1.本实用新型涉及电子技术领域,尤其涉及一种自动冲奶控制电路、装置及系统。
背景技术:
2.目前,对于处于哺乳期的婴儿,越来越多的家庭采用奶粉喂养或者奶粉喂养与母乳喂养相结合的方式来喂养婴儿,但是在很多时候,需要冲泡奶粉喂养婴儿时,需要耗费较长的时间,如果只有一个人在家时,还需要一边冲奶粉,一边照顾婴儿,不仅使得大人分身乏术,而且不能很好地照顾婴儿,从而引起种种问题。
3.上述内容仅用于辅助理解本实用新型的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
4.本实用新型的主要目的在于提出一种自动冲奶控制电路、装置及系统,旨在解决现有技术中冲泡奶粉效率低的技术问题。
5.为实现上述目的,本实用新型提出一种自动冲奶控制电路,所述电路包括:单片机、多个电机控制电路、水泵控制电路、感应电路,所述单片机与所述多个电机控制电路连接,所述单片机与所述水泵控制电路连接,所述感应电路与所述单片机连接;
6.其中,所述感应电路,用于在检测到的信号满足预设条件时,发送转动电信号至单片机,并根据所述单片机反馈的转动控制信号将奶瓶移动至设定位置;
7.所述水泵控制电路,用于接收所述单片机输出的水泵控制信号,并根据所述水泵控制信号控制所述设定位置的水泵将水注入所述奶瓶;
8.所述电机控制电路,用于接收所述单片机输出的冲奶控制信号,并根据所述冲奶控制信号控制对应的冲奶电机带动所述奶瓶运动以完成冲奶。
9.可选地,所述所述感应电路包括:传感器和转动控制电路,所述传感器的输出端与所述单片机的输入端连接,所述转动电机控制电路与所述单片机连接;
10.其中,所述传感器,用于在检测到的信号满足预设条件时,发送转动电信号至所述单片机;
11.所述单片机,用于根据所述转动电信号生成转动控制信号,并将所述转动控制信号输出至所述转动控制电路;
12.所述转动控制电路,用于在接收到所述转动控制信号时,根据所述转动控制信号控制转动电机将奶瓶移动至设定位置。
13.可选地,所述电机控制电路包括:限流电阻、导通电阻、第一三极管、断电保护电路和冲奶电机;其中,
14.所述限流电阻的第一端与所述单片机的第一输出端连接,所述限流电阻的第二端与所述导通电阻的第一端连接,所述导通电阻的第一端还与所述第一三极管的基极连接,所述导通电阻的第二端接地,所述第一三极管的发射极与所述导通电阻的第二端连接,所
述第一三极管的集电极与所述断电保护电路的第一端连接,所述第一三极管的集电极还与所述冲奶电机的第一端连接,所述电机的第二端与所述断电保护电路的第二端连接,所述冲奶电机的第二端还与电源连接。
15.可选地,所述水泵控制电路包括:第一电阻、第二电阻、第二三极管、第二二极管和水泵;其中,
16.所述第一电阻的第一端与所述单片机连接,所述第一电阻的第二端与所述第二电阻的第一端连接,所述第二电阻的第一端还与所述第二三极管的基极连接,所述第二电阻的第二端与所述第二三极管的发射极连接,所述第二二极管的发射极接地,所述第二三极管的集电极与所述第二二极管的阳极连接,所述第二三极管的集电极还与所述水泵的第一端连接,所述第二二极管的阴极与所述水泵的第二端连接,所述水泵的第二端还与电源连接。
17.可选地,所述断电保护电路包括第一二极管,所述第一二极管的阳极与所述第一三极管的集电极连接,所述第一二极管的阴极与电源连接。
18.可选地,所述电机控制电路还包括:过流保护电路;其中,
19.所述过流保护电路,用于在所述电机故障导致流过所述电机电流大于预设电流阈值时,断开所述电机与电源连接。
20.可选地,所述过流保护电路包括:第三电阻、第四电阻、第三三极管、继电器和开关;其中,
