1.本技术涉及汽车安全防护技术领域,具体涉及一种应对汽车追尾碰撞的保护系统及保护方法。
背景技术:
2.在汽车安全评价标准方面,有c-ncap、e-ncap、j-ncap、iihs等。其中c-ncap,全称china new car assessment program,中国新车评价规程;e-ncap全称european new car assessment program,欧盟新车安全评鉴协会,同样也是汽车界最具权威的安全认证机构之一;iihs,全称insurance institute for highway safety,美国公路安全保险协会,是汽车界最具权威的安全认证机构之一,它的碰撞测试标准也最为严苛;j-ncap,全称japan new car assessment program,为日本新车评价规程。e-ncap一直是行业的标杆。e-ncap要求的要求更高更严格,c-ncap、j-ncap都是以e-ncap为风向标进行改进。汽车碰撞中,c-ncap、e-ncap、j-ncap、iihs等评价机构均会基于各自不同类型的碰撞工况对人体损伤进行评估。
3.汽车实际使用中,追尾属于非常典型的一种道路交通事故,追尾事故中,被撞车辆的乘员运动呈现向后的相对运动形态,头颈部是主要损伤部位,整个损伤机理是因为头部与上躯干相对运动过大或者过快而导致。鞭打伤害是指在追尾事故中,被碰撞车辆的驾驶员、乘员在碰撞加速度与头部惯性力的共同作用下,颈部会产生一个像鞭子猛抽的动作。事故后,伤者的颈部会感到不同程度的不适,这种伤害并不致命,但是伤后康复的过程非常复杂、漫长,有些甚至是不可治愈的永久伤害。在现有的国内外安全评价机构中,普遍采用鞭打试验来评估相应的性能表征。
4.现有应对方法中,主要采用主动头枕、减小头部与人体间隙等方式来处理,稀少的也有采用靠背气囊优化。例如主动防护的头枕装置,该装置包括头枕、活塞连杆、控制器,头枕包括可以移动的头枕移动部、固定在汽车座椅上的头枕固定部,头枕固定部内有气缸,气缸内壁与所述活塞连杆的一端滑动连接,活塞连杆的另一端与所述头枕移动部固定,气缸远离头枕移动部的一端与充气设备连接,气缸的侧壁还连接有泄气管,所述头枕固定部的下方设有乘员头部位移传感器,头枕移动部远离头枕固定部的一端设有压力传感器,气缸内壁设有气缸位移传感器。该方案针对追尾碰撞仅基于头枕保护,无法实现整个追尾工况下的整体保护。
5.现有的应对方法中,还有后碰撞避免和减轻系统,该方法使用从主车辆传感器收集的数据来生成至少在前侧和后侧接近所述主车辆的物体的虚拟地图,车载计算机确定主车辆前面和主车辆后面的交通状况。根据所述虚拟地图来确定正面碰撞和后碰撞将发生,以及根据所述正面碰撞和所述后碰撞将发生的所述确定来决定一个或多个损伤减轻措施。具体的,车载计算机确定碰撞避免操纵,计算机指示车辆控制单元来实施碰撞避免操纵,计算机可以附加地或可选地通过界面将碰撞避免操纵传输到驾驶员,在不可避免的碰撞的情况下,计算机确定并且启动损伤减轻措施。该方案是通过感知碰撞状态控制整车运动及调
整姿态来降低碰撞伤害的控制系统与方法,整个控制策略成本巨大,且实现十分困难。
技术实现要素:
6.针对现有技术中存在的缺陷,本技术的目的在于提供一种应对汽车追尾碰撞的保护系统及保护方法,在追尾碰撞前后分别采用防护措施,提高汽车追尾碰撞中对驾乘人员的防护水平,提高驾驶安全性。
7.为达到以上目的,采取的技术方案是:
8.本技术第一方面提供一种应对汽车追尾碰撞的保护系统,包括:
9.电动座椅,其包括座椅部分和座椅控制部分,座椅部分包括座椅、靠背、以及安全带,座椅控制部分包括控制座椅部分向前或向后旋转的电机;
10.雷达摄像头模块,其用于采集汽车后方的障碍物信息;
11.加速度传感器模块,其用于采集汽车的第一加速度信息;
12.用户信息获取模块,其用于获取上部质量和上部质心距离;上部质量指驾乘人员位于座椅上方部分身体的质量;上部质心距离指驾乘人员位于座椅上方部分身体的质心与电机的转轴中心的距离;
13.控制模块,其用于在发生追尾前,根据障碍物信息处理得到第一控制指令以控制汽车的避险操作;还用于在发生追尾碰撞时,根据第一加速度信息处理得到驾乘人员的第二加速度信息,根据上部质量、第二加速度信息、以及上部质心距离处理得到驾乘人员相对于靠背的冲击力矩及相应的第二控制指令,以控制电动座椅的后旋操作,后旋操作时电机扭矩不小于冲击力矩。
14.一些实施例中,所述座椅控制部分还包括控制安全带松紧的预张紧器;
15.所述第二控制指令还用于控制预张紧器收紧安全带。
16.一些实施例中,所述雷达摄像头模块包括:
17.雷达模块,其利用安装在汽车尾部的雷达采集汽车后方的雷达信号;
18.摄像头模块,其利用安装在汽车尾部的摄像头采集汽车后方的后方图像。
19.一些实施例中,发生追尾前,控制模块对一定时间段内采集的多个后方图像分别进行图像识别,以判断汽车后方预设距离内是否存在近距离跟车,并在判断存在近距离跟车时,对一定时间段内采集的多个雷达信号进行比对分析,以得到近距离跟车的跟车距离和跟车车速,控制模块根据跟车距离和跟车车速计算得到追车时间;
20.控制模块在判断追车时间小于预设阈值时,向电动座椅发送第一控制指令以控制其电机收紧安全带。
21.一些实施例中,加速度传感器模块包括:
22.车尾加速度传感器,其设置在汽车尾部,用于采集汽车尾部的车尾加速度;
23.车中部加速度传感器,其设置在汽车中通道,用于采集汽车中通道的车中部加速度;
24.第一加速度计算单元,其用于根据车尾加速度和第一加速度信息计算得到第一加速度信息。
25.一些实施例中,发生追尾时,控制模块根据预设加速度系数对第一加速度信息进行处理得到第二加速度信息。
26.一些实施例中,用户信息获取模块包括:
27.图像采集器,其设置在汽车内部的电动座椅前方,用于采集驾乘人员位于座椅上方部分身体的身体图像;和/或
28.接触传感器,其设置在靠背内部,用于采集驾乘人员头部与靠背的接触位置。
29.一些实施例中,用户信息获取模块包括:
30.称重传感器,其设置在座椅下方,用于采集驾乘人员位于座椅上方部分身体的上部质量;
31.质心距离计算单元,用于对身体图像进行图像识别得到驾乘人员位于座椅上方部分身体的身体高度或根据接触位置得到驾乘人员位于座椅上方部分身体的身体高度,根据预设的质心系数对身体高度进行处理得到上部质心距离。
32.一些实施例中,所述控制模块通过下述公式计算得到冲击力矩:
33.my=m*acc*s
34.其中,
35.my表示冲击力矩;
36.m表示上部质量;
37.acc表示第二加速度信息;
38.s表示上部质心距离。
39.本技术第二方面提供一种应对汽车追尾碰撞的保护方法,包括:
40.采集汽车后方的障碍物信息;
41.采集汽车的第一加速度信息;
42.获取上部质量和上部质心距离;上部质量指驾乘人员位于座椅上方部分身体的质量;上部质心距离指驾乘人员位于座椅上方部分身体的质心与电机的转轴中心的距离;
43.在发生追尾前,根据障碍物信息处理得到第一控制指令以控制汽车的避险操作;
