1.本发明涉及行车安全技术领域,具体涉及一种驾驶员识别策略选择方 法及装置。
背景技术:
2.随着社会经济的发展,路面上的车辆越来越多,人们的生活节奏也越 来越快,很多人为了省时间习惯一边开车一边打电话甚至出现玩手机的行 为,尤其是打电话时驾驶员反应速度比正常情况下慢两倍,视野范围缩小 近一半,开车打电话的事故风险是正常情况下的四倍,这些行为严重影响 交通安全,急需一种识别装置用来提醒和规范驾驶员安全驾驶。
3.现有技术中文献cn101364814、cn105391869a、cn104966059b、 cn108205649b以及cn107481724a均公开了对驾驶员的来电呼叫进行识 别与控制的方法。但是,现有技术中对驾驶员的识别手段比较单一,不能 够根据车辆的实时状态进行识别手段的灵活选择。
技术实现要素:
4.本发明所要解决的技术问题在于如何提供一种驾驶员识别策略选择方 法及装置以能够根据车辆的实时状态进行识别手段的灵活选择。
5.本发明通过以下技术手段实现解决上述技术问题的:
6.第一方面,本发明提供了一种驾驶员识别策略选择方法,应用于车载 终端,所述方法包括:
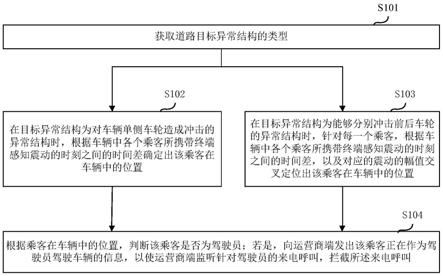
7.获取道路目标异常结构的类型,其中,所述目标异常结构类型包括: 对车辆单侧车轮造成冲击的类型,能够分别冲击前后车轮的类型,且目标 异常结构包括:路面凸起以及路面凹陷中的一种或组合;
8.在目标异常结构为对车辆单侧车轮造成冲击的异常结构时,根据车辆 中各个乘客所携带终端感知震动的时刻之间的时间差确定出该乘客在车辆 中的位置,
9.在目标异常结构为能够分别冲击前后车轮的异常结构时,针对每一个 乘客,根据车辆中各个乘客所携带终端感知震动的时刻之间的时间差,以 及对应的震动的幅值交叉定位出该乘客在车辆中的位置,其中,所述震动 为车轮碾压道路上的目标异常结构产生的;
10.根据乘客在车辆中的位置,判断该乘客是否为驾驶员;若是,向运营 商端发出该乘客正在作为驾驶员驾驶车辆的信息,以使运营商端监听针对 驾驶员的来电呼叫,拦截所述来电呼叫。
11.可选的,
12.所述获取道路目标异常结构的类型,包括:
13.利用车载摄像头识别出道路上的道路异常结构;
14.针对每一个道路异常结构,基于车载摄像头拍摄范围内物体的先验尺 度特征,计算出所述道路异常结构的结构特征数据,其中,所述结构特征 数据包括:道路异常结构的
横向尺度、道路异常结构的纵向尺度、道路异 常结构的高度、道路异常结构所处的分布区域中的一种或组合;
15.根据道路异常结构的结构特征数据与车辆车轮的相对位置,确定出车 辆车轮碾压道路异常结构的碾压次数,并判断碾压次数是否大于等于两次;
16.在碾压次数大于等于两次的情况下,将该道路异常结构作为目标异常 结构;
17.根据目标异常结构对车辆车轮的冲击特征,确定出目标异常结构的类 型。
18.可选的,所述根据目标异常结构对车辆车轮的冲击特征,确定出目标 异常结构的类型,包括:
19.识别出车辆的车轮碾压目标异常结构的顺序次序;
20.根据所述顺序次序以及车轮碾压目标异常结构的次数,判断是否是单 侧车轮碾压目标异常结构,若是,将目标异常结构的类型设置为对车辆单 侧车轮造成冲击的类型;若是,将目标异常结构的类型设置为能够分别冲 击前后车轮的类型。
21.可选的,所述确定出车辆车轮碾压道路异常结构的碾压次数,包括:
22.识别出车辆在当前时刻的运动轨迹,并根据车辆方向盘的转角对所述 运动轨迹进行预测延伸,得到延伸轨迹;
23.根据延伸轨迹、车辆的轮距和轴距,计算出车辆各个车轮的预测轨迹;
24.针对每一个车轮的预测轨迹,根据所述预测轨迹与道路异常结构的交 叉特征,判断该车轮是否会碾压道路异常结构,进而累计出车辆车轮碾压 道路异常结构的碾压次数。
25.可选的,所述根据车辆中各个乘客所携带终端感知震动的时刻之间的 时间差,以及对应的震动的幅值交叉定位出该乘客在车辆中的位置,包括:
