1.本实用新型属于清洁技术领域,具体涉及一种免手撕剥离拖布的清洁工具,特别可用于无绳手持拖地机。
背景技术:
2.现有技术中,中国专利申请cn209499620u披露了一种多功能组合式吸尘拖地机,包括手持式吸尘主机、拖地机本体以及长杆状的把杆,手持式吸尘主机和把杆以及把杆和拖地机本体可两两分离和组装,该组合式吸尘拖地机包括如下三种工作模式:
3.第一模式、将手持式吸尘主机从把杆上拆离,形成单独的手持式吸尘器进行工作;
4.第二模式、将把杆和拖地机本体两者组合,形成推杆式拖地机进行工作;
5.第三模式、将手持式吸尘主机和把杆进行组合,将拖地机本体从把杆上拆离,形成推杆式吸尘器进行工作,该结构能够根据不同组合满足不同方式的清洁需求。
6.现有技术中存在的问题在于,拖地机工作结束后,拖布需要操作者用手从机器上拆下来进行清洗或更换,操作不方便而且容易弄脏双手。
7.如何提供一种免手撕剥离拖布的拖地机,是一个急需解决的问题。
技术实现要素:
8.本实用新型一实施例提供一种清洁工具,用于解决现有技术中需要用手将拖布拆下来的问题,包括:
9.一实施例中,一种清洁工具,包括拖地工作头,所述拖地工作头包括至少一个可转动的并用以粘附拖布的底盘,还包括拖布剥离装置,该拖布剥离装置包括:
10.剥离爪组件,可接近或远离所述底盘的边缘,并具有一可以开合的夹口;
11.释放操作件,作用于所述的剥离爪组件,并可控制所述剥离爪组件接近或远离所述底盘的边缘,并可控制所述夹口的开合。
12.优选的,在上述的清洁工具中,所述的剥离爪组件包括构成所述夹口的第一夹持爪和第二夹持爪,
13.所述第一夹持爪具有可对拖布底面进行支撑的第一接触面,
14.所述第二夹持爪具有可对拖布顶面进行挤压的第二接触面,
15.所述第一夹持爪可以接近所述底盘的边缘,并可将延伸出底盘边缘的拖布挤压在第一接触面和第二接触面之间。
16.优选的,在上述的清洁工具中,所述第一夹持爪通过摆动的方式,使第一接触面接近或远离所述底盘的边缘。
17.优选的,在上述的清洁工具中,所述第二夹持爪在竖直方向可移动,使第二接触面接近或远离所述底盘的边缘。
18.优选的,在上述的清洁工具中,所述第二夹持爪的表面沿竖直方向设置有齿条,
19.剥离爪组件还包括与所述齿条啮合的第一齿轮,该第一齿轮通过转动以驱动所述
第二夹持爪上下移动。
20.优选的,在上述的清洁工具中,所述第一夹持爪的转轴的一端设置有第二齿轮,
21.所述第一齿轮和第二齿轮之间啮合。
22.优选的,在上述的清洁工具中,还包括在竖直方向上作用于所述第二夹持爪的弹性件,该弹性件可驱动所述第二夹持爪在背离所述底盘的方向移动。
23.优选的,在上述的清洁工具中,所述剥离爪组件还包括第一传动轮,
24.所述第一夹持爪的转轴的一端设置有第二传动轮,
25.第一传动轮和第二传动轮之间传动连接,
26.释放操作件作用于第一传动轮,并可控制其转动。
27.优选的,在上述的清洁工具中,所述清洁工具还包括把杆,所述拖地工作头安装于把杆的末端,
28.所述释放操作件滑动设置于把杆上,释放操作件和第一传动轮之间通过传动线绳连接。
29.优选的,在上述的清洁工具中,所述剥离爪组件还包括电机,该电机作用于第一传动轮并可带动其转动,
30.释放操作件与电机之间通信并可控制电机工作。
31.优选的,在上述的清洁工具中,所述剥离爪组件还包括位置传感器或压力传感器,以感知第一夹持爪和第二夹持爪的位置,或夹口之间的挤压力。
32.优选的,在上述的清洁工具中,所述底盘的表面设置有可与拖布粘附的刺毛毡。
33.与现有技术相比,本实用新型采用一种新颖的拖布释放机构,可以一键式丢弃使用过的脏拖布,避免手的直接接触。
附图说明
34.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
35.图1是本技术一实施方式中清洁工具的结构示意图;
36.图2是本技术一实施方式中负压主机的结构示意图;