44.在发生追尾碰撞时,根据第一加速度信息处理得到驾乘人员的第二加速度信息,根据上部质量、第二加速度信息、以及上部质心距离处理得到驾乘人员相对于靠背的冲击力矩及相应的第二控制指令以控制电动座椅的后旋操作,后旋操作时电机扭矩不小于冲击力矩;
45.所述电动座椅包括座椅部分和座椅控制部分,座椅部分包括座椅、靠背、以及安全带,座椅控制部分包括控制座椅部分向前或向后旋转的电机。
46.本技术提供的技术方案带来的有益效果包括:
47.针对人体鞭打损伤机理,制定完整的追尾碰撞保护策略,在发生追尾前对汽车后方的跟车情况进行监控以及时进行避险操作,在发生追尾时根据驾乘人员对电动座椅靠背的冲击程度向后旋转电动座椅靠背,从而对人体头颈和背部形成最优保护,还能在发生追尾时紧急收紧安全被,进一步增强对驾乘人员的保护,基于现有机构进行微调,即可实现全面的安全性能保护,实现低成本、高收益。
附图说明
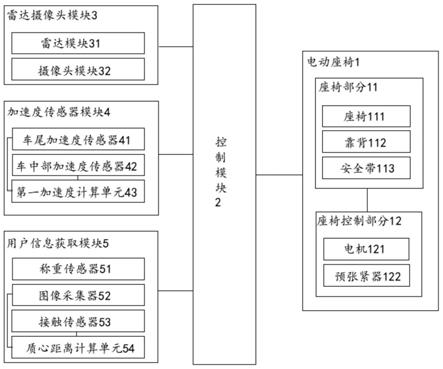
48.图1为本发明实施例中应对汽车追尾碰撞的保护系统的功能模块示意图。
49.图2为本发明实施例中应对汽车追尾碰撞的保护方法的流程图。
50.图3为本发明实施例中驾乘人员和安全座椅的示意图。
具体实施方式
51.以下结合附图及实施例对本技术作进一步详细说明。
52.先进驾驶辅助系统(advanced driver assistance system),简称adas,是利用安装于车上的各式各样的传感器,在第一时间收集车内外的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险,以引起注意和提高安全性的主动安全技术。adas采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的adas技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的adas技术来说,主动式干预也很常见。
53.参见图1所示,本发明实施例提供一种应对汽车追尾碰撞的保护系统,包括电动座椅1、雷达摄像头模块3、加速度传感器模块4、用户信息获取模块5、以及控制模块2。电动座椅1可前后旋转也可收紧放松其安全带113。雷达摄像头模块3采集汽车后方障碍物信息,用以判断汽车后方是否存在近距离跟车、近距离跟车相对本车的距离、以及近距离跟车相对本车的车速。用户信息获取模块5获取上部质量和上部质心距离。控制模块2在发生追尾前,根据障碍物信息处理得到第一控制指令以控制汽车的避险操作,即在判断存在近距离跟车且近距离跟车在短时间内即将追尾本车时控制本车进行避险操作。控制模块2在发生追尾碰撞时,根据第一加速度信息处理得到驾乘人员的第二加速度信息,根据上部质量、第二加速度信息、以及上部质心距离处理的得到驾乘人员相对于靠背112的冲击力矩及相应的第二控制指令以控制电动座椅1的后旋操作,后旋操作时电机121扭矩不小于冲击力矩。
54.保护系统针对人体鞭打损伤机理,制定完整的追尾碰撞保护策略,在发生追尾前对汽车后方的跟车情况进行监控以及时进行避险操作,在发生追尾时根据驾乘人员对电动座椅1的靠背112的冲击程度向后旋转电动座椅1的靠背112,从而对人体头颈和背部形成最优保护,还能在发生追尾时紧急收紧安全被,进一步增强对驾乘人员的保护,基于现有机构进行微调,即可实现全面的安全性能保护,实现低成本、高收益。
55.具体的,应对汽车追尾碰撞的保护系统,包括:
56.电动座椅1,其包括座椅部分11和座椅控制部分12,座椅部分11包括座椅111、靠背112、以及安全带113,座椅控制部分12包括控制座椅部分11前后旋转的电机121。
57.雷达摄像头模块3,其用于采集汽车后方的障碍物信息。
58.加速度传感器模块4,其用于采集汽车的第一加速度信息。
59.用户信息获取模块5,其用于获取上部质量和上部质心距离;上部质量指驾乘人员位于座椅111上方部分身体的质量。上部质心距离指驾乘人员位于座椅111上方部分身体的质心与电机121的转轴中心的距离。
60.控制模块2,其用于在发生追尾前,根据障碍物信息处理得到第一控制指令以控制汽车的避险操作。还用于在发生追尾碰撞时,根据第一加速度信息处理得到驾乘人员的第二加速度信息,根据上部质量、第二加速度信息、以及上部质心距离处理得到驾乘人员相对于靠背112的冲击力矩及相应的第二控制指令以控制电动座椅1的后旋操作,后旋操作时电
机121扭矩不小于冲击力矩。
61.本实施例中,电动座椅1、雷达摄像头模块3、以及加速度传感器模块4为智能汽车上常见部件,对于不具有这些模块的低端车辆来说也是容易配置的常见装置,可基于现有机构进行微调。控制模块2为气囊ecu中的现有模块,因此,保护系统基本采用现有装置即可实现保护效果。
62.保护系统针对人体鞭打损伤机理,制定完整的追尾碰撞保护策略,在发生追尾前对汽车后方的跟车情况进行监控以及时进行避险操作,在发生追尾时根据驾乘人员对电动座椅1的靠背112的冲击程度向后旋转电动座椅1的靠背112,从而对人体头颈和背部形成最优保护,还能在发生追尾时紧急收紧安全被,进一步增强对驾乘人员的保护,基于现有机构进行微调,即可实现全面的安全性能保护,实现低成本、高收益。
63.在较佳的实施例中,如图3所示,所述控制模块2通过下述公式计算得到冲击力矩:
64.my=m*acc*s
65.其中,my表示冲击力矩,m表示上部质量,acc表示第二加速度信息,s表示上部质心距离。
66.在本实施例中,在发生追尾时,通过上部质量和第二加速度信息可以计算出驾乘人员位于座椅111上方部分身体对靠背112的冲击力f=m*acc,该冲击力乘以上部质心距离即可得到驾乘人员位于座椅111上方部分身体对靠背112的冲击力矩,电动座椅1向后旋转时电机121的扭矩不小于该冲击力矩,即根据冲击力矩的大小调整电动座椅1向后倾倒的角度,从而卸掉追尾时靠背112对驾乘人员的冲击,让座椅111跟随人体背部运动,从而对人体头颈和背部形成最优保护。保护系统可以结合不同体型的驾乘人员形成最优保护,同时驾乘人员也可以结合自身状态进行调整输入参数对保护策略进行调整,例如预先手动输入用户体重。
67.上部质量还可以设置为可调模式,在用户购买车辆后基于自身需要进行调整预设。
68.在较佳的实施例中,所述座椅控制部分12还包括控制安全带113松紧的预张紧器122。
69.所述第二控制指令还用于控制预张紧器122收紧安全带113。
70.在本实施例中,在发生追尾时,预张紧器122接收第二控制指令后紧急收紧安全带113,避免驾乘人员身体大幅甩动。
71.在较佳的实施例中,所述雷达摄像头模块3包括:
72.雷达模块31,其利用安装在汽车尾部的雷达采集汽车后方的雷达信号。
73.摄像头模块32,其利用安装在汽车尾部的摄像头采集汽车后方的后方图像。
74.在本实施例中,雷达和摄像头的设置位置和设置数量可根据实际需要调整。同时采用雷达和摄像头对汽车后方的近距离跟车情况进行判断,能够提高在恶劣天气下的判断精度,例如避免在大雾天气下图像难以识别是否存在近距离跟车,则采用雷达探测的方式判断是否有后跟车辆。
