1.本发明涉及安装工程车技术领域,更具体为一种基于智能语音控制的大型室内安装工程车。
背景技术:
2.大型室内安装工程是指大型超市、大型舞厅、大型饭店等公共场所室内内部装修工程,也包含商品楼大型地下车库建造工程、人民防空地下工程、公路隧道等,这些工程往往需要在其上部或者顶部安装电灯、排风扇、通风管道等。随着经济的发展,我国大型室内安装工程获得了广阔的市场,据中国装饰行业协会数据显示,2015-2019年,我国大型室内安装工程的市场规模持续增长,年复合增长率cagr达到8.46%,2019年我国大型室内安装工程市场规模达到2.74万亿元。
3.目前而言,我国普遍将大型室内安装工程施工常见问题确定为顶部工程安装方面的过程繁琐。从目前实践来看,我国大型室内安装工程施工时工人们普遍使用的还是人字形工程梯,这样不仅移动不便,还需要在整个施工过程中不断地爬上爬下,增加了工人们的劳动强度,严重影响了整个工程进度,工人们的安全也得不到保障。因此,需要提供一种新的技术方案给予解决。
技术实现要素:
4.本发明的目的在于提供一种基于智能语音控制的大型室内安装工程车,解决了现有的印刷系统在使用过程中容易出现褶皱容易造成产品瑕疵,同时印刷的油墨干燥慢,需要重新进行干燥工序,造成加工效率慢的问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于智能语音控制的大型室内安装工程车,包括:车架,所述车架的上部设置有挡板且挡板与车架之间固定连接,所述车架的底部设置有转向轴且转向轴的侧面设置有固定架,所述固定架的内部设置有联动轴且联动轴的两侧设置有移动轮,所述固定架的侧面设置有车辆转向系统,所述车架的内上部设置有升降机构且升降机构包括第一升降杆和第二升降杆,所述第一升降杆和第二升降杆之间呈交叉状设置且第一升降杆和第二升降杆的交叉连接处设置有转轴,所述转轴的侧面设置有连接轴,所述第一升降杆底部与车架之间固定连接并通过铰链转动且第二升降杆的上部设置有台板,所述第二升降杆的上部与台板之间固定连接并通过铰链转动,所述第一升降杆的上端设置有第二导轮且第二升降杆的下端设置有第一导轮,所述第一导轮和第二导轮分别与车架和台板之间滚动连接,所述车架的内部设置有液压机构,所述第二升降杆之间设置有支撑架且支撑架的上部设置有液压缸,所述液压缸与支撑架之间转动连接且输出端设置有伸缩杆,所述伸缩杆与连接轴之间相连接,所述台板的上部设置有安全围栏且安全围栏的上部设置有控制盒,所述车架的底部设置有电控箱且电控箱与控制盒之间电性连接,所述控制盒的内部设置有智能语音控制系统,所述挡板的侧面设置有固定套管且固定套管的内部设置有连接杆,所述连接杆与固定套管之间转动连接且侧面设置有把手,所
述连接杆的底部与车辆转向系统之间相连接。
6.作为本发明的一种优选实施方式,所述车架的底部设置有电池箱且挡板的侧面设置有踏板,所述踏板的表面设置有直流电压转换装置且直流电压转换装置与电池箱之间电性连接。
7.作为本发明的一种优选实施方式,所述转向系统包括安装在固定架侧面的转向杆,所述转向杆的侧面设置有第一曲柄连杆且第一曲柄连杆的侧面设置有第二曲柄连杆,所述第二曲柄连杆的侧面设置有第三曲柄连杆,所述第一曲柄连杆、第二曲柄连杆和第三曲柄连杆之间均转动连接。
8.作为本发明的一种优选实施方式,所述连接杆的底部设置有从动齿轮且从动齿轮的下部与第三曲柄连杆之间相连接,所述挡板的侧面设置有直流转向电机且直流转向电机的动力输出端设置有主动齿轮,所述主动齿轮与从动齿轮之间相互啮合。
9.作为本发明的一种优选实施方式,所述固定架的侧面设置有激光导向器且激光导向器通过导线与电控箱之间电性连接。
10.作为本发明的一种优选实施方式,所述台板的表面设置有防滑凸块且防滑凸块设置有若干组并呈等间距分布。