26.利用车辆中乘客携带的终端设备感知车轮碾压目标异常结构时产生的 震动,根据震动最大值所在时刻确定出对应的时间戳;
27.根据所述时间戳以及震动幅值,得到震动的分布特征,根据所述分布 特征以及顺序次序确定出乘客在车辆中的位置。
28.可选的,在向运营商端发出该乘客正在作为驾驶员驾驶车辆的信息时, 所述方法还包括:
29.基于乘客的手机定位信息,确定出乘客的移动速度,在该乘客的移动 速度小于设定阈值的情况下,结束执行。
30.第二方面,本发明还提供了一种驾驶员识别策略选择方法,应用于运 营商端,所述方法包括:
31.接收如上述任一项所述的该乘客正在座位驾驶员驾驶车辆的信息时;
32.监听针对驾驶员的来电呼叫,拦截所述来电呼叫。
33.可选的,在监听针对驾驶员的来电呼叫的步骤之前,所述方法还包括:
34.获取车载终端在当前时刻的定位信息,以所述定位信息对应的坐标为 中心,以预设距离为半径,获取对应圆周范围内的所有手机号码以及对应 的机主姓名;
35.将机主姓名与驾驶员的姓名进行比对,得到与驾驶员的姓名对应的目 标号码;
36.所述监听针对驾驶员的来电呼叫,包括:
37.监听发现目标手机号的来电呼叫。
38.可选的,所述方法还包括:
39.向来电方发出是否进行留言的语音提示,在收到来电方的确认信息的 情况下,接收来电方的语音消息,并在接收如上述任一项所述方法执行结 束时向驾驶员播放;
40.或者,
41.在驾驶员结束驾驶时,将所述来电呼叫转换为来电提醒发送至驾驶员 手机。
42.第三方面,本发明还提供了一种驾驶员识别策略选择装置,包括车载 终端以及运营商端,其中,
43.车载终端用于执行如第一方面任一项所述的方法;
44.运营商端用于执行如第二方面任一项所述的方法。
45.本发明的优点在于:
46.应用本发明实施例,根据车辆相对于目标异常结构的不同姿态选择不 同的驾驶员识别策略,可以根据车辆的实时状态进行识别手段的灵活选择。
附图说明
47.图1为本发明实施例提供的一种驾驶员识别策略选择方法的流程示意 图;
48.图2为本发明实施例提供的一种驾驶员识别策略选择方法中基于第一 次震动的定位原理示意图;
49.图3为本发明实施例提供的一种驾驶员识别策略选择方法中基于第一 次震动对应的震动分布示意图;
50.图4为本发明实施例提供的一种驾驶员识别策略选择方法中基于第二 次震动的定位原理示意图;
51.图5为本发明实施例提供的一种驾驶员识别策略选择方法中基于第二 次震动对应的震动分布示意图;
52.图6为本发明实施例中第二次震动的震动相对于第一次震动的分布示 意图。
具体实施方式
53.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本 发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然, 所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发 明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得 的所有其他实施例,都属于本发明保护的范围。
54.实施例1
55.图1为本发明实施例提供的一种驾驶员识别策略选择方法的流程示意 图,如图1所示,该方法包括:
56.s101:获取道路目标异常结构的类型,其中,所述目标异常结构类型 包括:对车辆单侧车轮造成冲击的类型,能够分别冲击前后车轮的类型, 且目标异常结构包括:路面凸起以及路面凹陷中的一种或组合。
57.首先需要说明的是,本发明实施例中所述的目标异常结构可以为:桥 梁膨胀缝100、水泥路面伸缩缝、沟槽、坑洞、减速带、道路标线。以道 路标签为例,现有的道路标线均为涂覆厚度为1.8mm-3mm的热熔涂料。 因此,在车辆200碾压道路标线时,也会产生相应的震动,进而被乘客携 带的终端设备中的加速度计或者加速度计感知到。尤其在车辆200经