75.在较佳的实施例中,发生追尾前,控制模块2对一定时间段内采集的多个后方图像分别进行图像识别以判断汽车后方预设距离内是否存在近距离跟车,并在判断存在近距离跟车时,对一定时间段内采集的多个雷达信号进行比对分析以得到近距离跟车的跟车距离
和跟车车速,控制模块2根据跟车距离和跟车车速计算得到追车时间。
76.控制模块2在判断追车时间小于预设阈值时,向电动座椅1发送第一控制指令以控制其电机121收紧安全带113。
77.在本实施例中,预设阈值可是指为4s,如果追车时间小于4s则发出第一控制信号,电机121收紧带全带座椅111,提前对人体进行束缚,矫正坐姿。如果追车时间不小于4s则发出第一控制信息,车内多媒体播放提醒语音。
78.在较佳的实施例中,加速度传感器模块4包括:
79.车尾加速度传感器41,其设置在汽车尾部,用于采集汽车尾部的车尾加速度。
80.车中部加速度传感器42,其设置在汽车中通道,用于采集汽车中通道的车中部加速度。
81.第一加速度计算单元43,其用于根据车尾加速度和第一加速度信息计算得到第一加速度信息。
82.在本实施例中,加速度传感器模块4是气囊ecu下属传感器模块,利用车尾加速度和车中部加速度通过均值或权重方法计算整车加速度为本领域技术人员熟知技术。
83.在较佳的实施例中,发生追尾时,控制模块2根据预设加速度系数对第一加速度信息进行处理得到第二加速度信息。
84.在本实施例中,预先设置加速度系数,在发生追尾时,将整车加速度乘以加速度系数即可得到电动座椅1或者说电动座椅1上的驾乘人员的加速度。
85.在较佳的实施例中,用户信息获取模块5包括:
86.图像采集器52,其设置在汽车内部的电动座椅1前方,用于采集驾乘人员位于座椅111上方部分身体的身体图像。和/或接触传感器53,其设置在靠背112内部,用于采集驾乘人员头部与靠背112的接触位置。
87.称重传感器51,其设置在座椅111下方,用于采集驾乘人员位于座椅111上方部分身体的上部质量。
88.质心距离计算单元54,用于对身体图像进行图像识别得到驾乘人员位于座椅111上方部分身体的身体高度或根据接触位置得到驾乘人员位于座椅111上方部分身体的身体高度,根据预设的质心系数对身体高度进行处理得到上部质心距离。
89.在本实施例中,控制模块2结合称重传感器51采集的乘员上肢重量参数即上部质量m进行评估,胸部上肢的加速度无法在事故中采集,可以采集后碰加速度即第二加速度信息acc来处理得到在追尾碰撞时驾乘人员对靠背112的冲击。以下几个具体的冲击力f的计算实例:
90.50%成年男性胸部质量17.19kg,设定成年男性为17kg以上,以胸部重心点为转动边界,可计算对靠背112的冲击力f=m*acc。
91.5%成年女性胸部质量12kg,设定成年女性质量范围为12~17kg,以胸部重心点为转动边界,可计算对靠背112的冲击力f=m*acc。
92.10岁的未成年胸部参考质量为5kg,设定未成年质量范围为5~12kg以胸部重心点为转动边界,可计算对靠背112的冲击力f=m*acc。
93.结合上部质量m和第二加速度信息acc,可以确认冲击力值f,进而计算得到冲击力矩my=f*s,即可得出电动座椅1所需的旋转力矩,让电动座椅1跟随人体背部运动,从而对
人体头颈和背部形成最优保护。
94.参见图3所示,本发明实施例还提供一种应对汽车追尾碰撞的保护方法,包括:
95.步骤s1、采集汽车后方的障碍物信息。
96.步骤s2、采集汽车的第一加速度信息。