11.作为本发明的一种优选实施方式,所述控制器的上部设置有安装架且安装架的内侧设置有照明灯,所述照明灯与控制器之间转动连接。
12.与现有技术相比,本发明的有益效果如下:
13.本发明以小型四轮电动升降车为载体,在小型四轮电动升降车的转向系统上增加一个大扭矩直流电机以及配套的传动齿轮,通过语音指令实现直流电机正反转运行,该扭矩通过齿轮传动到小型四轮电动车的转向机构上,从而通过工人发出的语音指令实现对小型四轮电动车的转向控制;通过控制电路(后面描述)实现小型四轮电动升降车的前进、后退,以及升降平台的上升或下降,行驶过程通过安装在小型四轮电动升降车两前轮转轴的激光导航所指示的方向以及要去的目标发出相应的语音指令到达所需要的作业空间。考虑到工人对本项目的操作有一个适应的过程,项目可采用两种模式工作:模式一,人工驾驶方式:工人先人工驾驶小型四轮电动升降车到需要作业的区域,到达区域后再站到升降平台上通过上升下降按钮到达作业空间,结束后再将平台降到最低离开平台,再人工驾驶到下一个区域;模式二,语音驾驶模式:施工时工人可以直接站在小型四轮电动升降车的平台上,通过发出语音口令使得工程车实现前进、后退、左转、右转、上升、下降,从而到达工人所需要作业的空间,完成相应的工程任务。结束后也可通过语音口令到达下一个需要作业的空间,两种模式通过模式切换系统相互切换。
附图说明
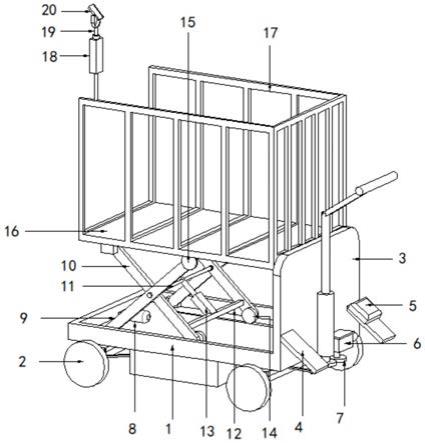
14.图1为本发明整体结构示意图;
15.图2为本发明侧视结构示意图;
16.图3为本发明正视结构示意图;
17.图4为本发明底部结构示意图;
18.图5为本发明俯视结构示意图;
19.图6为本发明语音控制电路示意图;
20.图7为本发明车辆控制电路示意图。
21.图中:1、车架;2、移动轮;3、挡板;4、踏板;5、直流电压转换装置;6、直流转向电机;7、主动齿轮;8、液压机构;9、第一升降杆;10、第二升降杆;11、连接轴;12、支撑架;13、液压缸;14、第一导轮;15、第二导轮;16、台板;17、安全围栏;18、控制盒;19、安装架;20、照明灯;21、固定套管;22、连接杆;23、把手;24、电池箱;25、转轴;26、伸缩杆;27、转向轴;28、固定架;29、激光导向器;30、联动轴;31、转向杆;32、电控箱;33、第一曲柄连杆;34、第二曲柄连杆;35、第三曲柄连杆;36、从动齿轮;37、防滑凸块。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.请参阅图1-图7,本发明提供一种技术方案:一种基于智能语音控制的大型室内安装工程车,包括:车架1,所述车架1的上部设置有挡板3且挡板3与车架1之间固定连接,所述车架1的底部设置有转向轴27且转向轴27的侧面设置有固定架28,所述固定架28的内部设置有联动轴30且联动轴30的两侧设置有移动轮2,所述固定架28的侧面设置有车辆转向系统,所述车架1的内上部设置有升降机构且升降机构包括第一升降杆9和第二升降杆10,所述第一升降杆9和第二升降杆10之间呈交叉状设置且第一升降杆9和第二升降杆10的交叉连接处设置有转轴25,所述转轴25的侧面设置有连接轴11,所述第一升降杆9底部与车架1之间固定连接并通过铰链转动且第二升降杆10的上部设置有台板16,所述第二升降杆10的上部与台板16之间固定连接并通过铰链转动,所述第一升降杆9的上端设置有第二导轮15且第二升降杆10的下端设置有第一导轮14,所述第一导轮14和第二导轮15分别与车架1和台板16之间滚动连接,所述车架1的内部设置有液压机构8,所述第二升降杆10之间设置有支撑架12且支撑架12的上部设置有液压缸13,所述液压缸13与支撑架12之间转动连接且输出端设置有伸缩杆26,所述伸缩杆26与连接轴11之间相连接,由车架1配合内部的升降机构组成小型四轮电动升降车,其长1.2米,宽0.7米,升降高度为0.4米到2米,升降平台的载重为500公斤,小型四轮电动升降车的上述技术参数可以看到该小型四轮电动升降车完全满足大型室内安装工程的需要。