一种浮动式旋转多路分时配送装置
1.一、技术领域:
2.本实用新型涉及的是智能烹饪机器人的液体调料和固体粉末类调料的加注和投送装置,具体涉及的是一种浮动式旋转多路分时配送装置。
3.二、
背景技术:
4.烹饪机器人已出现在社会生活中,烹饪机器人能自动炒、煎、烹、炸、爆、焖、蒸、煮、烙、炖、煲等一锅多用的功能,轻松实现了炒菜过程的自动化和趣味化。现有的烹饪机器人炒菜时,一般还在人工投料,人工投料不方便。
5.三、
技术实现要素:
6.本实用新型的目的是提供一种浮动式旋转多路分时配送装置,这种浮动式旋转多路分时配送装置用于智能烹饪机器人的液体调料和固体粉末类调料的加注和投送。
7.本实用新型解决其技术问题所采用的技术方案是:这种浮动式旋转多路分时配送装置包括壳体、旋转分流体、上压板、上摩擦片、下摩擦片、电机驱动装置,旋转分流体环绕在单路进出料管外,旋转分流体沿径向设置水平分流孔,水平分流孔与单路进出料管相通,单路进出料管的下端为实心的;旋转分流体位于壳体内,且被上摩擦片和下摩擦片包围,上压板压在上摩擦片上,连接螺栓将上压板、上摩擦片、下摩擦片和壳体紧固在一起,上压板将壳体上端口封闭;单路进出料管上端裸露于上压板外,单路进出料管下端位于壳体底板的中心孔处,单路进出料管下端连接电机驱动装置;上压板和上摩擦片均沿周向设置多个一一对应的竖向分流孔,上压板的每个竖向分流孔处均设置多路进出料管;水平分流孔的孔壁上端也设置竖向分流孔,该竖向分流孔、上压板的竖向分流孔、上摩擦片的竖向分流孔与单路进出料管的距离相等,各竖向分流孔的直径相等。
8.上述方案中电机驱动装置包括电机、减速装置、位置检测装置,位置检测装置由与一个初始原点位置检测装置和a、b、z转速及转向检测装置组成,通过对初始原点的检测,既可实现旋转分流体初始位置定位,同时又可消除旋转分流体与上静摩擦片多路进出料口的对中累计误差。
9.上述方案中上压板沿周向设置六个竖向分流孔,上摩擦片沿周向设置六个竖向分流孔,上压板的六个竖向分流孔分别与上摩擦片的六个竖向分流孔一一对应,上压板的六个竖向分流孔处各设置一根多路进出料管;水平分流孔的孔壁上端设置一个竖向分流孔。
10.上述方案中单路进出料管与上压板间设置环形摩擦片,单路进出料管与壳体之间设置环形摩擦片,将单路进出料管与上压板之间、单路进出料管与壳体之间均进行密封。
11.有益效果:
12.1、本实用新型应用范围液涵盖体料液和固体粉末类的单进多分路配送,如用于智能烹饪机器人的液体调料和固体粉末类调料的加注和投送。
13.2、本实用新型实现多路进出料口与单路进出料口的分时接通,实现六进一出或六出一进。
14.3、本实用新型实现多路进出料口与单路进出料口的定时刻唯一接通,在每一接通时刻,只有一路多路进出料口与单路进出料口接通,其他均处于关闭状态。
15.4、本实用新型根据需要可实现多路进出料口与单路进出料口完全封闭隔离。
16.四、附图说明:
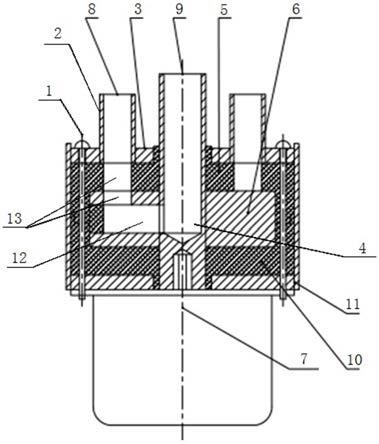
17.图1是本实用新型的主视图;
18.图2是本实用新型的俯视图。
19.1-连接螺栓、2-多路进出料管、3-上压板、4-单路进出料管、5-上摩擦片、6-旋转分流体、7-电机驱动装置、8-多路进出料口、9-单路进出料口、10-下摩擦片、11-壳体、 12-水平分流孔、 13-竖向分流孔。
20.五、具体实施方式:
21.下面结合附图对本实用新型做进一步的说明:
22.结合图1-图2所示,这种浮动式旋转多路分时配送装置包括壳体11、旋转分流体6、上压板3、上摩擦片5、下摩擦片10、电机驱动装置7,旋转分流体6环绕在单路进出料管4外,旋转分流体6沿径向设置水平分流孔12,水平分流孔12与单路进出料管4相通,单路进出料管4的下端为实心的;旋转分流体6位于壳体11内,且被上摩擦片5和下摩擦片10包围,上压板3压在上摩擦片5上,连接螺栓1将上压板3、上摩擦片5、下摩擦片10和壳体11紧固在一起,上压板3将壳体11上端口封闭;单路进出料管4上端裸露于上压板3外,单路进出料管4下端位于壳体11底板的中心孔处,单路进出料管4下端连接电机驱动装置7;上压板3和上摩擦片5均沿周向设置多个一一对应的竖向分流孔13,上压板3的每个竖向分流孔13处均设置多路进出料管2;水平分流孔12的孔壁上端也设置竖向分流孔13,该竖向分流孔、上压板的竖向分流孔、上摩擦片的竖向分流孔与单路进出料管4的距离相等,各竖向分流孔的直径相等。
23.本实施方式中上压板3沿周向设置六个竖向分流孔13,上摩擦片5沿周向设置六个竖向分流孔13,上压板的六个竖向分流孔分别与上摩擦片的六个竖向分流孔一一对应,上压板的六个竖向分流孔处各设置一根多路进出料管2,共6根多路进出料管2;水平分流孔12的孔壁上端设置一个竖向分流孔13。
24.单路进出料管4与上压板3间设置环形摩擦片,单路进出料管4与壳体11之间设置环形摩擦片,将单路进出料管4与上压板3之间、单路进出料管4与壳体11之间均进行密封。单路进出料管4上端口为单路进出料口9,多路进出料管2上端口为多路进出料口8。
25.电机驱动装置7包括电机、减速装置、位置检测装置,位置检测装置由与一个初始原点位置检测装置和a、b、z转速及转向检测装置组成,通过对初始原点的检测,既可实现旋转分流体初始位置定位,同时又可消除旋转分流体与上静摩擦片多路进出料口的对中累计误差。
26.本实用新型工作原理:
27.旋转分流体6包含在上摩擦片5和下摩擦片10中,上摩擦片5开有6个多路进出料口8(即竖向分流孔)和一个单路进出料口9(上摩擦片5通过此单路进出料口8包绕在单路进出料管外),上摩擦片5的6个多路进出料口(即竖向分流孔)位置与尺寸和6个多路进出料管的多路进出料口8完全一致,上摩擦片5的单路进出料口位置与尺寸和单路进出料管的单路进出料口完全一致;当旋转分流体6旋转到指定角度,旋转分流体6上开设的竖向分流孔13与上摩擦片5的多路进出料口8(即竖向分流孔)中的一个完全对接,实现流体从多路进出料口8的一路到单路进出料口9的流动,完成配送过程;旋转分流体6浮于上摩擦片5和上摩擦片10中,无需机械定位装置。
28.上压板3、上摩擦片5、旋转分流体6、下摩擦片10、壳体11、电机驱动装置7通过连接螺栓1连接,通过调节连接螺栓1的紧定力矩,调节上摩擦片5、旋转分流体6、下摩擦片10的压紧力,实现进出料口流道的密封性;同时通过连接螺栓1与壳体11的定位连接,实现上摩擦片5、下摩擦片10与壳体的位置固定以及与电机驱动装置7的定位连接。
29.上摩擦片5和下摩擦片10由密封材料制作而成。
30.进一步的,电机驱动装置7由位置检测装置、减速装置、电机等组成,其中位置检测装置由与一个初始原点位置检测装置和a、b、z转速及转向检测装置组成,通过对初始原点的检测,既可实现旋转分流体6初始位置定位,同时又可消除旋转分流体6与上摩擦片5多路进出料口的对中累计误差;旋转分流体6离开初始位置后,通过a、b、z计算电机的转速和转向,结合减速装置的速比,确定旋转分流体6的旋转角度,30度位封闭位置,60度位接通位置,依此类推,实现6个流道的分别配送。
31.本实用新型一套驱动装置实现多通道分次配送,360度范围内实现6次配送和6次封闭;分流体浮于上下摩擦片之间,摩擦力小,易于调节密封力矩;结构简单,运动零件少,故障率低,易于与电子技术结合,实现自动控制;旋转一周,进行一次原点校正,及时消除基础误差。