1.本实用新型涉及机器人底盘技术领域,特别是一种可自主转向的机器人底盘结构。
背景技术:
2.现有技术中的机器人悬挂底盘一般采用是4个万向轮和2个轮毂电机结构,这种结构虽然结构简单,但是底盘的承载力低,且只能适用于平整的室内环境,由于每个轮子没有单独悬挂,一旦走在不平整的路面,整个底盘的颠簸比较厉害,同时还会存在某个轮子悬空的现象,最终导致摔倒的风险。
3.现有技术的底盘机构在需要进行转向时,必须要将机器人停下来,然后通过协调两个轮毂电机的运动进而调整方向,方向调整好,后再次启动轮毂电机运动。这使机器人的运行效率降低,延长了运行时间。
技术实现要素:
4.本实用新型的目的是为了解决上述问题,设计了一种可自主转向的机器人底盘结构,包括安装板、转向驱动单元、转向轮组和悬挂单元,所述安装板上固定有转向驱动单元和悬挂单元,所述转向驱动单元与所述转向轮组转动连接,所述悬挂单元与所述转向轮组转动连接;所述转向驱动单元包括驱动装置、传动组件、导向组件和驱动连接板,所述驱动装置与所述传动组件固定连接,所述传动组件与所述导向组件通过驱动连接板固定连接以驱动所述驱动连接板沿导向组件移动。
5.进一步地,所述传动组件包括丝杆和螺母,所述驱动装置与所述丝杆固定连接,所述丝杆上螺纹连接有螺母,所述螺母固定连接有驱动连接板。
6.进一步地,所述导向组件包括直线导轨和滑块,所述直线导轨上滑动连接有滑块,所述滑块与驱动连接板固定连接。
7.进一步地,所述滑块与所述驱动连接板之间固定有转向固定板,所述转向固定板两端转动连接有转向连杆,所述转向连杆与所述转向轮转动连接。
8.进一步地,所述悬挂单元包括悬挂连接架和减震器,所述悬挂连接架两侧转动连接有连接杆,所述连接杆与所述转向轮组转动连接,所述减震器两端分别与所述悬挂连接架、所述连接杆转动连接。
9.进一步地,所述转向轮组包括转向轮、转向轴和轴件固定架,所述转向轮上穿设有转向轴,所述转向轴上转动设置有轴件固定架,所述轴件固定架与所述连接杆转动连接。
10.进一步地,所述减震器包括依次固定连接的第一连接件、导杆和第二连接件,所述导杆外设置有弹性件,所述第一连接件与所述悬挂连接架转动连接,所述第二连接件与所述连接杆转动连接。
11.利用本实用新型的技术方案制作的一种可自主转向的机器人底盘结构,所达到的有益效果:
12.(1)解决了转向轮与地面的硬接触问题,通过每个转向轮的独立悬挂单元,不仅保证了机器人底盘运动的平稳性,还解决了机器人在不平整路面上运动时有转向轮悬空的问题,大大增加了底盘的通过性;
13.(2)在使用时,可以保证机器人在运动中控制方向,无需停下来调整方向,大大提高了通行效率,且方向可以通过转向驱动单元进行精准控制,使运行更加平稳,准确。
附图说明
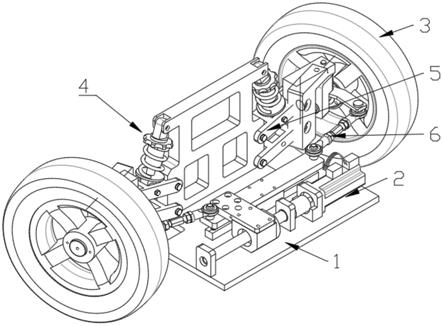
14.图1是本实用新型所述一种可自主转向的机器人底盘结构的立体图;
15.图2是本实用新型所述一种可自主转向的机器人底盘结构的主视图;
16.图3是本实用新型所述一种可自主转向的机器人底盘结构的俯视图;
17.图4是本实用新型所述转向驱动单元的结构示意图;
18.图5是本实用新型所述转向轮组的结构示意图;
19.图6是本实用新型所述悬挂单元的结构示意图;
20.图中,1、安装板;2、转向驱动单元;21、驱动装置;22、传动组件;221、丝杆;222、螺母;23、导向组件;231、直线导轨;232、滑块;233、转向固定板;24、驱动连接板;3、转向轮组;31、转向轮;32、转向轴;33、轴件固定架;4、悬挂单元;41、悬挂连接架;42、减震器;421、第一连接件;422、导杆;423、第二连接件;424、弹性件;5、连接杆;6、转向连杆。
具体实施方式