考虑到工人师傅在升降平台上安全操作需要,我们在升降平台的四周安装一个0.9米高的围栏,工作时工人打开围栏门站到升降平台上,关闭并锁紧围栏门,从而达到安全施工的目的,所述台板16的上部设置有安全围栏17且安全围栏17的上部设置有控制盒18,所述车架1的底部设置有电控箱32且电控箱32与控制盒18之间电性连接,所述控制盒18的内部设置有智能语音控制系统,智能语音控制系统是语音信号的采集以及处理与判断,采用非特定人声模式,其核心芯片为ld3320,ld3320是一颗基于非特定人声语音识别技术的语音识别芯片,或者说是语音声控芯片。该系统模块有三个工作模式:1.普通模式;2.口令模式;3.按键触发模式。不同的工作模式可以通过程序编程来实现。普通模式就是模块工作时,我们直接说话,模块直接识别。口令模式就是模块工作时,我们先要说出一个一级口令,模块在识别到正确的一级口令后才进行下一级的识别(通过语音口令唤醒芯片ld3320)。按键触发模式就是模块工作时,我们在进行语音识别之前,需要先按一
下按键,接下来才能进行下一步的识别。这三个模式口令模式比较实用,用口令模式去控制io口高低电平的变化,进而去控制每一个继电器的闭合与断开,从而实现利用语音口令控制小型四轮电动升降车方便的到达指定作业空间进行作业,同样还是利用语音口令控制小型四轮电动升降车到达下一个作业空间如此循环往复。编程时我们将“前进”、“后退”、“上升”、“下降”、“左转”、“右转”、“打开照明”、“关闭照明”等语音指令输入到ld3320的数据库内,唤醒整个语音控制系统,在此期间根据现场施工的需要发出相应的语音指令,控制小型四轮电动车到达施工作业空间,设定60秒内如果没有新的语音口令,系统自动进入休眠状态,在此期间发出任何语音口令系统将不再自动应答,只有重新唤醒系统才可继续工作,具体控制电路如图6和图7所示,所述挡板3的侧面设置有固定套管21且固定套管21的内部设置有连接杆22,所述连接杆22与固定套管21之间转动连接且侧面设置有把手23,所述连接杆22的底部与车辆转向系统之间相连接。
24.进一步改进的,如图4所示:所述车架1的底部设置有电池箱24且挡板3的侧面设置有踏板4,所述踏板4的表面设置有直流电压转换装置5且直流电压转换装置5与电池箱24之间电性连接,由于车载电池箱24的电压为直流48v,控制系统电压为24v,故采用48v变24v直流转换模块与控制系统实现电压匹配。
25.进一步改进的,如图4所示:所述转向系统包括安装在固定架28侧面的转向杆31,所述转向杆31的侧面设置有第一曲柄连杆33且第一曲柄连杆33的侧面设置有第二曲柄连杆34,所述第二曲柄连杆34的侧面设置有第三曲柄连杆35,所述第一曲柄连杆33、第二曲柄连杆34和第三曲柄连杆35之间均转动连接,人工驾驶模式下驾驶员转动龙头把手23,使得第三曲柄连杆35带动第二曲柄连杆34前后摆动,这样就带动第一曲柄连杆33摆动,从而使转向杆31左右移动,这样就可以通过转动龙头把手23实现车辆左右行驶。
26.进一步改进的,如图1、4所示:所述连接杆22的底部设置有从动齿轮36且从动齿轮36的下部与第三曲柄连杆35之间相连接,所述挡板3的侧面设置有直流转向电机6且直流转向电机6的动力输出端设置有主动齿轮7,所述主动齿轮7与从动齿轮36之间相互啮合,当操作者发出“左转”或“右转”的语音口令时,直流转向电机6正反转旋转,其扭矩通过主动齿轮7和从动齿轮36传递到第三曲柄连杆35上,经第二曲柄连杆34和第一曲柄连杆33传递至转向杆31,这样就代替旋转龙头把手23实现了小车的“左转”或“右转”,具体控制电路如图6和图7所示。