过路 口时,车辆200在经过路口一般会进行变道操作,或者穿过路口停止线, 或者穿过人行道标线,车辆200均会碾压到对应的标线进而产生震动信号; 其中,车辆200在路口变道选择更加合理的车道时车轮产生的震动信号在 时域上的差别更加明显。车辆200在经过路口停止线时,车辆200一般不 会严格沿着垂直于路口停止线的方向行驶,也就是说,车辆200在经过路 口停止线时,两个车辆200前轮或者两个车辆200后轮之间可能会存在很 小的时间差,进而产生两个震动信号。类似的,车辆200在驶过人行横道 时,也会产生对应的若干个震动信号。
58.现在汽车大多都装有行车记录仪,虽然现有行车记录仪摄像头的清晰 度不高,但是识别出道路上的道路异常结构如:桥梁膨胀缝100、水泥路 面伸缩缝、沟槽、坑洞、减速带、道路标线已经足够了。
59.由于大部分停车场出入口均设有减速带,因此,可以在车辆200刚起 步时候就开始利用图像识别算法识别出行车记录仪拍摄画面中包括的道路 异常结构。这样车速较低,且车辆200在停车场内大多会发生较大角度的 转向,因此,各个轮子碾压目标异常结构产生的震动之间的时间间隔足够 场,利于识别。
60.针对每一个道路异常结构,基于车载摄像头拍摄范围内物体的先验尺 度特征,计算出所述道路异常结构的结构特征数据,其中,所述结构特征 数据包括:道路异常结构的横向尺度、道路异常结构的纵向尺度、道路异 常结构的高度、道路异常结构所处的分布区域中的一种或组合。例如,当 识别出行车记录仪拍摄的画面中包括了一条桥梁的膨胀缝100时,利用拍 摄画面中包含的车道宽度、道路标线宽度、车辆200高度以及行人高度等 已知数据等比例换算出桥梁膨胀缝100上各点相对于车辆200的距离、以 及其与道路中心线之间的夹角。当行车记录仪拍摄的画面中出现了不规则 的膨胀缝100时,利用拍摄画面中包含的已知数据,计算出膨胀缝100的 横向尺度、纵向尺度,深度;当行车记录仪拍摄的画面中出现了减速带时, 利用拍摄画面中包含的已知数据,计算出减速带上各点相对于车辆200的 距离、以及其与道路中心线之间的夹角。然后,可以根据车辆200的方向 盘角度以及车速积分出车辆200在当前时刻时的运动轨迹,再根据车辆 200在当前时刻的角度数据对车辆200的未来轨迹进行预测,得到延伸轨 迹。该轨迹通常是已车辆200中心点为基点积分出来的,而车轮位于车辆 200两侧,且具有较大的轮距,因此,将延伸轨迹向两侧平移,并结合时 间数据,进而可以得到车辆200的各个车轮对应的预测轨迹。
61.针对每一个车轮,当该车轮的预测轨迹与道路异常结构发生交叉时, 则判定该车轮会碾压道路异常结构。进而确定出车辆200车轮碾压道路异 常结构的碾压次数,并判断碾压次数是否大于等于两次;在碾压次数大于 等于两次的情况下,将该道路异常结构作为目标异常结构。
62.使用两次碾压作为标准筛选目标异常结构,具有以下有益效果:在车 辆200中的乘客数量较多,和/或分布情况比较特殊时,例如,乘客甲作为 驾驶员驾车,乘客乙坐在右后座,且二者距离车辆200右前轮203的距离 近似,当车辆200右前轮203碾压道路异常结构时,二者采集震动的时间 戳比较接近或者相同时比较难以区分,加之手机之间进行时间同步的误差 以及手机运行性能的差异,进一步加剧了上述情况,因此,采用多次碾压 道路异常结构的震动进行交叉判断,可以准确识别出驾驶员。
63.因此,本发明实施例中使用行车记录仪的摄像头识别出道路上的异常 结构。然后
再对异常结构进行筛选得到目标异常结构。所述的目标异常结 构即为能够对车辆200产生两次及两次以上的震动的道路异常结构,使用 两次以及以上震动能够提高对驾驶员的识别精度。
64.进一步的,根据预设步长将时间轴划分为若干个时间分片,针对每一 个时间分片,判断该时间分片内是否存在两个或者两个以上的震动,若是, 将该时间分片内的震动合并为一个震动。