37.图3是图1中a方向的剖视图;
38.图4是图3中b方向的示意图;
39.图5是本技术一实施方式中拖地工作头的剖视图;
40.图6是本技术一实施方式中拖地工作头的工作状态示意图;
41.图7是本技术一实施方式中把杆的结构示意图。
具体实施方式
42.以下将结合附图所示的各实施方式对本实用新型进行详细描述。但该等实施方式并不限制本实用新型,本领域的普通技术人员根据该等实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。
43.参图1所示,本技术一实施例中,提供了一种清洁工具10,该清洁工具包括负压主机11、把杆12和拖地工作头13,把杆12连接于负压主机11和拖地工作头13之间。
44.结合图2所示,负压主机11主要包括负压风机111、垃圾盒112、电池组113和电性连接端子114。负压风机111可以产生负压的,由直流电机驱动,负压风机11用于驱动空气的流动,将污浊空气从把杆吸入主机,并通过排气口排出干净的空气。垃圾盒112内有过滤装置(hapa)1121用于将垃圾、粉尘从污浊空气中分离出来;由用户操作的垃圾盒盖1122,用于排出盒内的垃圾。电池组113用于存储能量,并为电机提供能量;电池组可以是内置的,也可以是可拨插更换的电池包。电性连接端子114用于通过把杆12电性联接各工作头。
45.结合图2所示,把杆12用于联接负压主机11和拖地工作头13,提供气流和电流流动的路径。
46.结合图3所示,拖地工作头13包括箱体131和用于拖地的底盘132,底盘132可转动设置于箱体131的底端,且底盘132的旋转轴垂直于待清洁的表面,箱体131内设置有可以驱动底盘132转动的驱动电机133。
47.结合图4所示,拖地工作头13还包括吸口134,吸口134可选地设置于箱体131朝向待清洁表面的底面,用于吸取待清洁表面上的垃圾。
48.在优选的实施例中,底盘132并列设置有2个,该2个底盘分别由电机通过减速箱驱动。
49.结合图4所示,底盘132朝向待清洁表面的一面(底面)安装魔术贴(刺毛粘)1321,用于粘贴拖布。
50.拖地工作头13还包括电性联接端子(未图示),该电性联接端子安装于箱体131,用于通过把杆12与负压主机11联接,并由操作者通过负压主机11上的开关和控制器去控制驱动电机133的工作。
51.拖地工作头13在工作一定时间后,位于底盘132表面的拖布需要进行更换,一般是需要将拖地工作头抬起,然后人工将拖布从底盘132表面撕扯下来,操作极为不方便,而且容易弄脏手。
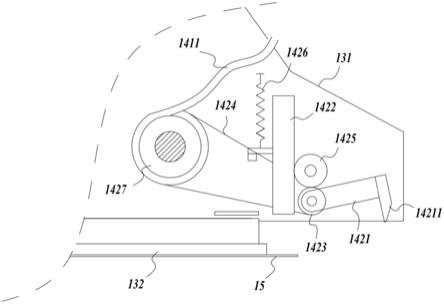
52.为了解决容易弄脏手的问题,结合图5和图7所示,本技术一实施例中,清洁工具还包括拖布剥离装置14,拖布剥离装置14包括安装于把杆12上的释放操作件141和安装在箱体131上剥离爪组件142,释放操作件141作用于剥离爪组件142,并通过剥离爪组件142可操作地将拖布15从底盘132上剥离。
53.为方便介绍,图5中仅仅提供了单个底盘132剖视图,对于多个底盘132的情况,其对应的拖布剥离装置14结构相同,不再赘述。
54.一实施例中,剥离爪组件142包括构成一夹口的第一夹持爪1421和第二夹持爪1422,第一夹持爪1421具有可对拖布底面进行支撑的第一接触面,第二夹持爪1422具有可对拖布顶面进行挤压的第二接触面,释放操作件141可以作用于剥离爪组件142,并可使得夹口接近于凸伸出底盘侧方的拖布并对拖布实现夹持,释放操作件141还可以作用于剥离爪组件142,并可使得夹口释放所述的拖布15,并远离所述的拖布。
55.第一夹持爪1421通过摆动的方式,使第一接触面接近或远离所述拖布15的边缘。
56.一实施例中,第一夹持爪1421的一端与箱体131之间转动连接,另一端凸伸有可对拖布底端进行支撑的支撑部14211,所述第一接触面形成于该支撑部14211上。