27.进一步改进的,如图4所示:所述固定架28的侧面设置有激光导向器29且激光导向器29通过导线与电控箱32之间电性连接,在前移动轮2的转轴25处安装两个绿色的“一字”激光导向器29,操作者可以根据两条相互平行的激光线指向判断出小车前轮所处的方向,同时操作者可以根据激光线的指向方便的发出相应的口令。
28.进一步改进的,如图5所示:所述台板16的表面设置有防滑凸块37且防滑凸块37设置有若干组并呈等间距分布,此种设置保证了台板16表面的摩擦力,避免施工人员打滑。
29.进一步改进的,如图1所示:所述控制器的上部设置有安装架19且安装架19的内侧设置有照明灯20,所述照明灯20与控制器之间转动连接,照明装置的设置方便施工人员进行施工。
30.本发明由车架1配合内部的升降机构组成小型四轮电动升降车,其长1.2米,宽0.7米,升降高度为0.4米到2米,升降平台的载重为500公斤,小型四轮电动升降车的上述技术
参数可以看到该小型四轮电动升降车完全满足大型室内安装工程的需要。考虑到工人师傅在升降平台上安全操作需要,我们在升降平台的四周安装一个0.9米高的围栏,工作时工人打开围栏门站到升降平台上,关闭并锁紧围栏门,从而达到安全施工的目的,智能语音控制系统是语音信号的采集以及处理与判断,采用非特定人声模式,其核心芯片为ld3320,ld3320是一颗基于非特定人声语音识别技术的语音识别芯片,或者说是语音声控芯片。该系统模块有三个工作模式:1.普通模式;2.口令模式;3.按键触发模式。不同的工作模式可以通过程序编程来实现。普通模式就是模块工作时,我们直接说话,模块直接识别。口令模式就是模块工作时,我们先要说出一个一级口令,模块在识别到正确的一级口令后才进行下一级的识别(通过语音口令唤醒芯片ld3320)。按键触发模式就是模块工作时,我们在进行语音识别之前,需要先按一下按键,接下来才能进行下一步的识别。这三个模式口令模式比较实用,用口令模式去控制io口高低电平的变化,进而去控制每一个继电器的闭合与断开,从而实现利用语音口令控制小型四轮电动升降车方便的到达指定作业空间进行作业,同样还是利用语音口令控制小型四轮电动升降车到达下一个作业空间如此循环往复。编程时我们将“前进”、“后退”、“上升”、“下降”、“左转”、“右转”、“打开照明”、“关闭照明”等语音指令输入到ld3320的数据库内,唤醒整个语音控制系统,在此期间根据现场施工的需要发出相应的语音指令,控制小型四轮电动车到达施工作业空间,设定60秒内如果没有新的语音口令,系统自动进入休眠状态,在此期间发出任何语音口令系统将不再自动应答,只有重新唤醒系统才可继续工作,具体控制电路如图6和图7所示,人工驾驶模式下驾驶员转动龙头把手23,使得第三曲柄连杆35带动第二曲柄连杆34前后摆动,这样就带动第一曲柄连杆33摆动,从而使转向杆31左右移动,这样就可以通过转动龙头把手23实现车辆左右行驶,当操作者发出“左转”或“右转”的语音口令时,直流转向电机6正反转旋转,其扭矩通过主动齿轮7和从动齿轮36传递到第三曲柄连杆35上,经第二曲柄连杆34和第一曲柄连杆33传递至转向杆31,这样就代替旋转龙头把手23实现了小车的“左转”或“右转”,具体控制电路如图6和图7所示,在前移动轮2的转轴25处安装两个绿色的“一字”激光导向器29,操作者可以根据两条相互平行的激光线指向判断出小车前轮所处的方向,同时操作者可以根据激光线的指向方便的发出相应的口令。
31.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。