21.为了更好的理解本实用新型,下面结合具体实施例和附图对本实用新型进行进一步的描述,一种可自主转向的机器人底盘结构。如图1-3所示,包括安装板1、转向驱动单元2、转向轮组3和悬挂单元4,所述安装板1上固定有转向驱动单元2和悬挂单元4,所述转向驱动单元2与所述转向轮组3转动连接,所述悬挂单元4与所述转向轮组3转动连接;所述转向驱动单元2包括驱动装置21、传动组件22、导向组件23和驱动连接板24,所述驱动装置21与所述传动组件22固定连接,所述传动组件22与所述导向组件23通过驱动连接板24固定连接以驱动所述驱动连接板24沿导向组件23移动。安装板1将转向轮组3、悬挂单元4和转向驱动单元2连成一个整体,在执行转向动作时,转向驱动单元2带动转向轮组3实现转向,其中,驱动装置21为转向驱动单元2提供动力,可选择为电机,传动组件22和导向组件23相互配合将驱动连接板24发生移动,由于转向轮组3与驱动连接板24转动连接,在驱动连接板24发生移动时,转向轮组3发生位置的转动,进而实现转向。悬挂单元4设置有两组,分别独立的与每个转向轮31相连接,所以当转向轮31通过不平整路面时,通过独立悬挂的悬挂单元4保证每个转向轮31分别与地面贴合,平稳通过路面。
22.如图4-5所示,所述传动组件22包括丝杆221和螺母222,所述驱动装置21与所述丝杆221固定连接,所述丝杆221上螺纹连接有螺母222,所述螺母222固定连接有驱动连接板24。所述导向组件23包括直线导轨231和滑块232,所述直线导轨231上滑动连接有滑块232,所述滑块232与驱动连接板24固定连接。所述滑块232与所述驱动连接板24之间固定有转向固定板233,所述转向固定板233两端转动连接有转向连杆,所述转向连杆与所述转向轮31转动连接。所述转向轮组3包括转向轮31、转向轴32和轴件固定架33,所述转向轮31上穿设有转向轴32,所述转向轴32上转动设置有轴件固定架33,所述轴件固定架33与所述连接杆3
转动连接。转向轴32与转向轮31用紧固件锁紧为一体,轴件固定架33与转向连杆6活动连接,同时轴件固定架33将转向轮组3与悬挂单元4连接,形成一个完成的独立悬挂系统。在进行转向时,驱动装置21启动,与驱动装置21固定连接的丝杆221发生转动,与丝杆221螺纹连接的螺母222沿丝杠做直线运动,螺母222上固定的驱动连接板24与螺母222同步往复直线运动,由于驱动连接板24与滑块232固定连接,于是,驱动连接板24在滑块232与直线导轨231的导向作用下带动转向固定板233两端的转向连杆发生角度上的变化,转向连杆6连接着转向驱动单元2和转向轮组3,驱动连接板24和转向连杆6通过浮动结构连接,驱动连接板24的直线运动通过转向连杆6将转向驱动单元2的传动力传递给转向轮31,实现转向的目的。
23.如图6所示,所述悬挂单元4包括悬挂连接架41和减震器42,所述悬挂连接架41两侧转动连接有连接杆3,所述连接杆3与所述转向轮组3转动连接,所述减震器42两端分别与所述悬挂连接架41、所述连接杆3转动连接。悬挂连接架41是支撑独立的悬挂单元4和安装板1的主框架,悬挂连接架41两侧独立地各安装一组悬挂单元4,转向轮31、减震器42与连接杆3分别独立的悬挂于悬挂连接架41两端。可选的,减震器42为弹簧减震器42,所述减震器42包括依次固定连接的第一连接件421、导杆422和第二连接件423,所述导杆422外设置有弹性件424,所述第一连接件421与所述悬挂连接架41转动连接,所述第二连接件423与所述连接杆3转动连接。减震器42是一种可上下摆动的活动结构,依靠弹性件424的伸缩运动实现整个底盘的减震。导杆422为伸缩件,在机器人行进于崎岖不平的路面时,伸缩件不断的伸长或缩短,弹性件424配合导杆422的变化而不断拉伸或压缩,起到缓冲作用。可选的,弹性件424选择为弹簧。且每个转向轮31上均安装有独立的减震器42,互不干扰。
24.在使用时更加灵活,转向轮31可以用轮毂电机驱动,也可以使用惰轮,可以用在大底盘上,也可以用在小底盘上,整个机构的拓展性很强,同时悬挂的承载力也比普通的底盘悬挂结构更大。
25.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。