21.所述第三电阻的第一端与所述第一三极管的集电极连接,所述第三电阻的第二端与所述冲奶电机的第一端连接,所述冲奶电机的第二端与所述开关的第一端连接,所述开关的第二端与电源连接,所述第四电阻的第一端与所述第三电阻的第二端连接,所述第四电阻的第二端与所述第三三极管的基极连接,所述第三三极管的发射极与所述第三电阻的第一端连接,所述第三三极管的集电极与所述继电器的第一端连接,所述继电器的第二端与所述开关的第二端连接。
22.为实现上述目的,本实用新型还提出一种自动冲奶控制装置,所述装置包括上文所述的自动冲奶控制电路。
23.为实现上述目的,本实用新型还提出一种自动冲奶控制系统,所述系统包括上文所述的自动冲奶控制电路。
24.本实用新型技术方案通过提出一种自动冲奶控制电路,所述电路包括:单片机、多个电机控制电路、水泵控制电路、感应电路,所述单片机与所述多个电机控制电路连接,所述单片机与所述水泵控制电路连接,所述感应电路与所述单片机连接;其中,所述感应电路,用于在检测到的信号满足预设条件时,发送转动电信号至单片机,并根据所述单片机反馈的转动控制信号将奶瓶移动至设定位置;所述水泵控制电路,用于接收所述单片机输出的水泵控制信号,并根据所述水泵控制信号控制所述设定位置的水泵将水注入所述奶瓶;所述电机控制电路,用于接收所述单片机输出的冲奶控制信号,并根据所述冲奶控制信号控制对应的冲奶电机带动所述奶瓶运动以完成冲奶;由于本实用新型是通过在感应电路检测到的信号满足预设条件时,发送转动电信号至单片机,并根据单片机反馈的转动控制信号将奶瓶移动至设定位置,在奶瓶移动到设定位置时,单片机输出水泵控制信号,水泵控制电路根据水泵控制信号控制设定位置的水泵将水注入奶瓶,在奶瓶注水完成时,单片机输
出冲奶控制信号,冲奶控制电路根据冲奶控制信号控制冲奶电机带动奶瓶运动以完成冲奶,解决了现有技术中在冲奶时需要人工操作的技术问题,提高了冲泡奶粉的效率。
附图说明
25.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
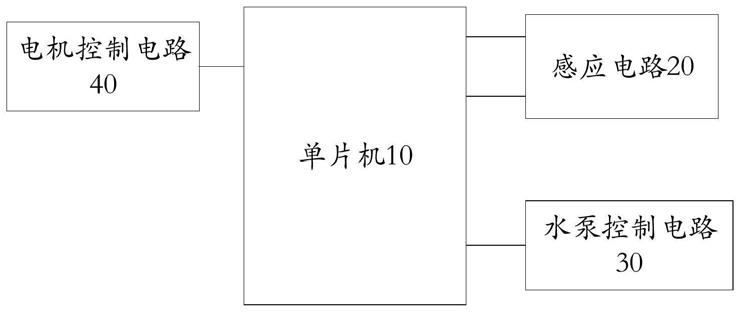
26.图1为本实用新型自动冲奶控制电路第一实施例的结构示意图;
27.图2为本实用新型自动冲奶控制电路中一实施例的感应电路结构示意图;
28.图3为本实用新型自动冲奶控制电路第二实施例的结构示意图;
29.图4为本实用新型自动冲奶控制电路中一实施例的水泵控制电路结构示意图;
30.图5为本实用新型自动冲奶控制电路第三实施例的电路结构示意图。
31.附图标号说明:
32.标号名称标号名称10单片机20感应电路30水泵控制电路40电机控制电路201传感器202转动控制电路401断电保护电路d1第一二极管402过流保护电路q1第一三极管m1冲奶电机rd导通电阻rx限流电阻m2水泵d2第二二极管r1第一电阻q2第二三极管j继电器r2第二电阻r3第三电阻j1开关q3第三三极管r4第四电阻
ꢀꢀ
33.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
34.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
35.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
36.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
37.本实用新型提出一种自动冲奶控制电路。
38.参照图1,在本实用新型实施例中,所述自动冲奶控制电路包括:单片机10、多个电机控制电路40、水泵控制电路30、感应电路20,所述单片机10与所述多个电机控制电路40连接,所述单片机10与所述水泵控制电路30连接,所述感应电路20与所述单片机10连接;其中,所述感应电路20,用于在检测到的信号满足预设条件时,发送转动电信号至单片机10,并根据所述单片机10反馈的转动控制信号将奶瓶移动至设定位置。