57.剥离爪组件142还包括第一传动轮1427,第一传动轮1427转动设置于箱体131内,第一夹持爪1421转轴的一端连接有第二传动轮1423,第一传动轮1427和第二传动轮1423之间传动连接。
58.在优选实施例中,第一传动轮1427和第二传动轮1423之间可以通过皮带1424传动连接,在其他实施例中,第一传动轮1427和第二传动轮1423之间也可以通过线绳连接,还可以直接齿轮啮合。
59.该技术方案中,第一传动轮1427转动时可以将动力传递至第二传动轮1423,进而驱动第一夹持爪1421进行摆动,使得支撑部14211接近或远离拖布15的底面。
60.第二夹持爪1422在竖直方向可移动,使第二接触面接近或远离拖布15的上表面。箱体131内可以设置导引第二夹持爪1422上下移动的轨道(图未示)。
61.为了驱动第二夹持爪1422上下移动,第二夹持爪1422的表面沿竖直方向设置有齿条(图未示),箱体131内转动设置有与齿条啮合的第一齿轮1425,该第一齿轮1425通过转动以驱动所述第二夹持爪1422上下移动。
62.为了实现第一夹持爪1421和第二夹持爪1422之间的活动联动,第一夹持爪1421转轴的一端还设置有第二齿轮(图未示),第二齿轮和第一齿轮1425之间啮合,第一齿轮1425转动时,可以将动力传递给第二齿轮,第二齿轮转动以带动第二夹持爪1422上下移动。
63.第二齿轮和第二传动轮1423之间同轴设置,且相对固定。
64.进一步地,剥离爪组件142还包括在竖直方向上作用于所述第二夹持爪1422的拉簧1426。拉簧1426的底端连接于第二夹持爪1422,拉簧1426的顶端固定于箱体131上,拉簧1426作用于第二夹持爪1422并提供第二夹持爪1422远离拖布15上表面的动力。
65.拉簧起复位作用,其工作时,拉簧1426向上拉动第二夹持爪1422上移,使得第二夹持爪1422远离拖布15的上表面,第二夹持爪1422上移过程中,通过齿条带动第一齿轮1425转动,第一齿轮1425进一步将动力通过第二齿轮传递至第一夹持爪1421,进而驱动第一夹持爪1421摆动,并使得第一夹持爪1421脱离拖布15的下表面,并转动至箱体131内。
66.释放操作件141作用于第一传动轮1427,并可控制其转动。
67.一实施例中,结合图7所示,释放操作件141滑动设置于把杆12上,释放操作件141和第一传动轮1427之间通过传动线绳1411连接。
68.在优选的实施例中,传动线绳1411为钢丝绳。
69.工作时,释放操作件141沿把杆12的轴向进行拉动,进而可以通过传动线绳1411直接驱动第一传动轮1427转动,通过动力传递驱动剥离爪组件142对凸伸出底盘边缘的拖布进行夹持;当需要释放拖布时,松开释放操作件141,拉簧1426作为动力源,依次将动力传递至第一齿轮1425、第二传动轮1423、皮带1424、第一传动轮1427、传动线绳1411和释放操作件141,然后实现释放操作件141的复位。
70.为了感知剥离爪组件142是否对拖布15夹持到位,还可以设置位置传感器或压力传感器,用以感知第一夹持爪1421和第二夹持爪1422的位置,或夹口之间的挤压力。
71.结合图6所示,本实施例的整体的工作过程包括:
72.抹布剥离过程
73.(1)、沿把杆12延伸方向拉动释放操作件141(拉动前状态参图5所示);
74.(2)、释放操作件141通过传动线绳1411带动第一传动轮1427转动;
75.(3)、第一传动轮1427通过皮带1424带动第二传动轮1423和第二齿轮转动;
76.(4)、第二传动轮1423带动第一夹持爪1421摆动,使其第一接触面接近抹布15的底面;同时,第二齿轮带动第一齿轮1425转动,第一齿轮1425驱动第二夹持爪1422向下移动,并使其第一接触面接近抹布15的顶面,第一接触面和第二接触面相向移动并对拖布15进行夹持固定,参图6中(a);