65.例如,将位于同一8ms长度的时间分片内左前轮207以及右前轮203 同时碾压道路异常结构的事件合并为一次碾压事件,也就是说,当两次真 实碾压产生的震动的时间戳比较接近或者相同时,或者时间同步存在误差 时,将不作区分,这样可以屏蔽时间戳比较精度或者时间同步精度带来的 误差。
66.进一步的,在车速高于设定阈值,如60km/h时,第二次震动优选使 用后轮碾压道路异常结构时产生的震动,因为车速较高时,乘客携带的终 端设备感知的左前轮207的震动会与右前轮203的震动发生叠加,影响识 别效果。
67.以进一步减少误差以及乘客分布导致的驾驶员判断准确率较低的技术 问题。
68.在本发明实施例的另一种实施方式中,可以获取车辆200在同一路段 的行驶数据中选择匀速行驶阶段的车辆第一行驶速度以及对应的第一牵引 力;并获取车辆加速阶段的车辆第二行驶速度以及对应的第二牵引力;
69.将第一行驶速度与第二行驶速度比较,在二者相同的情况下,利用对 应的第一牵引力与对应的第二牵引力之差计算出车辆的总重量;
70.根据车辆的总重量与整备质量之间的差值计算出车辆载重,根据车辆 载重估算出车辆乘客人数。
71.示例性的,由于牵引力可以根据车辆功率公式p=fv计算出,其中,
72.p为车辆牵引力,该功率值小于发动机输出功率,但是该值与发动机 输出功率之间的换算比例可以由厂家根据车辆传动特点计算出来;f为车 辆牵引力,v为车辆车速。
73.在加速过程中;f+m*a+d1=f1;
74.在匀速行驶中,f+d1=f2;
75.f为车辆行驶时的摩擦力;d1为车辆受到的阻力,包括风阻、滚阻之 和,由于车速相同,前述两个状态下车辆受到的阻力相同;m为车辆总重 量;a为车辆加速时的加速度,该值可以利用车载终端的加速度计进行测 量;f1位车辆在加速时的牵引力;f2为车辆在匀速时的牵引力。
76.上述两个公式相减,可得:
77.ma=f1-f2。
78.进而估算出车辆总重量,车辆总重量减去车辆整备质量,再减去车辆 油料重量即可得到车辆中乘客总重量,根据国内成年人体重均值,可以估 算出车辆中乘客人数。
79.当车辆200上的乘客(包括驾驶员)的人数为一人时,可以利用现有 技术中的速度判定、声音识别方法等判段该乘客是否正在驾驶车辆200。
80.在拦截针对乘客甲的来电呼叫后,保持对车辆200速度的监测,当车 辆200静止再次发生位移之后,再次执行本发明实施例1的流程。
81.在本发明实施例的另一种实施方式中,为了避免乘客携带的手机与基 站进行时
间同步产生的误差,利用车载联网设备辐射wifi信号,乘客携 带的手机自动连接,并以车载终端的时间为基准时间进行同步,这样可以 最大程度的削弱不同手机与基站进行通信产生的时间同步误差。
82.s102:在目标异常结构为对车辆单侧车轮造成冲击的异常结构时,根 据车辆中各个乘客所携带终端感知震动的时刻之间的时间差确定出该乘客 在车辆中的位置;
83.第一方面,本发明实施例1中以路面凹陷为桥梁膨胀缝100为例,按 照桥梁轴线与道路轴线之间的夹角的大小可以将桥梁分为正交桥和斜交桥, 正交桥是指桥梁的纵轴线与其跨越的河流流向或路线轴向垂直的桥梁。斜 交桥指的是桥梁的纵轴线与其跨越的河流流向或路线轴向不相垂直的桥梁。 正交桥一般常见于道路修建外部环境较好的地区,如平原、建筑物较少的 地区;斜交桥在国内被广泛应用于高等级公路、城市道路、立交枢纽以及 跨河流桥梁。从国外已有的研究成果看,斜交角是影响斜交桥地震反应的 主要设计参数之一,并分别进行了常遇地震影响下的反应谱分析以及罕遇 地震影响下的非线性时程分析。由于斜交桥的特性,支座沿支承线垂线方 向的变形随斜交角的增大而减小;在斜交角为60
°