39.需要说明的是,本实施例中有多个电机控制电路40,与单片机10的输出端连接,若有3个电机控制电路,则每个电机控制电路与单片机的一个输出端连接,每个电机控制电路对应一个托盘,该托盘可以用来放置奶瓶,单片机每次可以只控制一个电机控制电路工作,也可以每次控制多个电机控制电路工作,可以根据实际使用场景确定,本实施例对此不作限制。
40.可以理解的是,感应电路有一个输出端和一个输入端,感应电路的可与放置奶瓶的托盘对应设置,感应电路可以是红外线感应电路,也可以是重力感应电路,在感应电路是红外线感应电路时,红外线感应电路能够发出并检测红外线信号,预设条件可以是红外线感应电路发出的红外线信号被遮挡;在感应电路是重力感应电路时,重力感应电路能够检测重力信号,预设条件可以根据具体使用场景预先设定,例如,在实际使用中,使用的奶瓶重量为50g,每顿需冲泡奶粉30g,则可以将预设条件设定为重力感应电路检测到重力信号大于80g,则为满足预设条件,在重力信号满足预设条件时,重力感应电路将奶瓶移动至设定位置。
41.所述水泵控制电路30,用于接收所述单片机10输出的水泵控制信号,并根据所述水泵控制信号控制所述设定位置的水泵将水注入所述奶瓶。
42.应该理解的是,在设定位置放置有水泵,用于将水注入奶瓶中,在奶瓶移动至设定位置时,单片机输出水泵控制信号,水泵控制电路根据水泵控制信号控制在设定位置放置的水泵将水注入奶瓶中。
43.应该理解的是,水泵每秒的注水量是固定的,根据婴儿需要食用奶粉量的多少,通过单片机设定水泵的注水时间,从而达到控制注水量的目的,例如:婴儿需要食用的奶粉量为150毫升,水泵每秒注水量为30毫升,则设定水泵每次工作时间为5秒,以此来控制出水量,水泵的工作时间,根据具体使用场景确定,本例是为了更好地说明本实施例,并不构成对本实施例的限制。
44.所述电机控制电路40,用于接收所述单片机10输出的冲奶控制信号,并根据所述冲奶控制信号控制对应的冲奶电机带动所述奶瓶运动以完成冲奶。
45.应该理解的是,在水泵注水完成时会向单片机发送一个电信号,单片机在接收到该电信号时,输出冲奶控制信号,电机控制电路根据冲奶控制信号控制对应的冲奶电机运动以完成冲奶,其中,运动可以是转动、晃动、摇动或其他形式的能使奶粉与水充分混合的运动。
46.进一步地,参考图2,为了提高冲泡效率,所述感应电路20包括:传感器201和转动控制电路202,所述传感器201的输出端与所述单片机10的输入端连接,所述转动电机控制电路202与所述单片机10连接;
47.其中,所述重力传感器201,用于在检测到重力信号满足预设条件时,发送转动电信号至所述单片机10;所述单片机10,用于根据所述转动电信号生成转动控制信号,并将所述转动控制信号输出至所述转动控制电路202;所述转动控制电路202,用于在接收到所述转动控制信号时,根据所述转动控制信号控制转动电机将奶瓶移动至设定位置。
48.可以理解的是,传感器201可以是红外线传感器,也可以是重力传感器;在传感器201为红外线传感器时,能感应到发出的红外线是否被遮挡,可在单片机中提前设定预设条件,在检测到红外线被遮挡时,判定在托盘上放置了需要冲泡的奶瓶,则发送转动电信号至单片机,单片机在接收到转动电信号时,根据转动电信号生成转动控制信号,转动控制电路根据转动控制信号将奶瓶移动至设定位置;在传感器201为重力传感器时,重力传感器可以检测放在托盘上物品的重力,在单片机中提前设定好满足奶瓶重力的预设条件,例如预设条件为:检测到的重力信号大于80g,则判定为在托盘上放置了需要冲泡的奶瓶,在重力传感器检测到重力大于80g时,则发送转动电信号至单片机,单片机在接收到转动电信号时,根据转动电信号生成转动控制信号,转动控制电路根据转动控制信号将奶瓶移动至设定位置。
