1.本实用新型属于人工智能设备技术领域,具体涉及智能扫地机器人。
背景技术:
2.在人工智能的时代背景下,越来越多的人工智能设备被研发制造,而智能家居作为低门槛、高使用频率的智能设备,在市场上被广泛应用。智能扫地机器人做为家居清洁的首选产品,利用一定的人工智能技术,对生活和工作区域进行自动清理,节省了大量的人力资源和时间资源的投入,提高了生活幸福指数和工作效率。
3.申请号为cn 205514409 u的中国专利公开一种智能清洁扫地机器人,包括机体、垃圾收集盒以及吸尘电机,所述机体包括底面、与所述底面相对设置的顶面、用于连接所述底面和所述顶面的侧面,所述侧面上开设有安装口,所述安装口朝向所述机体内延伸设置有安装槽,所述垃圾收集盒与所述吸尘电机固定为一体,两者活动设置在所述安装槽内。通过将安装口开设在机体的侧面,可以将垃圾收集盒和吸尘电机固定为一体,然后将固定为一体的两者一同插入到安装槽内或者一同由安装槽抽出,这样可以防止垃圾收集盒与吸尘电机之间的密封因多次分离和安装出现失效的情况,使得扫地机器人可长时间保持吸取有效的状态。
4.然而,以上现有技术的扫地机器人只能完成一些简单的清理任务。只能依照用户设定的虚拟路线进行工作,对垃圾识别误差较大,清扫效果不佳,遇到障碍物常出现停滞或者碰撞损坏现象,智能化程度较低。
技术实现要素:
5.针对现有技术中存在的上述不足之处,本实用新型提供了一种智能扫地机器人,用以解决现有技术的扫地机器人对障碍物识别和绕行困难,对垃圾识别清理程度不高等问题。
6.为了解决上述技术问题,本实用新型采用了如下技术方案:一种智能扫地机器人,包括机体外壳、垃圾清扫系统和转向系统,垃圾清扫系统和转向系统安装在机体外壳内部;
7.所述垃圾清扫系统包括扫地刷和探测传感器,所述扫地刷置于扫地机器人底部前端,所述探测传感器置于机器人底部,所述探测传感器与扫地刷处于同一水平线上;
8.所述转向系统包括碰撞式障碍传感器和转向轮机构,所述碰撞式障碍传感器安装在机体外壳侧面前端,转向轮机构安装在机体外壳内部。
9.进一步,所述垃圾清扫系统还包括垃圾收集盒和垃圾吸入口,所述垃圾吸入口置于机器人底部,所述垃圾收集盒置于机器人底部,该垃圾吸入口与垃圾收集盒内部贯通连接,且该垃圾收集盒设有两个,所述两个垃圾收集盒对称分布在垃圾吸入口两侧。
10.进一步,所述扫地刷包括动力电机、主动齿轮、扫地刷头、清理刮板、从动齿轮和从动轮固定柱和扫地刷支架,所述动力电机安装在扫地刷支架上,所述主动齿轮与动力电机同轴连接,且所述主动齿轮与从动齿轮啮合,所述从动齿轮与从动轮固定柱同轴连接,所述
扫地刷头安装在从动齿轮上,所述清理刮板环形均布安装在扫地刷头上。
11.进一步,所述转向轮机构包括连接导杆、轮子支架、行走轮、转向轮和转向电机,所述轮子支架呈三角分布,三根连接导杆将三个轮子支架固定连接,所述转向轮置于轮子支架内部,所述转向电机安装在轮子支架外部,且处于轮子支架与连接导杆连接形成的三角机构的顶点位置,转向电机与转向轮同轴连接,所述行走轮置于转向轮上,呈横向环形均布。
12.进一步,机体外壳为圆柱型构造,包括底板、顶壳、侧板,底板置于机器人的底部,顶壳置于机器人顶部,与底板相对,侧板置于机器人侧面,连接顶壳和底板。
13.进一步,所述探测传感器包括至少一个探测信号发射器和至少一个探测信号接收器,所述探测信号发射器和探测信号接收器连接,且所述至少一个探测信号发射器和至少一个探测信号接收器分别设置在所述机器人底部。
14.本实用新型与现有技术相比,具有如下有益效果:
15.进行清扫作业时,碰撞感应装置在碰撞到障碍物后调节转向轮机构,进行机器人的转向动作,绕过障碍继续工作。在探测传感器检测到垃圾时,接收到信号后,扫地刷对垃圾进行清扫,最后通过垃圾吸入口进入垃圾收集盒中。
16.本实用新型结构简单,操作方便,稳定可靠,使用寿命长。
附图说明
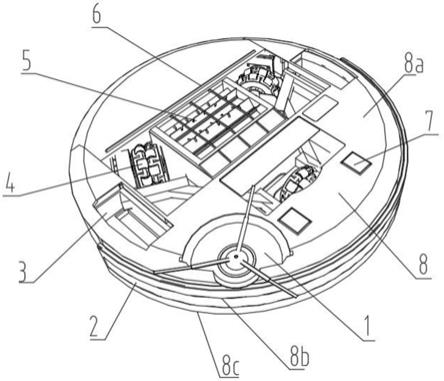
17.图1为本实用新型智能扫地机器人实施例的底部结构示意图;
18.图2为本实用新型智能扫地机器人实施例的扫地刷示意图;
19.图3为本实用新型智能扫地机器人实施例中转向轮机构的结构示意图;
20.说明书附图中的附图标记包括:
21.扫地刷1;碰撞式障碍传感器2;垃圾收集盒3;转向轮机构4;垃圾吸入口5;
22.地板刮6;探测传感器7;机器人壳体8;底板8a;顶壳8b;侧板8c;
23.动力电机101;主动齿轮102;扫地刷头103;清理刮板104;从动齿轮105;从动齿轮固定柱106;扫地刷支架107;
24.连接导杆401;轮子支架402;行走轮403;转向轮404;转向电机405。
具体实施方式
25.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
26.实施例一:
27.如图1-3所示,智能扫地机器人包括机体外壳8、垃圾清扫系统和转向系统,垃圾清扫系统和转向系统安装在机体外壳8内部;垃圾清扫系统包括扫地刷1和探测传感器7,扫地刷1置于扫地机器人底部前端,探测传感器7置于机器人底部,探测传感器7与扫地刷1处于同一水平线上;转向系统包括碰撞式障碍传感器2和转向轮机构4,碰撞式障碍传感器2安装在机体外壳8侧面前端,转向轮机构4安装在机体外壳8内部。智能扫地机器人在进行清扫作业时,通过探测传感器7探测到垃圾,将信号反馈给智能扫地机器人,扫地刷1对垃圾进行清扫。在遇到障碍后,碰撞式障碍式传感器2接受到信号后,转向轮机构4开始带动机器人转
向,进而绕过障碍物。
28.作为优选方案的,垃圾清扫系统还包括垃圾收集盒3和垃圾吸入口5,垃圾吸入口5置于机器人底部,垃圾收集盒3置于机器人底部,该垃圾吸入口5与垃圾收集盒3内部贯通连接,且该垃圾收集盒3设有两个,两个垃圾收集盒3对称分布在垃圾吸入口5两侧。垃圾吸入口5快速将清扫过的垃圾吸入垃圾收集盒3内,提升清洁效率。
29.作为优选方案的,扫地刷1包括动力电机101、主动齿轮102、扫地刷头103、清理刮板104、从动齿轮105和从动轮固定柱106和扫地刷支架107,动力电机101安装在扫地刷支架107上,主动齿轮102与动力电机101同轴连接,且主动齿轮102与从动齿轮105啮合,从动齿轮105与从动轮固定柱106同轴连接,扫地刷头103安装在从动齿轮105上,清理刮板104环形均布安装在扫地刷头103上。动力电机101提供动力,带动主动齿轮102转动,主动齿轮102将力传递给从动齿轮105,与从动齿轮105同轴连接的扫地刷头103快速旋转,扫地刷头103在跟随扫地刷头103的旋转快速清理垃圾。
30.实施例二:
31.如图1-3所示,智能扫地机器人包括机体外壳8、垃圾清扫系统和转向系统,垃圾清扫系统和转向系统安装在机体外壳8内部;垃圾清扫系统包括扫地刷1和探测传感器7,扫地刷1置于扫地机器人底部前端,探测传感器7置于机器人底部,探测传感器7与扫地刷1处于同一水平线上;转向系统包括碰撞式障碍传感器2和转向轮机构4,碰撞式障碍传感器2安装在机体外壳8侧面前端,转向轮机构4安装在机体外壳8内部。智能扫地机器人通过探测传感器7监测到垃圾,扫地刷1对垃圾进行清扫,在遇到障碍后,碰撞式障碍式传感器2接受到信号后,转向轮机构4开始带动机器人转向。