77.(5)、位置传感器或压力传感器感知到拖布被夹持后,将信号传递至箱体内的控制器,控制器对电机进行控制,并驱动底盘132转动,比如转动5秒或驱动底盘132旋转一周,由于拖布的一端被夹持固定,从而在底盘转动时可以将拖布15从底盘的下表面剥离,此时,拖布15的边缘仍然被剥离爪组件142夹持,参图6中(b)。
78.复位过程
79.(1)、松开把杆12上的释放操作件141;
80.(2)、拉簧1426拉动第二夹持爪1422向上移动;
81.(3)、第二夹持爪1422依次将动力传递至第一齿轮1425、第二齿轮和第一夹持爪1421,第一夹持爪1421摆动并返回至箱体内,拖布15被释放并从底盘132的下方脱落,参图6中(c);
82.同时,第二齿轮转动时,还带动第二传动轮1423转动,进而将动力传递至皮带1424、第一传动轮1427、传动线绳1411和释放操作件141,从而实现释放操作件141的复位。
83.在本技术的第二实施例中,与上述实施例相比,第一传动轮1427的动力源方式不同,该实施例中,第一传动轮1427直接由安装于箱体内的小电机(图未示)驱动,释放操作件141在滑动过程中,触发信号并将信号传递至箱体内的控制器,通过控制器控制小电机的启动。
84.在本技术的第三实施例中,在箱体内空间布局允许的情况下,传动线绳1411也可以直接作用于第二传动轮1423,直接驱动第二传动轮1423的转动,在该情形下,可以取消第一传动轮1427和皮带1424的设置。
85.但是需要说明的是,由于释放操作件141的滑动距离不宜过长,因此通过设置两个传动轮,可以控制一定的传动比,比如,第一传动轮1427的直径大于第二传动轮1423的直径,这样释放操作件141通过小距离的移动,便可实现第一夹持爪1421的大角度偏转。
86.在本技术的第四实施例中,与第三实施例相比,第二传动轮1423的动力源方式不同,该实施例中,第二传动轮1423直接由安装于箱体内的小电机(图未示)驱动,释放操作件141在滑动过程中,触发信号并将信号传递至箱体内的控制器,通过控制器控制小电机的启动。
87.在本技术的第五实施例中,第二夹持爪1422可以是与箱体相对固定的构件,其底端具有第二接触面,该第二接触面位于拖布15的上方,并与拖布上表面之间保持相对固定的间隙,第二接触面不能低于底盘的下表面,否则工作时会与地面之间形成摩擦,第二接触面也不能距离拖布15的上表面太远,否则很难与第一夹持爪1421之间进行夹持。
88.该实施例中,工作时,第一夹持爪1421通过摆动使其第一接触面接近拖布15的下表面,当与第一拖布15接触时,进一步移动并将拖布抵持在第二夹持爪1422的第二接触面上,第一夹持爪1421整个摆动过程中,第二夹持爪1422保持与箱体的相对静止。
89.在本技术的一实施例中,释放操作件141除了可以设置于把杆12上外,还可以设置
于箱体上,对于第二实施例和第四实施例的情况,由于释放操作件141和小电机之间的通信可以采用无线的方式,释放操作件141也可以设置于负压主机11,另外,释放操作件还可以为按钮、拨动开关、触摸屏控制等方式。
90.在本技术的一实施例中,第一夹持爪1421也可以采用两轴的移动方式,比如,第一夹持爪1421先向下移动并使得第一接触面位于拖布15的下方,然后再向接近底盘的方向水平移动,然后再进一步向上移动,从而实现对拖布15底面的支撑。
91.在本技术的一实施例中,第一夹持爪1421和第二夹持爪1422可以采用不同的动力源,也就是可以分别独立实现控制,比如第一夹持爪1421可以通过钢丝绳进行拉动,第二夹持爪1422可以通过小电机进行驱动。
92.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
93.此外,应当理解,虽然本说明书按照实施例加以描述,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。