时,斜交桥与相应的正 交桥相比,支座变形值约可减小50%。加之斜交桥有上述优点,因此,斜 交桥更加常见。尤其在南方跨河流桥梁建造中,为了尽量减小桥梁的正投 影面积,以减少桥梁的施工量,绝大多数的南方跨河流桥梁为斜交桥。而 膨胀缝100一般设置在桥梁与道路的接缝处、或者梁段与梁段之间的接缝 处,且斜向贯穿整个桥面。因此,斜交桥膨胀缝100长度延伸方向通常会 与道路纵向轴线呈一定的夹角,进而导致车辆200两个前轮之间碾压膨胀 缝100时可能会存在一定的时间差;类似的,当车辆200两个后轮碾压膨 胀缝100时也会存在一定的时间差;而且车辆200同一侧车轮由于车辆 200前进的关系,也会在前后轮碾压膨胀缝100的时刻之间存在一定的时 间差。因此,在汽车碾压斜交桥膨胀缝100时,很有可能对车辆200产生 3-4次震动。
84.另外,即使车辆200经过的是正交桥膨胀缝100,两个前轮同时碾压 膨胀缝100的概率也不是百分之百,两个前轮一般总会有3-20ms的时间 差异。也就是说汽车碾压正交桥膨胀缝100时,至少会产生2次震动,如 果车辆200速度较慢,且车辆200前进方向并未完全垂直膨胀缝100的长 度方向时,会产生4次震动。
85.现有的终端设备,如智能手环、智能手表、智能手机等均内置有 mems(micro electro mechanical system,微机电系统)加速度计,其对 震动极其敏感。例如,htc google nexus one智能手机的加速度计的型号 为博世bma150,其采样频率为27hz。有的手机加速度计的采样频率可 达100hz。a级轿车的轴距为2-2.7m,以车速80km计算,前后轮之间的 震动时间间隔为90-121.5ms,远远大于采样周期。车辆200以30km的速 度通过膨胀缝100就会发生很明显的撞击,甚至会产生车辆轻微弹跳,如 果以80km的速度通过膨胀缝100,撞击更加明显。因此,在车轮碾压膨 胀缝100产生震动时,加速度计可以测量到震动产生的异常脉冲,进而感 知到对应的震动;结合终端设备中的授时芯片,即可确定出震动对应的脉 冲值产生的时间戳。
86.图2为本发明实施例提供的一种驾驶员识别策略选择方法中基于第一 次震动的定位原理示意图;如图2所示,车辆按照箭头所示方向前进,车 辆200中容纳了甲乙丙丁三人。当右前轮203首先碾压了膨胀缝100,此 时,膨胀缝100会对右前轮203产生反作用力,进而导致右前轮203震动, 右前轮203的震动经过车辆200悬架、车身传递到乘客携带的终端
设备。 基于震动的传播规律,震动一般是以波的形式沿车辆200结构件大致以圆 周状向周围传播。因此,在车上不同座位的乘客的终端设备感知到震动信 号的时间戳存在先后的差别。因此,可以定位出各个乘客相对于右前轮 203的远近。
87.如图2所示,当右前轮203最先碾压斜交桥的膨胀缝100时,位于右 前位的乘客乙携带的手机最先感知到右前轮203的震动,其测量原理可以 为手机中电子加速度计测量的震动波形出现了尖峰脉冲,或者在某段周期 内波形变化率大于设定阈值。乘客乙的手机记录下尖峰脉冲幅值最大的时 刻-11,以及对应的最大幅值-11。
88.根据所述时间戳以及震动幅值,得到震动的分布特征,根据所述分布 特征以及顺序次序确定出乘客在车辆中的位置:图3为本发明实施例提供 的一种驾驶员识别策略选择方法中基于第一次震动对应的震动分布示意图, 如图3所示,当右前轮203碾压膨胀缝100时,不仅在乘客乙的手机中产 生震动301,其对应时刻-11以及最大幅值-11;震动传导之后,还会在乘 客甲的手机中产生震动302,其对应时刻-21以及最大幅值-21;类似的, 还会在左后排丁的手机中产生震动303,其对应时刻-31以及最大幅值-31; 会在右后排丙的手机中产生震动304,其对应时刻-41以及最大幅值-41。 根据图2和图3当且仅当右前轮203碾压了目标异常结构时,由于车辆 200座位分布关系,导致乘客甲与乘客乙之间的间距小于乘客乙与乘客丁 之间的间距,且乘客甲感知到震动的时刻-21稍微领先乘客丁对应的时刻
‑ꢀ
41。
