1.本实用新型涉及清扫机器人设备技术领域,尤其涉及一种智能计算机用具有打扫功能的机器人。
背景技术:
2.智能计算机已经成为一个动态的发展的概念,它始终处于不断向前推进的计算机技术的前沿,能存储大量信息和知识,会推理(包括演绎与归纳),具有学习功能,能以自然语言、文字、声音、图形、图像和人交流信息和知识的非冯诺依曼结构的通用高速并行处理计算机,是现代计算技术、通信技术、人工智能和仿生学的有机结合,供知识处理用的一种工具。
3.智能计算机若一直处于灰尘积灰的环境,则会非常影响智能计算机的工作效率,目前,传统的清扫机器人在使用过程中存在一些不足之处,如对连接管大多为固定式安装,后期的拆卸维护修理更换,较为繁琐,费时费力,且垃圾箱为一体式,不可以及时清理,导致垃圾堆积于垃圾箱内部,导致清扫机器人的清洁能力下降。
技术实现要素:
4.本实用新型的目的在于:为了解决清扫机器人垃圾箱与连接管的问题,而提出的一种智能计算机用具有打扫功能的机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种智能计算机用具有打扫功能的机器人,包括安装底座、垃圾箱、离心风扇和连接管,其特征在于,所述安装底座的上表面左端设置有工作电机,所述工作电机安装于机箱内部,所述机箱的顶端固定连接有固定板,所述离心风扇的外部设置有保护壳,所述保护壳的顶端固定连接有安装箱,所述安装箱的内部安装有小型电机,所述小型电机的输出轴固定连接于离心风扇的顶端,所述垃圾箱的左端顶部固定连接有连接管件,垃圾箱的底部设置有收纳盒,所述收纳盒的顶部设置有锁止结构。
7.作为上述技术方案的进一步描述:
8.所述连接管件包括管体、卡管爪、推动件、密封圈和密封圆环,所述连接管件从外至内分别为管体、推动件和密封圈,管体的内壁上下两侧靠近垃圾箱的一处均开设有内槽,所述内槽内设置有锁紧弹簧,两个所述锁紧弹簧相对的一端均固定连接有卡管爪,所述卡管爪贯穿出密封圈,所述推动件贯穿出管体远离垃圾箱的一端设置有推动弹簧,且推动件可在管体内部滑动,推动件远离垃圾箱的一端固定连接有密封圆环。
9.作为上述技术方案的进一步描述:
10.所述收纳盒的顶端设置有锁止结构,所述锁止结构包括连接转轴、连接杆、弹性弹簧和卡舌,所述连接杆转动连接于连接转轴的右端,所述连接杆的底端开设有安装槽,所述安装槽内设置有弹性弹簧,所述弹性弹簧的底端固定连接有卡舌。
11.作为上述技术方案的进一步描述:
12.所述垃圾箱的右端开设有滑槽,所述连接转轴的左端滑动连接于所述滑槽的内部,所述收纳盒的上表面右端开设有卡槽,所述卡槽与所述卡舌相互配合。
13.作为上述技术方案的进一步描述:
14.所述垃圾箱的左端顶部位置处开设有进料口,连接管的一端连接于保护壳的顶端,连接管的另一端连接于连接管件的左端,且连接管的中段位置处套设有两个固定管,所述固定管安装于固定板的顶端。
15.作为上述技术方案的进一步描述:
16.所述安装底座的底端四角处设置有驱动轮,所述收纳盒的右端固定连接有拉手,安装底座的上表面中段位置处固定连接有放置台,所述放置台的上表面呈弧形,放置台的顶端设置有手持式吸尘器,手持式吸尘器的底端连接有波纹管,所述波纹管的一端连接于垃圾箱。
17.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
18.1、本实用新型中,通过设置连接管件,安装时只需将连接管插入连接管件内部,密封圈使得连接管内部密闭,使用两个卡管爪相互配合卡接快速密闭连接管,便于安装,且拆卸时,只需按动密封圆环推动推动件前移,将卡管爪压入锁紧弹簧的内槽内部,即可将连接管轻易拔出,便于后期的拆卸维护修理更换,通过设置锁止结构,可将收纳盒紧紧锁住,防止在清扫过程中滑出,分体式的垃圾箱,可及时对垃圾箱内部清理,不会导致垃圾堆积于垃圾箱内部,导致清扫机器人的清洁能力下降,通过设置手持式吸尘器,可对机箱侧壁进行清洁,提高计算机的整洁程度。
附图说明
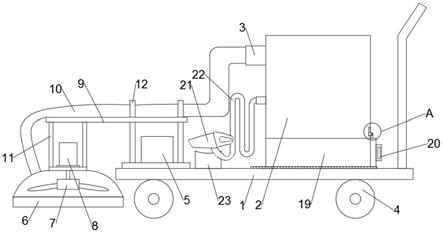
19.图1示出了本实用新型实施例提供的结构示意图;
20.图2示出了本实用新型实施例提供的连接管件结构示意图;
21.图3示出了本实用新型实施例的图1放大图。
22.图例说明:
23.1、安装底座;2、垃圾箱;3、连接管件;301、管体;302、锁紧弹簧;303、卡管爪;304、推动件;305、密封圈;306、密封圆环;4、驱动轮;5、工作电机;6、保护壳;7、离心风扇;8、小型电机;9、固定板;10、连接管;11、安装箱;12、固定管;13、滑槽;14、连接转轴;15、连接杆;16、弹性弹簧; 17、卡舌;18、卡槽;19、收纳盒;20、拉手;21、手持式吸尘器;22、波纹管;23、放置台。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
