1.本发明涉及磁悬浮列车技术领域,具体为一种基于机器视觉的中低速磁悬浮列车通过对悬浮间隙,过轨道间隙距离的检测实现磁浮列车过轨道接缝稳定控制的系统。
背景技术:
2.磁浮列车可以离开地面一定高度飞行,但是依然需要在地面上有可靠的支撑和导向系统即轨道。考虑到热胀冷缩以及施工误差,轨道间不可避免的存在轨缝。
3.目前中低速(时速小于200公里)磁悬浮列车间隙传感器采用较多的是电涡流式间隙传感器,它利用电涡流效应来实现气隙的无接触测量,控制悬浮间隙在8~12mm的工作范围。该种传感器在检测线圈中通过交变电流时,会产生交变磁场,使金属被测体内部感应出环状电流,该电流会产生交变磁场会影响检测线圈中的磁场,从而使传感器线圈的等效电感随着间隙的变化而变化。所以可以通过测量检测电路的电感值来获得悬浮间隙的值。
4.电涡流传感器虽然应用广泛,但存在有一定的缺点与不足,其测量结果受被测物体表面加工状况和被测物体材料的影响,而且传感器工作环境存在电磁干扰问题,实际应用时需要针对测量环境进行校准,在使用时若不对其进行非线性校正则不能正常工作。此外,悬浮间隙传感器的工作环境温度变化较大,电涡流传感器的测量精度受温度影响很大,温度漂移影响了传感器的输出特性使其非线性度变大甚至不能正常工作。而且在通过轨缝时,金属被测体相当于在无穷远处,此时电涡流传感器测出的悬浮间隙为最大悬浮间隙,若用此悬浮间隙会导致悬浮系统稳定性变差甚至导致悬浮系统失稳。
5.传统的磁浮列车系统主要包括电磁铁、悬浮车、间隙传感器、悬浮控制电路以及斩波器等部分。磁浮列车系统是一个闭环控制系统,一般由间隙传感器检测钢轨与电磁铁之间的距离变化,当悬浮间隙增大,钢轨与电磁铁距离增大,间隙传感器输出电压发生变化,然后间隙电压信号发送到悬浮控制器处理,再经过斩波器调节电磁铁电流,使得电磁铁电流增大,电磁吸力增大,悬浮车被吸回平衡位置,反之同理,故能使悬浮车在平衡位置悬浮。但是车辆经过轨道接缝时,仅仅依靠电涡流传感器无法获得准确的悬浮间隙,故经过轨道接缝时会出现扰动。
技术实现要素:
6.针对现有的悬浮间隙测量技术所存在的不足,本发明的目的是提供一种基于图像处理的中低速磁悬浮列车过轨道接缝控制系统,旨在解决现有的磁悬浮列车间隙传感器在车辆过轨道接缝时无法检测悬浮间隙以及抗干扰能力弱、安装工艺复杂、成本过高、需进行非线性校正等问题,同时实现单个检测装置同时检测悬浮间隙,轨道间隙,电磁铁过轨缝距离的功能。通过以上参数的检测以显著提升悬浮系统的悬浮性能,增大系统的动态刚度,提高系统的抗干扰能力和系统的悬浮稳定性。
7.本发明的目的是这样实现的:一种基于图像处理的中低速磁悬浮列车过轨道接缝控制系统,包括图像采集模
块,图像处理模块,间隙计算模块,悬浮控制模块,悬浮斩波器,电流传感器,磁浮列车,电磁铁;所述图像采集模块包括安装在磁浮列车上的双目相机,用于采集悬浮间隙图像和轨道图像并将其传送至图像处理模块;所述图像处理模块与所述图像采集模块相连,用于接收传送的悬浮间隙图像和轨道图像,并将处理后的图像传送至所述间隙计算模块;所述间隙计算模块与所述图像处理模块相连,用于通过图像计算悬浮间隙值d和电磁铁过轨道接缝距离l,并将其传送至悬浮控制模块;所述悬浮控制模块与间隙计算模块相连,用于将收到的悬浮间隙和目标悬浮间隙进行比较,通过pid调节得出无轨缝时电流值;通过电磁铁过轨道接缝距离l和悬浮间隙对无轨缝时电流值进行过缝校正,最后与电磁铁当前电流值进行比较得出电流偏差,通过该偏差改变悬浮斩波器占空比以此改变悬浮电磁铁电流:当电流偏差值ei变大时,增大pwm波的占空比,使输出电流变大,当电流偏差值ei变小时,减小pwm波的占空比,使输出电流变小,完成稳定悬浮控制;所述电流传感器与电磁铁相连,将电磁铁电流值传送至悬浮控制模块;所述悬浮斩波器与悬浮控制模块相连,收到悬浮控制模块的占空比以调节电磁铁电流;所述磁浮列车为悬浮主体,被电磁铁控制稳定悬浮。
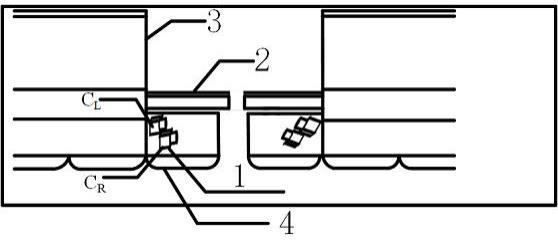