89.因此,在基于s101步骤识别出当前次撞击为右前轮首先碾压膨胀缝 100形成的基础上,可以基于上述特征识别出以下结果:
90.乘客乙携带的终端最先识别出右前轮203的震动,其时间戳最前,且 幅值最强,因此乘客乙距离右前轮203最近,则乘客乙位于右前位;乘客 甲的时间戳虽然与乘客丁之间的时间戳比较接近,但是二者由于车辆200 座位分布关系,导致乘客甲与乘客乙之间的间距小于乘客乙与乘客丁之间 的间距,因此,乘客甲位于左前位;乘客丁位于右后位;乘客丙最后感知 到震动,因此,乘客丙位于左后位。
91.s103:在目标异常结构为能够分别冲击前后车轮的异常结构时,针对 每一个乘客,根据车辆中各个乘客所携带终端感知震动的时刻之间的时间 差,以及对应的震动的幅值交叉定位出该乘客在车辆中的位置,其中,所 述震动为车轮碾压道路上的目标异常结构产生的;
92.乘客与发生震动的车轮的距离越远,其震动的最大幅值越小。当车辆 200右前轮203碾压道路异常结构时,乘客乙对应震动301的幅值大于其 他乘客终端感知到的幅值,乘客甲对应震动302的幅值小于乘客乙的幅值, 乘客丁对应震动303的幅值小于乘客甲的幅值,乘客丙对应震动304的幅 值最小,因此,基于上述幅值及对应的时刻可以识别出各乘客在车辆200 内的分布。
93.通常情况下,当右前轮203碾压膨胀缝100时,其对右前位上的乘客 乙产生比较大的震动,因此第二个幅值的极大值对应的为乘客乙。后排乘 客可以不用识别。
94.类似的,为了进一步提高驾驶员识别准确率,本发明实施例以后轮碾 压膨胀缝100作为第二次震动为例进行说明。图4为本发明实施例提供的 一种驾驶员识别策略选择方法中基于第二次震动的定位原理示意图;图5 为本发明实施例提供的一种驾驶员识别策略选择方法中基于第二次震动对 应的震动分布示意图;如图4和图5所示,当在右后轮碾压
膨胀缝100时 产生的震动,乘客丁的终端最先感知到震动501;随着震动传导,会产生 以下次序:乘客丙感知到震动502,乘客乙感知到震动503,乘客甲感知 到震动504,且各个震动的幅值依次降低。
95.图6为本发明实施例中第二次震动的震动相对于第一次震动的分布示 意图,如图6所示,第一次震动的震动从t1时刻开始,第二次震动的震动 从t2时刻开始。以第二次震动为车辆200左前轮207碾压目标异常结构为 例:由于膨胀缝100一般是横向贯穿整个道路宽度范围,并且车辆200的 前进方向很难与膨胀缝100保持绝对垂直,因此,左前轮207与右前轮 203碾压膨胀缝100的时刻上存在细微差别,当在右前轮203轮碾压膨胀 缝100时产生的震动传导到后排乘客时,左前轮207还未碾压膨胀缝100。 因此,基于上述原理,利用加速度计识别出各个乘客对应的幅值以及时间 戳,进而识别出第一个震动对应的乘客距离左前轮最近,进而确定出乘客 甲为驾驶员。
96.因此,基于上述规律,乘客丁的终端设备最先识别出右后轮的震动, 则乘客丁距离右后轮最近,因此,乘客丁位于右后位;乘客乙的时间戳虽 然与乘客丙之间的时间戳比较接近,但是二者由于车辆200座位分布关系, 导致乘客丙丁之间的间距小于与乘客乙丁之间的间距,因此,乘客乙位于 右前位;乘客丙位于左后位;乘客甲最后感知到震动,因此,乘客甲位于 左前位。
97.可以理解的是,前轮与后轮之间间距较大,因此,前轮碾压膨胀缝 100与后轮碾压膨胀缝100之间的时间间隔较长,因此,更容易识别出来, 因此,进一步的,当第二次震动仍然无法准确分辨出乘客甲与乘客丁之间 的相对位置时,可以将后轮碾压膨胀缝100产生的震动作为第三次震动, 基于第三次震动进行分辨,当基于第三次或者第四次,或者四五次震动仍 然无法分辨时,将乘客甲与乘客乙均作为驾驶员处理。
98.本发明实施例1中以路面凸起为减速带为例,减速带一般为凸起结构, 其对车辆200产生冲击的原理与膨胀缝100类似,本发明实施例在此不再 进行赘述。
