.步骤s1
‑
7,判断是否有停止按钮按下,若是有停止按钮按下,执行步骤s1
‑
8,若是无停止按钮按下,执行步骤s1
‑
7;
77.步骤s1
‑
8,判断是否有检测到上下坡路段,若是有检测到上下坡路段,执行步骤1
‑
9,若是无检测到上下坡路段,执行步骤s1
‑
10;
78.步骤s1
‑
9,失电刹车制动器刹车抱死;
79.步骤s1
‑
11,停止电动机;
80.步骤s1
‑
12,结束。
81.图5为本发明山地果园自走式电动单轨运输装备控制方法中防冲卡保护电路控制流程图;
82.步骤s2
‑
1,系统开始运行;
83.步骤s2
‑
2,启动电动机;
84.步骤s2
‑
3,电动机启动后,判断是否触发防冲卡行程开关,若是触发防冲卡行程开关,执行步骤s2
‑
4;若无触发防冲卡行程开关,执行步骤s2
‑
3;
85.步骤s2
‑
4,切断电动机控制器启动状态;
86.步骤s2
‑
5,锁定电动机控制器停车状态;
87.步骤s2
‑
6,失电刹车制动器刹车抱死;
88.步骤s2
‑
7,停止电动机;
89.步骤s2
‑
8,电动机启动后,判断是否有反向启动按钮按下,若有反向启动按钮按下,执行步骤s2
‑
9;若无有反向启动按钮按下,执行步骤s7;
90.步骤s2
‑
9,解锁电动机控制器停车状态,等待下一次启动电动机。
91.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
92.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。