97.步骤s3、获取上部质量和上部质心距离;上部质量指驾乘人员位于座椅111上方部分身体的质量;上部质心距离指驾乘人员位于座椅111上方部分身体的质心与电机121的转轴中心的距离。
98.步骤s4、在发生追尾前,根据障碍物信息处理得到第一控制指令以控制汽车的避险操作。
99.步骤s5、在发生追尾碰撞时,根据第一加速度信息处理得到驾乘人员的第二加速度信息,根据上部质量、第二加速度信息、以及上部质心距离处理得到驾乘人员相对于靠背112的冲击力矩及相应的第二控制指令以控制电动座椅1的后旋操作,后旋操作时电机121扭矩不小于冲击力矩。
100.步骤s1至s3可同时进行。
101.所述电动座椅1包括座椅部分11和座椅控制部分12,座椅部分11包括座椅111、靠背112、以及安全带113,座椅控制部分12包括控制座椅部分11前后旋转的电机121。
102.在本实施例中,电动座椅1、雷达摄像头模块3、以及加速度传感器模块4为智能汽车上常见部件,对于不具有这些模块的低端车辆来说也是容易配置的常见装置,可基于现有机构进行微调。控制模块2为气囊ecu中的现有模块,因此,保护系统基本采用现有装置即可实现保护效果。
103.保护系统针对人体鞭打损伤机理,制定完整的追尾碰撞保护策略,在发生追尾前对汽车后方的跟车情况进行监控以及时进行避险操作,在发生追尾时根据驾乘人员对电动座椅1的靠背112的冲击程度向后旋转电动座椅1的靠背112,从而对人体头颈和背部形成最优保护,还能在发生追尾时紧急收紧安全被,进一步增强对驾乘人员的保护,基于现有机构进行微调,即可实现全面的安全性能保护,实现低成本、高收益。
104.在较佳的实施例中,通过下述公式计算得到冲击力矩:
105.my=m*acc*s
106.其中,my表示冲击力矩,m表示上部质量,acc表示第二加速度信息,s表示上部质心距离。
107.在本实施例中,发生追尾前,控制模块2对一定时间段内采集的多个后方图像分别进行图像识别以判断汽车后方预设距离内是否存在近距离跟车,并在判断存在近距离跟车时,对一定时间段内采集的多个雷达信号进行比对分析以得到近距离跟车的跟车距离和跟车车速,控制模块2根据跟车距离和跟车车速计算得到追车时间。
108.控制模块2在判断追车时间小于预设阈值时,向电动座椅1发送第一控制指令以控制其电机121收紧安全带113。预设阈值可是指为4s,如果追车时间小于4s则发出第一控制信号,电机121收紧带全带座椅111,提前对人体进行束缚,矫正坐姿。如果追车时间不小于4s则发出第一控制信息,车内多媒体播放提醒语音。
109.在发生追尾时,通过上部质量和第二加速度信息可以计算出驾乘人员位于座椅111上方部分身体对靠背112的冲击力f=m*acc,该冲击力乘以上部质心距离即可得到驾乘
人员位于座椅111上方部分身体对靠背112的冲击力矩,电动座椅1向后旋转时电机121的扭矩不小于该冲击力矩,即根据冲击力矩的大小调整电动座椅1向后倾倒的角度,从而卸掉追尾时靠背112对驾乘人员的冲击,让座椅111跟随人体背部运动,从而对人体头颈和背部形成最优保护。保护系统可以结合不同体型的驾乘人员形成最优保护,同时驾乘人员也可以结合自身状态进行调整输入参数对保护策略进行调整,例如预先手动输入用户体重。
110.上部质量还可以设置为可调模式,在用户购买车辆后基于自身需要进行调整预设。
111.本技术不局限于上述实施方式,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本技术的保护范围之内。