99.s104:根据乘客在车辆200中的位置,判断该乘客是否为驾驶员;若 是,向运营商端发出该乘客正在作为驾驶员驾驶车辆200的信息,以使运 营商端监听针对驾驶员的来电呼叫,拦截所述来电呼叫。
100.在中国境内注册的车辆200基本上都为左舵车,因此,相对位置处于 左前的乘客为驾驶员,因此,基于s101步骤的判定,可以确定出左前位 的乘客甲为驾驶员。
101.车载终端将乘客甲作为驾驶员正在驾驶车辆200的信息发送至运营商, 运营商收到该消息之后,根据驾驶员姓名筛选出对应的手机号码,然后实 时监听针对该手机号码的来电信息,并将来电信息拦截。
102.进一步的,由于国内重名的很多,根据姓名进行筛选很容易筛选出多 个手机号码,例如:
103.姓名:甲,号码1xxxxx;定位-1;
104.姓名:乙,号码2xxxxx;定位-2;
105.姓名:丙,号码3xxxxx;定位-3;
106.姓名:甲,号码4xxxxx;定位-4;
107.姓名:甲,号码5xxxxx;定位-5;
108.……
109.因此,本发明实施例增加了以下步骤:
110.获取车载终端在当前时刻的定位信息,以所述定位信息对应的坐标为 中心,以预设距离为半径,获取对应圆周范围内的所有手机号码以及对应 的机主姓名,在实际应用中,预设距离通常取值为基站三角定位的误差距 离,可以为200m、500m、1000m中的一种。
111.在本发明实施例中,车载终端将车辆200当前时刻的定位信息作为附 带信息与乘客甲作为驾驶员正在驾驶车辆200的信息一并发送至运营商, 运营向先根据车辆200当前时刻的定位信息获取以该定位点为中心设定范 围内的所有手机号,以及对应的机主姓名,结果如下:
112.姓名:甲,号码1xxxxx;定位-1;
113.姓名:乙,号码2xxxxx;定位-1;
114.姓名:丙,号码3xxxxx;定位-1;
115.……
116.然后将获取的机主姓名与驾驶员甲的姓名进行比较,进而得出驾驶员 甲的手机号码,将该号码作为目标号码,然后对目标号码实现监听。
117.更进一步的,在极端情况下,以该定位点为中心预设距离内与驾驶员 甲重名的可能有一个以上,这样就无法准确获取目标号码。为了解决上述 问题,本发明实施例中,增加了以下步骤:
118.车载终端将车辆200当前时刻的定位信息作为附带信息与乘客甲作为 驾驶员正在驾驶车辆200的信息一并发送至运营商,运营向先根据车辆 200当前时刻的当前定位信息获取以该定位点为中心设定范围内的所有手 机号,以及对应的机主姓名,将所有手机号码以及对应的机主姓名加入到 第一集合中,结果如下:
119.姓名:甲,号码1xxxxx;定位-1;
120.姓名:乙,号码2xxxxx;定位-1;
121.姓名:丙,号码3xxxxx;定位-1;
122.……
123.然后将获取的机主姓名与驾驶员甲的姓名进行比较,进而得出所有机 主姓名为甲的手机号码,将所有姓名为甲的手机号码的来电信息拦截;
124.在下一时刻时,接收下一时刻对应的下一定位信息,然后获取以该定 位点为中心设定范围内的所有手机号,以及对应的机主姓名,将所有手机 号码以及对应的机主姓名加入到第二集合中;
125.将当前次定位信息对应的姓名为甲的机主姓名的第一集合与下一次定 位信息对应的姓名为甲的机主姓名的第二集合作交集运算,得到目标号码, 拦截目标号码的来电信息,解除对其他与目标号码机主同名的手机号码来 电信息的拦截。
126.实施例2
127.在本发明实施例1的进一步改进方式中:可以识别出车辆的车轮碾压 目标异常结构的顺序次序,其中,所述目标异常结构包括:路面凸起以及 路面凹陷中的一种或组合;
128.具体的,可以利用行车记录仪的拍摄画面识别出目标异常结构,然后 基于车载摄像头拍摄范围内物体的先验尺度特征,计算出目标道路异常结 构的结构特征数据,其中,所述结构特征数据包括:横向尺度、纵向尺度、 高度、分布区域中的一种或组合。例如,当识
