1.本发明涉及车辆转向控制技术领域,尤其涉及一种电驱动全地形车应急转向的控制系统及方法。
背景技术:
2.目前我国所使用的电驱动车辆通常轨迹转向方式,车辆转向时,方向盘带动转向拉杆,从而带动前轮实现偏转实现转向。在有大部分差速转向的全地形车中,采用液压双流转向或者制动转向的方式。
3.但用于电驱动差速转向的全地形车,行驶转向时是通过控制左右两边驱动电机的输出不同扭矩来实现,但若整车遇到高压电异常断电,驱动电机不能输出扭矩,整车便失去动力及转向能力。存在极高的安全风险。
技术实现要素:
4.本发明的目的在于提供一种电驱动全地形车应急转向的控制系统及方法,旨在解决驱动电机在高压电异常断电的情况下无法输出扭矩,导致整车失去动力及转向能力的问题。
5.为实现上述目的,第一方面,本发明提供了一种电驱动全地形车应急转向的控制系统,包括应急子系统和制动子系统;
6.所述应急子系统包括采集模块、整车控制器、电子液压制动模块、液压阀继电器和液压分配阀,所述整车控制器与所述采集模块连接,所述电子液压制动模块与所述整车控制器连接,所述液压阀继电器与所述整车控制器连接,所述液压分配阀与所述电子液压制动模块和所述液压阀继电器连接;
7.所述制动子系统包括左制动组件和右制动组件,所述左制动组件与所述液压分配阀连接,所述右制动组件与所述液压分配阀连接。
8.其中,所述采集模块包括转向单元、横摆角速度单元、车速单元和驱动力矩单元,所述转向单元与所述整车控制器连接,所述横摆角速度单元与所述整车控制器连接,所述车速单元与所述整车控制器连接,所述驱动力矩单元与所述整车控制器连接。
9.其中,所述液压分配阀包括左电磁阀和右电磁阀,所述左电磁阀与所述电子液压制动模块和所述液压阀继电器连接,所述左制动组件与所述左电磁阀连接,所述右电磁阀与所述电子液压制动模块和所述液压阀继电器连接,所述右制动组件与所述右电磁阀连接。
10.其中,所述液压阀继电器包括左继电器和右继电器,所述左继电器与所述整车控制器连接,所述左电磁阀与所述左继电器连接,所述右继电器与所述整车控制器连接,所述右电磁阀与所述右继电器连接。
11.其中,所述左制动组件包括电机、减速器和制动钳,所述减速器与所述电机输出端固定连接,所述制动钳与所述减速器固定连接,并位于远离所述电机的一侧。
12.其中,所述电机包括电机本体和电机控制器,所述电机本体与所述减速器固定连接,并位于远离所述制动钳的一侧,所述电机控制器与所述电机本体电连接,所述电机控制器与所述整车控制器连接。
13.第二方面,本发明提供了一种电驱动全地形车应急转向的控制方法,包括:
14.对整车进行检测,得到检测信号;
15.基于所述检测信号判断整车的动力电池和电机是否故障,若故障,进行下一步,若正常则退出;
16.进入故障后,基于所述检测信号,控制左电磁阀和后电磁阀的通断。
17.基于所述检测信号通过期望左右电机驱动力矩,计算并转换出期望的制动压力值;
18.将所述制动压力值下发至电子液压制动模块;
19.电子液压制动模块基于所述制动压力值对制动子系统进行制动。
20.本发明的一种电驱动全地形车应急转向的控制系统,通过所述采集模块对整车的行驶状态进行采集,采集内容包括整车的转向角度、横摆角速度、车速和驱动力矩,所述整车控制器基于上述采集信息驱动所述液压阀继电器控制所述液压分配阀的接通和断开情况,使得所述电子液压制动模块将制动压力经所述液压分配阀下发给所述制动子系统,所述制动子系统对整车进行制动转向,解决了驱动电机在高压电异常断电的情况下无法输出扭矩,导致整车失去动力及转向能力的问题。
附图说明
21.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
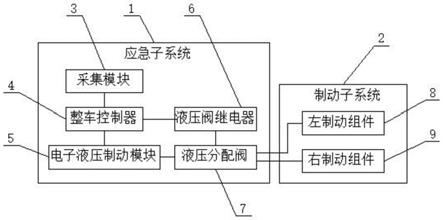