8.所述图像采集模块的双目相机由安装在磁浮列车左侧和右侧的两个高速工业相机c
l
和cr组成,每个悬浮点的悬浮间隙图像和轨道图像由两个高速工业相机采集,两个高速工业相机安装在悬浮点外侧能观察到悬浮间隙和轨道的位置,高速工业相机的光轴与水平面平行,与该侧悬浮架上悬浮电磁铁的侧边沿呈固定夹角θ,即每个高速工业相机能够同时拍摄到本侧的悬浮间隙图像以及轨道图像;经过双目标定的高速工业相机c
l
和cr同时拍摄电磁铁上边缘到轨道下边缘的悬浮间隙图像以及轨道图像,将各自采集到的图像分别传送给图像处理模块。
9.图像处理模块:对接收的悬浮间隙图像和轨道图像进行处理,图像处理包括双目图像校正,关键区域识别、灰度化、滤波、二值化、边缘提取过程;图像处理模块将处理后的图像传输至间隙计算模块;间隙计算模块:根据图像处理模块处理后的图像计算出悬浮间隙值d,以及电磁铁过轨道接缝距离l。
10.所述悬浮控制模块包括悬浮间隙变化量计算单元,无轨缝时电流值计算单元,反馈增益值调整单元以及电流偏差计算单元;悬浮间隙值d变化量计算单元:根据间隙计算模块实时发送的悬浮间隙值d和目标悬浮间隙值,得到悬浮间隙值d的变化量δx(t);无轨缝时电流值计算单元:计算无轨缝时电流值其中kp、kv、ka分别为比例环节、微分环节和积分环节的反馈增益,根据系统稳定性需求,调整所述反馈增益值的大小;
δv(t)为悬浮间隙值d变化量的一阶微分δx’(t),δa(t)为悬浮间隙值d变化量的一阶积分,电流偏差计算单元:电流偏差;其中,f(d),f(l)分别为悬浮间隙值d和电磁铁过轨道接缝距离l的函数,i(t)为无轨缝时电流值即没有轨缝时列车稳定悬浮需要的电流,l为电磁铁过轨道接缝距离,为校正后无轨缝时电流值,i0为电磁铁当前电流值,所述反馈增益值调整单元:通过比例环节的反馈增益kp来提高系统响应速度并减小偏差;当因比例环节的反馈增益kp过大,产生过大的超调、振荡或系统失稳时,则适当回调,以减小比例环节的反馈增益kp;通过微分环节的反馈增益kv来改善系统的动态特性,减小超调量;当因微分环节的反馈增益kv过大,导致系统阻尼过大使系统的调节速度过慢或系统失稳时,则适当回调以减小微分环节的反馈增益kv;当因积分环节的反馈增益ka过大,引起干扰变大,系统不稳定时,则适当回调以积分环节的反馈增益ka。
11.所述图像处理模块:6.1 通过双目标定得出两个高速工业相机的内参焦距与相对位置信息即高速工业相机之间的旋转平移矩阵,使用高速工业相机内参焦距和旋转平移矩阵完成图片校正;6.2在校正图像中截取包含悬浮间隙的关键区域,并采用加权平均法对其进行灰度化,获得关键区域的灰度图像;图像的灰度值为gray(i,j),i、j为任意点坐标值,则
ꢀꢀ
gray(i,j)=0.299*r(i,j)+0.578*g(i,j)+0.114*b(i,j);r(i,j),g(i,j),b(i,j)分别为图像的红绿蓝三个通道的像素灰度值;6.3将图像从空间域转换至频域对原始不清晰图像频域成分进行处理,利用直方图进行图像修正,使灰度间距被拉大,增大反差,实现图像增强;采用双边滤波算法对灰度图像进行滤波,去除图像中的噪声,并保存图像边缘信息;6.4采用最大熵阈值法选取合适的灰度阈值th,对图像进行二值化处理,划分轨道缝隙与背景区域,当灰度值大于th时,灰度值变为255,当灰度值小于th时,灰度值变为0;6.5对二值化后的图像进行边缘提取,采用canny算子识别二值化图像中的边界;6.6将图像传送至间隙计算模块。
12.所述间隙计算模块:7.1 在校正后的图像中建立平面直角坐标系,获取轨道下边缘前点b和后点a,电磁铁上边缘前点c和后点d,列车实际运行中轨道下边缘前点b和后点a分别对应在电磁铁上
的正投影点b'和a',以及电磁铁上边缘前点c和后点d在轨道上的正投影点c'和d'分别在图像坐标系中坐标点a(xa,ya),b(xb,yb),c (xc,yc),d (xd,yd),a'(x