别出行车记录仪拍摄的画面 中包括了一条桥梁的膨胀缝100时,利用拍摄画面中包含的车道宽度、道 路标线宽度、车辆200高度以及行人高度等已知数据等比例换算出桥梁膨 胀缝100上各点相对于车辆200的距离、以及其与道路中心线之间的夹角。 当行车记录仪拍摄的画面中出现了不规则的膨胀缝100时,利用拍摄画面 中包含的已知数据,计算出膨胀缝100的横向尺度、纵向尺度,深度;当 行车记录仪拍摄的画面中出现了减速带时,利用拍摄画面中包含的已知数 据,计算出减速带上各点相对于车辆200的距离、以及其与道路中心线之 间的夹角。然后,可以根据车辆200的方向盘角度以及车速积分出车辆 200在当前时刻时的运动轨迹,再根据车辆200在当前时刻的角度数据对 车辆200的未来轨迹进行预测,得到延伸轨迹。该轨迹通常是已车辆200 中心点为基点积分出来的,而车轮位于车辆200两侧,且左右轮之间具有 较大的轮距,因此,将延伸轨迹向两侧平移,并结合时间数据,进而可以 得到车辆200的各个车轮对应的预测轨迹。结合车辆的前进方向和车辆四 个车轮的分布方式,即可确定出各个车轮的预测轨迹与目标异常结构接触 的先后顺序。
129.如图2所示,在膨胀缝100与车道延伸方向存在夹角的情况下,车辆 的车轮碾压膨胀缝的顺序为:右前轮、左前轮、右后轮、左后轮。
130.此时,在右前轮首先碾压到目标异常结构时,根据识别出的车辆右前 轮碾压到目标异常结构,当识别出乘客乙的终端的震动为各个车轮对应的 震动的最大值,即可确定乘客乙位于右前位;乘客甲或者乘客丁位于左前 位,乘客丙位于左后座。
131.类似的,可以基于第二次震动确定出乘客甲位于左前位。
132.应用本发明实施2,系统预先判读出车辆各个车轮碾压目标异常结构 的顺序,进而与对应乘客感知的震动的幅值相互验证,一方面可以提高基 于幅值与时间戳进行乘客位置识别的准确程度,另一方面,即使各个车轮 的幅值之间差异不大时,仍可以准确识别出对应的乘客位置。
133.实施例3
134.基于实施例1-实施例2,实施例3提供了一种驾驶员识别策略选择方 法,应用于运营商端,所述方法包括:
135.接收如实施例1或实施例2任一项所述的该乘客正在座位驾驶员驾驶 车辆200的信息;
136.监听针对驾驶员的来电呼叫,拦截所述来电呼叫。
137.在本发明实施例的一种具体实施方式中,在监听针对驾驶员的来电呼 叫的步骤之前,所述方法还包括:
138.获取车载终端在当前时刻的定位信息,以所述定位信息对应的坐标为 中心,以预设距离为半径,获取对应圆周范围内的所有手机号码以及对应 的机主姓名;
139.将机主姓名与驾驶员的姓名进行比对,得到与驾驶员的姓名对应的目 标号码;
140.所述监听针对驾驶员的来电呼叫,包括:
141.监听发现目标手机号的来电呼叫。
142.在本发明实施例的一种具体实施方式中,所述方法还包括:
143.向来电方发出是否进行留言的语音提示,在收到来电方的确认信息的 情况下,接收来电方的语音消息,并在驾驶结束时向驾驶员播放;
144.或者,
145.在驾驶员结束驾驶时,将所述来电呼叫转换为来电提醒发送至驾驶员 手机。
146.实施例4
147.本发明实施例还提供了一种驾驶员识别策略选择装置,装置包括:
148.车载终端用于执行如实施例1或实施例2任一项所述的方法;
149.运营商端用于执行如实施例3所述的方法。
150.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照 前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解: 其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分 技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本 质脱离本发明各实施例技术方案的精神和范围。