25.请参阅图1-3,本实用新型提供一种技术方案:一种智能计算机用具有打扫功能的机器人,包括安装底座1、垃圾箱2、离心风扇7和连接管10,其特征在于,安装底座1的上表面左端设置有工作电机5,工作电机5安装于机箱内部,机箱的顶端固定连接有固定板9,离心
风扇7的外部设置有保护壳6,保护壳6 的顶端固定连接有安装箱11,安装箱11的内部安装有小型电机8,小型电机8 的输出轴固定连接于离心风扇7的顶端,垃圾箱2的左端顶部固定连接有连接管件3,垃圾箱2的底部设置有收纳盒19,收纳盒19的顶部设置有锁止结构。
26.具体的,如图2所示,连接管件3包括管体301、卡管爪303、推动件304、密封圈305和密封圆环306,连接管件3从外至内分别为管体301、推动件304 和密封圈305,管体301的内壁上下两侧靠近垃圾箱2的一处均开设有内槽,内槽内设置有锁紧弹簧302,两个锁紧弹簧302相对的一端均固定连接有卡管爪 303,卡管爪303贯穿出密封圈305,推动件304贯穿出管体301远离垃圾箱2 的一端设置有推动弹簧,且推动件304可在管体301内部滑动,推动件304远离垃圾箱2的一端固定连接有密封圆环306,安装时只需将连接管10插入管体 301内部,密封圈305使得连接管10内部密闭,使用两个卡管爪303相互配合卡接快速密闭连接管10,便于安装,且拆卸时,只需按动密封圆环306推动推动件304前移,将卡管爪303压入弹簧的内槽内部,即可将连接管10轻易拔出。
27.具体的,如图3所示,收纳盒19的顶端设置有锁止结构,锁止结构包括连接转轴14、连接杆15、弹性弹簧16和卡舌17,连接杆15转动连接于连接转轴 14的右端,连接杆15的底端开设有安装槽,安装槽内设置有弹性弹簧16,弹性弹簧16的底端固定连接有卡舌17。
28.具体的,如图3所示,垃圾箱2的右端开设有滑槽13,连接转轴14的左端滑动连接于滑槽13的内部,收纳盒19的上表面右端开设有卡槽18,卡槽18与卡舌17相互配合,卡舌17的顶端为圆弧形,便于与卡槽18卡接。
29.具体的,如图1所示,垃圾箱2的左端顶部位置处开设有进料口,连接管 10的一端连接于保护壳6的顶端,连接管10的另一端连接于连接管件3的左端,且连接管10的中段位置处套设有两个固定管12,固定管12安装于固定板9的顶端,固定管12可稳固连接管10。
30.具体的,如图1所示,安装底座1的底端四角处设置有驱动轮4,收纳盒 19的右端固定连接有拉手20,安装底座1的上表面中段位置处固定连接有放置台23,放置台23的上表面呈弧形,放置台23的顶端设置有手持式吸尘器21,手持式吸尘器21的底端连接有波纹管22,波纹管22的一端连接于垃圾箱2,工作电机5可为驱动轮4提供动力,拉手20便于收纳盒19的取出,手持式吸尘器21的吸尘口安装有毛刷圆盘,毛刷圆盘可用于清洁灰尘。
31.工作原理:使用时,首先通过连接管件3将垃圾桶2与连接管10相连接,安装时只需将连接管10插入管体301内部,密封圈305使得连接管10内部密闭,使用两个卡管爪303相互配合卡接快速密闭连接管10,便于安装,且拆卸时,只需按动密封圆环306推动推动件304右移,将卡管爪303压入锁止弹簧的安装槽内部,即可将连接管10轻易拔出,便于使用人员使用,然后通过工作电机5带动驱动轮4运转,使得清扫机器人工作,小型电机8带动离心风扇7 对地面垃圾灰尘进行吸收,垃圾灰尘通过连接管10从进料口进入垃圾箱2内部,使用者可通过使用手持式吸尘器21可对计算机机箱侧壁进行清灰处理,毛刷圆盘可用于清洁灰尘,通过波纹管22将垃圾传送至垃圾箱2,当清扫机器人清扫一段时间后,通过锁止结构取出收纳盒19,通过滑槽13向上滑动连接转轴14,将卡舌17从卡槽18滑出,即可取出收纳盒19,及时对垃圾箱2内部清理,防止导致垃圾堆积于垃圾箱2内部,导致清扫机器人的清洁能力下降,当收纳盒 19清理干净,在放置于垃圾箱2的底部,在通过连接转轴14,转动连接杆15,圆弧形的卡舌17压缩弹性弹簧16,使得卡舌17收入至安装槽的内部,当卡舌 17卡接至卡槽18的内部,卡舌17在弹性弹簧16的作用下弹出,完成卡接,将收纳盒19锁止,防止在清扫过程中
滑出。
32.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。