49.在具体实现中,例如,转动控制电路中电机的轴和一个圆盘连接,圆盘随着电机的运行而转动,在圆盘上设置有三个托盘用来放置奶瓶,在待冲泡的奶瓶放置到其中任意一个托盘上时,红外线传感器检测到红外线被遮挡或重力传感器检测到重力信号为82g,则发送转动电信号至单片机,单片机根据转动电信号生成转动控制信号并将转动控制信号发送至转动控制电路,转动控制电路中的电机运行带动圆盘转动一定角度,圆盘转动带动托盘转动从而将待冲泡的奶瓶移动至设定位置。
50.本实施例通过提出一种自动冲奶控制电路,所述电路包括:单片机、多个电机控制电路、水泵控制电路、感应电路,所述单片机与所述多个电机控制电路连接,所述单片机与所述水泵控制电路连接,所述感应电路与所述单片机连接;其中,所述感应电路,用于在检测到的信号满足预设条件时,发送转动电信号至单片机,并根据所述单片机反馈的转动控制信号将奶瓶移动至设定位置;所述水泵控制电路,用于接收所述单片机输出的水泵控制信号,并根据所述水泵控制信号控制所述设定位置的水泵将水注入所述奶瓶;所述电机控制电路,用于接收所述单片机输出的冲奶控制信号,并根据所述冲奶控制信号控制对应的冲奶电机带动所述奶瓶运动以完成冲奶;由于本实施例是通过在感应电路检测到的信号满足预设条件时,发送转动电信号至单片机,并根据单片机反馈的转动控制信号将奶瓶移动至设定位置,在奶瓶移动到设定位置时,单片机输出水泵控制信号,水泵控制电路根据水泵控制信号控制设定位置的水泵将水注入奶瓶,在奶瓶注水完成时,单片机输出冲奶控制信号,冲奶控制电路根据冲奶控制信号控制冲奶电机带动奶瓶运动以完成冲奶,解决了现有技术中在冲奶时需要人工操作的技术问题,提高了冲泡奶粉的效率。
51.参考图3,图3是本实用新型自动冲奶控制电路第二实施例的结构框图。
52.基于上述第一实施例,在本实施例中,所述电机控制电路40包括:限流电阻rx、导通电阻rd、第一三极管q1、断电保护电路401和冲奶电机m1;其中,所述限流电阻rx的第一端
与所述单片机10的第一输出端连接,所述限流电阻rx的第二端与所述导通电阻rd的第一端连接,所述导通电阻rd的第一端还与所述第一三极管q1的基极连接,所述导通电阻rd的第二端接地,所述第一三极管q1的发射极与所述导通电阻rd的第二端连接,所述第一三极管q1的集电极与所述断电保护电路401的第一端连接,所述第一三极管q1的集电极还与所述冲奶电机m1的第一端连接,所述冲奶电机m1的第二端与所述断电保护电路401的第二端连接,所述冲奶电机m1的第二端还与电源连接。
53.可以理解的是,为单片机输出的电信号,在水泵注水完成时和/或感应电路感应到的信号表示完成注水时,向单片机发送一个电信号,单片机在接收到该电信号时,输出冲奶控制信号motor1,限流电阻rx用于限制电流大小,避免烧坏三极管q1,冲奶控制信号是电信号,在经过限流电阻rx后,通过导通电阻rd为三极管q1提供导通电压,三极管q1导通后,冲奶电机m1所在的回路导通,冲奶电机开始工作。
54.应该理解的是,在断电瞬间,冲奶电机m1中还存在电流,为了避免电流流入三极管q1而导致其被烧坏,在电机断电瞬间,断电保护电路导通,避免电流流入三极管q1。
55.进一步地,参考图3,为了在电机断电时,保护电路不被烧坏,所述断电保护电路401包括第一二极管d1,所述第一二极管d1的阳极与所述第一三极管q1的集电极连接,所述第一二极管d1的阴极与电源连接。
56.可以理解的是,二极管具有单向导电性,在电机断电时,二极管d1导通,避免了电流流入三极管q1。
57.进一步地,参考图4,为了提高奶粉冲泡效率,所述所述水泵控制电路包括:第一电阻r1、第二电阻r2、第二三极管q2、第二二极管d2和水泵m2;其中,