22.图1是本发明提供的一种电驱动全地形车应急转向的控制系统的结构示意图。
23.图2是采集模块和整车控制器的结构示意图。
24.图3是整车控制器、液压阀继电器、液压分配阀和制动系统的结构示意图。
25.图4是左制动组件的结构示意图。
26.图5是整车控制器、电机和减速器的结构示意图。
27.图6是本发明提供的一种电驱动全地形车应急转向的控制的流程图。
28.附图标记:1-应急子系统、2-制动子系统、3-采集模块、4-整车控制器、5-电子液压制动模块、6-液压阀继电器、7-液压分配阀、8-左制动组件、9-右制动组件、10-转向单元、11-横摆角速度单元、12-车速单元、13-驱动力矩单元、14-左电磁阀、15-右电磁阀、16-左继电器、17-右继电器、18-电机、19-减速器、20-制动钳、21-电机本体、22-电机控制器。
具体实施方式
29.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
30.在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
31.请参阅图1至图5,第一方面,本发明提供一种电驱动全地形车应急转向的控制系统,包括应急子系统1和制动子系统2;
32.所述应急子系统1包括采集模块3、整车控制器4、电子液压制动模块5、液压阀继电器6和液压分配阀7,所述整车控制器4与所述采集模块3连接,所述电子液压制动模块5与所述整车控制器4连接,所述液压阀继电器6与所述整车控制器4连接,所述液压分配阀7与所述电子液压制动模块5和所述液压阀继电器6连接;
33.所述制动子系统2包括左制动组件8和右制动组件9,所述左制动组件8与所述液压分配阀7连接,所述右制动组件9与所述液压分配阀7连接。
34.在本实施方式中,通过所述采集模块3对整车的行驶状态进行采集,采集内容包括整车的转向角度、横摆角速度、车速和驱动力矩,所述整车控制器4基于上述采集信息驱动所述液压阀继电器6控制所述液压分配阀7的接通和断开情况,使得所述电子液压制动模块5将制动压力经所述液压分配阀7下发给所述制动子系统2的所述左制动组件8或所述右制动组件9对所述整车进行制动转向,在所述左制动组件8承受制动压力时所述整车右转,在所述右制动组件9承受制动压力时,所述整车左转,解决了驱动电机在高压电异常断电的情况下无法输出扭矩,导致整车失去动力及转向能力的问题。
35.进一步的,所述采集模块3包括转向单元10、横摆角速度单元11、车速单元12和驱动力矩单元13,所述转向单元10与所述整车控制器4连接,所述横摆角速度单元11与所述整车控制器4连接,所述车速单元12与所述整车控制器4连接,所述驱动力矩单元13与所述整车控制器4连接;所述液压分配阀7包括左电磁阀14和右电磁阀15,所述左电磁阀14与所述电子液压制动模块5和所述液压阀继电器6连接,所述左制动组件8与所述左电磁阀14连接,所述右电磁阀15与所述电子液压制动模块5和所述液压阀继电器6连接,所述右制动组件9与所述右电磁阀15连接;所述液压阀继电器6包括左继电器16和右继电器17,所述左继电器16与所述整车控制器4连接,所述左电磁阀14与所述左继电器16连接,所述右继电器17与所述整车控制器4连接,所述右电磁阀15与所述右继电器17连接。
36.在本实施方式中,所述采集模块3的所述转向单元10采集所述整车的转向角度,所述横摆角速度单元11采集所述整车的横摆角速度,所述车速单元12采集所述整车的车速,所述驱动力矩单元13采集所述整车的驱动力矩。所述转向单元10、所述横摆角速度单元11、所述车速单元12和所述驱动力矩单元13均通过硬线或can线传递至所述整车控制器4,所述液压阀继电器6的所述左继电器16在所述整车控制器4的驱动下控制所述左电磁阀14的接通与断开,所述左电磁阀14接通时,所述电子液压制动模块5向所述左制动组件8下发制动压力,所述右继电器17在所述整车控制器4的驱动下控制所述右电磁阀15的接通与断开,所述右电磁阀15接通时,所述电子液压制动模块5箱所述右制动组件9下发制动压力。