a' ,y
a'
),b'(x
b'
,y
b'
),c'(x
c' ,y
c'
), d'(x
d' ,y
d'
);7.2通过双目视觉原理将图像坐标系坐标转化为真实世界坐标系的坐标为 a(xa,ya,za),b(xb,yb,zb),c(xc,yc,zc),d(xd,yd,zd),a'(x
a'
,y
a'
,z
a'
),b'(x
b'
,y
b'
,z
b'
),c'(x
c'
,y
c'
,z
c'
),d'(x
d'
,y
d'
,z
d'
);7.3 计算出电磁铁过轨道接缝距离l以及悬浮间隙值d,电磁铁宽度lm与现有技术相比,本发明的有益效果是:计算机视觉测量技术利用图像对客观世界里的三维目标物体进行感知和检测,其中包括待测目标的位置、姿态、形状、尺寸等几何信息。计算机视觉测量技术,只要合理的进行硬件选择和算法设计,可以达到较高的检测精度。双目立体视觉是基于视差,由三角法原理进行三维信息的获取,即由两个摄像机的图像平面或单摄像机在不同位置的图像平面和被测物体之间构成一个三角形。已知两摄像机之间的位置关系,便可以获取两摄像机公共视场内物体的三维尺寸及空间物体特征点的三维坐标。
13.在磁浮列车过轨道接缝时因为缝上磁阻变大导致磁力变小和电涡流传感器过缝时悬浮间隙检测不准影响悬浮稳定性和舒适性,通过机器视觉检测电磁铁过轨道接缝距离l加大电磁铁电流,满足稳定悬浮需求。
14.本发明加入了过缝调节环节,并对悬浮控制方法的改进,使得悬浮系统的悬浮性能有了显著的提升,增大了系统的动态刚度,提高系统的抗干扰能力,系统的悬浮稳定性显著提高,增大悬浮系统的稳定范围。
附图说明
15.图1是双目相机安装示意图。
16.图2是悬浮间隙数据传递框图。
17.图3是悬浮间隙值d及电磁铁过轨道接缝距离l计算示意图。
18.图4是本发明控制系统原理图。
19.图5是本发明悬浮控制模块内部处理流程图。
20.图中:1是高速工业相机,2是轨道,3是(磁浮列车)悬浮架,4是电磁铁。
具体实施方式
21.下面结合附图和具体实施例对本发明做进一步详细说明。
22.图4示出,一种基于图像处理的中低速磁悬浮列车过轨道接缝控制系统,包括图像采集模块,图像处理模块,间隙计算模块,悬浮控制模块,悬浮斩波器,电流传感器,磁浮列车,电磁铁;所述图像采集模块包括安装在磁浮列车上的双目相机,用于采集悬浮间隙图像和轨道图像并将其传送至图像处理模块;所述图像处理模块与所述图像采集模块相连,用于接收传送的悬浮间隙图像和轨道图像,并将处理后的图像传送至所述间隙计算模块;所述间隙计算模块与所述图像处理模块相连,用于通过图像计算悬浮间隙值d和电磁铁过轨道接缝距离l,并将其传送至悬浮控制模块;所述悬浮控制模块与间隙计算模块相连,用于将收到的悬浮间隙值d与目标悬浮间隙进行比较,通过pid调节得出无轨缝时电流值;通过电磁铁过轨道接缝距离l和悬浮间隙对无轨缝时电流值进行过缝校正,最后与电磁铁当前电流值进行比较得出电流偏差,通过该偏差改变悬浮斩波器占空比以此改变悬浮电磁铁电流:当电流偏差值ei变大时,增大pwm波的占空比,使输出电流变大,当电流偏差值ei变小时,减小pwm波的占空比,使输出电流变小,完成稳定悬浮控制;所述电流传感器与电磁铁相连,将电磁铁电流值传送至悬浮控制模块;所述悬浮斩波器与悬浮控制模块相连,收到悬浮控制模块的占空比以调节电磁铁电流;所述磁浮列车为悬浮主体,被电磁铁控制稳定悬浮。
23.如图1所示,本发明的每个悬浮点的悬浮间隙图像和轨道图像由两个高速工业相机1采集,两个高速工业相机安装在悬浮点外侧能观察到悬浮间隙和轨道2的位置,高速工业相机的光轴与水平面平行,与该侧悬浮架3上悬浮电磁铁4的侧边沿呈固定夹角θ,即每个高速工业相机能够同时拍摄到本侧的悬浮间隙图像以及轨道图像。悬浮间隙数据处理过程如图2所示,本发明的间隙检测方法为:通过双目标定的高速工业相机同时拍摄电磁铁上边缘到轨道下边缘的悬浮间隙图像,以及轨道图像。将各自采集到的图像分别传送给图像处理模块,图像处理模块包括以下步骤;6.1 通过双目标定得出两个高速工业相机的内参焦距与相对位置信息即高速工业相机之间的旋转平移矩阵,使用高速工业相机内参和旋转平移矩阵完成图片校正。