58.所述第一电阻r1的第一端与所述单片机10连接,所述第一电阻r1的第二端与所述第二电阻r2的第一端连接,所述第二电阻r2的第一端还与所述第二三极管q2的基极连接,所述第二电阻r2的第二端与所述第二三极管q2的发射极连接,所述第二二极管q2的发射极接地,所述第二三极管q2的集电极与所述第二二极管d2的阳极连接,所述第二三极管q2的集电极还与所述水泵m2的第一端连接,所述第二二极管d2的阴极与所述水泵m2的第二端连接,所述水泵m2的第二端还与电源连接。
59.可以理解的是,在奶瓶移动到设定位置时,单片机发出水泵控制信号motor2,水泵控制信号为电信号,电阻r1在此为限流电阻,电流流经电阻r1后,流经电阻r2,电阻r2为三极管q2,提供导通电压,三极管q2导通后,水泵m2所在的回路导通,水泵m2开始工作,在断电瞬间,二极管d2导通,保证了电流不流入三极管q2,起到断电保护的作用。
60.本实施例通过提出一种电机控制电路和水泵控制电路,能够根据单片机输出的信号控制冲奶电机和水泵工作,并在在断电时,二极管导通,避免了电流流入三极管,能够有效地保护电路。
61.参考图5,图5是本实用新型自动冲奶控制电路第三实施例结构图。
62.基于上述实施例,本实施例中所述电机控制电路还包括:过流保护电路402;其中,
63.所述过流保护电路402,用于在所述电机故障导致流过所述电机电流大于预设电流阈值时,断开所述电机与电源连接。
64.可以理解的是,预设电流阈值是保证电机正常工作的最大电流阈值,在干路电流突然增大时,有可能烧坏电机,例如在电机堵转时,电流增大,有可能烧坏电机,过流保护电
路402能在电流大于预设电流阈值时,断开电机m1与电源的连接,起到保护电机的作用。
65.进一步地,参考图5,为了在电机过流时,保护电机不被烧坏,所述过流保护电路包括:第三电阻r3、第四电阻r4、第三三极管q3、继电器j和开关j1;其中,所述第三电阻r3的第一端与所述第一三极管q1的集电极连接,所述第三电阻r3的第二端与所述冲奶电机m1的第一端连接,所述冲奶电机m1的第二端与所述开关j1的第一端连接,所述开关j1的第二端与电源连接,所述第四电阻r4的第一端与所述第三电阻r3的第二端连接,所述第四电阻r4的第二端与所述第三三极管q3的基极连接,所述第三三极管q3的发射极与所述第三电阻r3的第一端连接,所述第三三极管q3的集电极与所述继电器j的第一端连接,所述继电器j的第二端与所述开关j1的第二端连接。
66.可以理解的是,在冲奶电机m1正常工作时,流经第三电阻r3的电流较小,三极管q3基极的电压小于阈值电压,三极管q3截止,在电机m1发生故障时,电流瞬间增大,电阻r3两端的电压增大,三极管q3基极的电压大于阈值电压,三极管q3导通,继电器j被触发从而控制开关j1断开,从而断开冲奶电机m1与电源的连接,达到保护冲奶电机m1的效果,电阻r4在此的作用是限流电阻。
67.本实施例通过提出一种过流保护电流,在冲奶电机电流瞬间增大时,三极管导通,从而触发继电器控制冲奶电机m1与电源之间的开关断开,能够在冲奶电机过流时,断开电源,达到过流保护的技术效果。
68.为实现上述目的,本实用新型还提出一种装置,所述装置包括如上所述的自动冲奶控制电路。该电路的具体结构参照上述实施例,由于本装置采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。
69.为实现上述目的,本实用新型还提出一种系统,所述系统包括如上所述的自动冲奶控制电路。该电路的具体结构参照上述实施例,由于本系统采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。
70.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。