37.进一步的,所述左制动组件8包括电机18、减速器19和制动钳20,所述减速器19与所述电机18输出端固定连接,所述制动钳20与所述减速器19固定连接,并位于远离所述电
机18的一侧;所述电机18包括电机本体21和电机控制器22,所述电机本体21与所述减速器19固定连接,并位于远离所述制动钳20的一侧,所述电机控制器22与所述电机本体21电连接,所述电机控制器22与所述整车控制器4连接。
38.在本实施方式中,所述右制动组件9与所述左制动组件8的结构相同,在制动时所述左制动组件8的所述减速器19减缓所述电机本体21的输出转动,所述制动钳20将所述减速器19上的转轴卡住,对转轴上的车轮进行制动,使得所述整车向所述右制动组件9方向转动,所述电机控制器22将所述电机本体21带动车体的行驶车速传输给所述整车控制器4。
39.请参阅图6,第二方面,本发明提供了一种电驱动全地形车应急转向的控制方法,包括:
40.s101、对整车进行检测,得到检测信号;
41.所述采集模块3的所述转向单元10采集所述整车的转向角度,所述横摆角速度单元11采集所述整车的横摆角速度,所述车速单元12采集所述整车的车速,所述驱动力矩单元13采集所述整车的驱动力矩。
42.s102、基于所述检测信号判断整车的动力电池和电机18是否故障,若故障,进行下一步,若正常则退出;
43.所述整车控制器4基于所述采集模块3的采集信息检测到整车是否出现一级或者二级故障,整车共设置5级故障,一级为动力电池故障,二级为驱动电机故障。当出现一级或二级故障,且车速大于5km/h时,启动液压阀继电器6、液压分配阀7和电子液压制动模块5。所述整车控制器4根据转向角度信号,控制所述液压阀继电器6控制所述左电磁阀14和所述右电磁阀15的接通与断开,如所述转向角度信号为右转信号,所述整车控制器4通过所述液压阀继电器6切断所述左电磁阀14,如所述转向角度信号为左转信号,所述整车控制器4通过所述液压阀继电器6切断所述右电磁阀15。
44.s103、基于所述检测信号通过期望左右驱动差速力矩,计算并转换出期望的制动压力值;
45.在所述电机控制器22通信状态正常的情况下,将所述电机本体21驱动所述整车的形势车速的信号传输给所述整车控制器4,所述整车控制器4根据车速信号通过期望左右驱动差速力矩,计算并转换出期望的制动压力值。期望的制动压力公式如下:
46.p
refmax
=(t
l-tr)
÷
2.63;
47.其中,t
l
为所述左制动组件8的所述电机本体21的期望力矩,tr为所述右制动组件9的所述电机本体21的期望力矩。
48.在所述电机控制器22通信故障时,无法根据车速信号计算驱动力矩,期望的制动压力公式如下:
49.p
ref
=-50
×
ω
ref
;
50.其中,ω
ref
为参考横摆角速度。
51.s104、将所述制动压力值下发至电子液压制动模块5;
52.期望的制动压力的最大值不能超过所述电子液压制动模块5限制值,取值为
±
50kpa。
53.s105、电子液压制动模块5基于所述制动压力值对制动子系统2进行制动。
54.所述电子液压制动模块5采集管路内的压力值,当所述管路内的压力小于阈值后,
所述电子液压制动模块5向所述制动子系统2下发制动压力进行制动。
55.本发明填补了电驱动全地形车应急转向的空白;提出电驱动全地形车应急转向的控制方法,能较好的实现应急转向的功能,同时能够提高整车行驶安全性。
56.以上所揭露的仅为本发明一种电驱动全地形车应急转向的控制系统及方法较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。