32.作为优选方案的,垃圾清扫系统还包括垃圾收集盒3和垃圾吸入口5,垃圾吸入口5置于机器人底部,垃圾收集盒3置于机器人底部,该垃圾吸入口5与垃圾收集盒3内部贯通连接,且该垃圾收集盒3设有两个,两个垃圾收集盒3对称分布在垃圾吸入口5两侧。垃圾吸入口5快速将清扫过的垃圾吸入垃圾收集盒3内,提升清洁效率。
33.作为优选方案的,扫地刷1包括动力电机101、主动齿轮102、扫地刷头103、清理刮板104、从动齿轮105和从动轮固定柱106和扫地刷支架107,动力电机101安装在扫地刷支架107上,主动齿轮102与动力电机101同轴连接,且主动齿轮102与从动齿轮105啮合,从动齿轮105与从动轮固定柱106同轴连接,扫地刷头103安装在从动齿轮105上,清理刮板104环形均布安装在扫地刷头103上。动力电机101提供动力,带动主动齿轮102转动,主动齿轮102将力传递给从动齿轮105,与从动齿轮105同轴连接的扫地刷头103快速旋转,扫地刷头103在跟随扫地刷头103的旋转快速清理垃圾。
34.作为优选方案的,转向轮机构4包括连接导杆401、轮子支架402、行走轮403、转向轮404和转向电机405,轮子支架402呈三角分布,所述连接导杆401和轮子支架402均设有三个,三根连接导杆401将三个轮子支架402固定连接,转向轮404置于轮子支架402内部,转向电机405安装在轮子支架402外部,且处于轮子支架402与连接导杆401连接形成的三角机构的顶点位置,转向电机405与转向轮404同轴连接,行走轮403置于转向轮404上,行走轮403呈横向环形均布。转向轮机构4既保证了智能扫地机器人向前行走的动作,又提供了转向功能,在行走过程中遇到障碍,智能扫地机器人能够自动调整方向,绕过障碍物。
35.作为优选方案的,机体外壳8为圆柱型构造,该机体外壳8为圆柱型,该机体外壳8
由底板8a、顶壳8b和侧板8c围合形成,所述侧板8c底部与底板8a上方连接,所述顶壳8b与所述侧板8c顶部可拆卸连接。机体外壳8为圆柱型构造,在运动过程中不易产生剧烈碰撞,碰撞受损程度较小,在遇到障碍后,转向更加迅速。
36.作为优选方案的,探测传感器7包括至少一个探测信号发射器和至少一个探测信号接收器,探测信号发射器和探测信号接收器连接,且至少一个探测信号发射器和至少一个探测信号接收器分别设置在机器人底部两侧。探测传感器7能够快速识别垃圾,并反馈给机器人,对垃圾进行快速清扫,提高清扫垃圾的工作效率。
37.实施例二相对于实施例一的优点:
38.对垃圾的清扫更加迅速彻底,在遇到障碍后,不易产生碰撞损伤,并能够自动识别障碍物并进行转向,绕过障碍物。
39.该智能扫地机器人的使用方法为:
40.在智能扫地机器人工作时,通过扫地刷1中的动力电机101提供动力,带动主动齿轮102旋转,继而带动与其相啮合的从动齿轮105旋转,带动扫地刷头103快速转动,清理刮板104快速运转,清理打扫垃圾。垃圾经过打扫后,被吸入垃圾吸入口5,储存在垃圾收集盒3中。探测传感器7在检测到垃圾时,将信号传递给智能扫地机器人,并进行清扫动作。在遇到障碍物时,通过碰撞接触,碰撞式障碍传感器2检测到障碍信号后,转向电机405转动,带动转向轮404旋转,完成机器人转向动作,绕过障碍物。
41.在本实用新型的描述中,需要理解的是,术语“前端”、“后端”、“水平”、“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
42.以上的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。