24.6.2在校正图像中截取包含悬浮间隙的关键区域,并采用加权平均法对其进行灰度化,获得关键区域的灰度图像;图像的灰度值为gray(i,j),i、j为任意点坐标值,则gray(i,j)=0.299*r(i,j)+0.578*g(i,j)+0.114*b(i,j);r(i,j),g(i,j),b(i,j)分别为图像的红绿蓝三个通道的像素灰度值;6.3将图像从空间域转换至频域对原始不清晰图像频域成分进行处理,利用直方图进行图像修正,使灰度间距被拉大,增大反差,实现图像增强;采用双边滤波算法对灰度图像进行滤波,去除图像中的噪声,并保存图像边缘信息;6.4采用最大熵阈值法选取合适的灰度阈值th,对图像进行二值化处理,划分轨道缝隙与背景区域,当灰度值大于th时,灰度值变为255,当灰度值小于th时,灰度值变为0;6.5对二值化后的图像进行边缘提取,采用canny算子识别二值化图像中的边界;6.6将图像传送至间隙计算模块。
25.计算实际间隙值及电磁铁过轨道接缝距离l,处理过程如图3所示,包括以下步骤:7.1 在校正后的图像中建立平面直角坐标系,获取轨道下边缘前点b和后点a,电磁铁上边缘前点c和后点d,列车实际运行中轨道下边缘前点b和后点a分别对应在电磁铁上的正投影点b'和a',以及电磁铁上边缘前点c和后点d在轨道上的正投影点c'和d'分别在图像坐标系中坐标点a(xa,ya),b(xb,yb),c (xc,yc), d (xd,yd),a'(x
a' ,y
a'
),b'(x
b'
,y
b'
),c'(x
c' ,y
c'
),d'(x
d' ,y
d'
);7.2通过双目视觉原理将图像坐标系坐标转化为真实世界坐标系的坐标为a(xa,ya,za),b(xb,yb,zb),c(xc,yc,zc),d(xd,yd,zd),a'(x
a'
,y
a'
,z
a'
),b'(x
b'
,y
b'
,z
b'
),c'(x
c'
,y
c'
,z
c'
), d'(x
d'
,y
d'
,z
d'
);7.3 计算出电磁铁过轨道接缝距离l以及悬浮间隙值d,电磁铁宽度lm本发明悬浮列车过轨缝控制包括以下步骤(如图4,图5所示):步骤1:根据间隙计算模块实时发送的悬浮间隙值d,得到悬浮间隙值d的变化量δx(t)步骤2:计算悬浮间隙值d变化量的一阶微分δx’(t),记为δv(t)步骤3:计算悬浮间隙值d变化量的一阶积分,记为δa(t)步骤4:计算无轨缝时维持系统稳定需要输出的电流其中kp、kv、ka分别为反馈增益,根据系统稳定性需求,调整所述反馈增益值的大小;步骤5:接收电磁铁电流i0;步骤6:过缝调节环节为,电流偏差为。f(d),f(l)分别为悬浮间隙值d和电磁铁过轨道接缝距离l的函数。
26.步骤7:控制器通过电流偏差改变输出pwm波的占空比控制电磁铁电流,当差值ei变大时,增大pwm波的占空比,使输出电流变大,当差值ei变小时,减小pwm波的占空比,使输出电流变小,完成稳定悬浮控制。
27.当电磁铁过轨道接缝距离l变大时,f(l)增大,以弥补因轨道缺失而损失的悬浮力,当悬浮间隙值d变大时,磁力线在轨缝处的损失相对减小,故以分段函数形式描述损失的悬浮力。
28.所述反馈增益值调整单元:通过比例环节的反馈增益kp来提高系统响应速度并减小偏差;当因比例环节的反馈增益kp过大,产生过大的超调、振荡或系统失稳时,则适当回调,以减小比例环节的反馈增益kp;通过微分环节的反馈增益kv来改善系统的动态特性,减小超调量;当因微分环节的反馈增益kv过大,导致系统阻尼过大使系统的调节速度过慢或系统失稳时,则适当回调以减小微分环节的反馈增益kv;当因积分环节的反馈增益ka过大,引起干扰变大,系统不稳定时,则适当回调以积分环节的反馈增益ka。