1.本实用新型属于智能生活装置领域,尤其涉及一种智能扫地机器人系统。
背景技术:
2.目前扫地机器人的发展现状:扫地机器人有很高的商用价值,美国、欧洲、日韩等发达国家和地区已对这一机器人领域投入很多人力与物力开发出了很多性能强大的扫地机器人。而国内相较于欧美等发达国家和地区而言,对清洁机器人器的研究起步较晚,但近些年相关技术得到飞速发展。
3.目前智能垃圾桶的发展现状:相续发明了翻盖型垃圾桶、节能型垃圾桶、感应型垃圾桶。最早的太阳能垃圾桶主要是利用太阳能发电,通过光学元件将太阳能转化为电能,供给给系统驱动,并把多余的电量储存到储蓄电池中以各不时之需。感应型垃圾桶:红外线感应功能能够在人的手或物体接近垃圾桶口约15cm时,垃圾桶自动开盖,等垃圾投入完毕,垃圾桶桶盖又自动关闭。这种智能垃圾桶解决了用手直接接触垃圾桶盖才能扔垃圾的困扰。可是,这一垃圾桶在智能化的道路上只能算提升了一步。但仍存在很大的缺陷,其功能比较单一,扫地机器人与智能垃圾桶没有一体化,单独分开使用,无法达到流水线式清理垃圾,清理垃圾都需要人工操作;比如,扫地机器人内置的垃圾收纳盒需要人为定期取出再将其内部存储的垃圾倾倒至垃圾桶内。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺陷,提供了一种垃圾桶与扫地机器人相结合的智能扫地机器人系统。
5.为实现上述目的,本实用新型所设计的智能扫地机器人系统,包括垃圾桶和扫地机;
6.所述扫地机包括机体和设于机体内的垃圾收纳盒;所述垃圾收纳盒上端设有磁吸片;所述垃圾收纳盒与所述机体活动连接;
7.所述垃圾桶包括外桶、内桶和垃圾提升系统;所述外桶内设有竖直隔板和水平隔板以将所述外桶内腔分隔为扫地机容纳仓、内桶容纳仓和收纳盒提升仓;所述收纳盒提升仓位于所述内桶容纳仓一侧,所述扫地机容纳仓位于所述内桶容纳仓下方,且所述扫地机容纳仓一侧设有开口;
8.所述垃圾提升系统设于所述收纳盒提升仓内,所述垃圾提升系统包括提升链条、提升电机和电磁铁;所述竖直隔板位于竖直设置的所述提升链条上端设有连通所述内桶容纳仓和收纳盒提升仓的垃圾倾倒口;所述提升链条上设有电磁铁,所述电磁铁与所述磁吸片磁吸配合;所述提升电机与所述提升链条上端或下端连接用于驱动所述提升链条转动。
9.进一步,所述电磁铁通过柔性绳与所述提升链条连接。通过柔性绳使电磁铁与提升链条可更好的贴合,使电磁铁处于提升链条上端时可自适应倾斜,使垃圾收纳盒倾倒顺畅。
10.进一步,所述内桶容纳仓位于所述垃圾倾倒口处设有倾斜的导板。导板可将垃圾收纳盒内的垃圾导向至内桶内,避免垃圾掉落至内桶与外桶之间或收纳盒提升仓内。
11.进一步,所述内桶容纳仓内壁设有内桶固定块;所述内桶通过所述内桶固定块与所述外桶连接。
12.进一步,所述扫地机容纳仓背对所述开口一端设有电源模块;所述电源模块与所述垃圾提升系统电连接;所述扫地机容纳仓底部还设有与所述电源模块电连接的扫地机充电件;所述机体下端还设有与所述扫地机充电件接触式电连接的充电导电片。通过扫地机充电件和充电导电片,实现扫地机的自动充电。
13.进一步,所述垃圾收纳盒上端为敞口结构,所述机体上端设有用于覆盖所述敞口结构的收缩挡板。机体内设有用于驱动收缩挡板收缩的驱动件,该驱动件可以是马达与齿条组件的配合,也可以是滑动丝杆组件。
14.进一步,所述内桶固定块上端设有卡槽;所述内桶上端边缘设有用于插入所述卡槽的卡条。
15.进一步,所述内桶上端高度低于所述垃圾倾倒口下端高度。
16.进一步,所述垃圾桶还包括与所述外桶铰接的盖板。
17.本实用新型的有益效果是:通过提升系统可将扫地机的垃圾收纳盒内的垃圾倾倒至垃圾桶内,实现扫地机与智能垃圾桶的一体化,扫地机内的垃圾无需人工干预倾倒,智能化程度高,且扫地机的充电和垃圾倾倒可同步进行,提高了扫地机工作效率。
附图说明
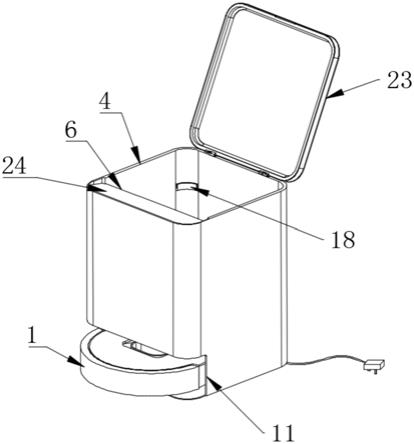
18.图1为本实用新型智能扫地机器人系统的立体结构示意图。
19.图2为图1的俯视结构示意图。
20.图3为图1的主视结构示意图。
21.图4为图3的剖视结构示意图。
22.图5为图4中内桶收纳仓内设有内桶的结构示意图。
23.图6为图5中垃圾收纳盒被提升一定高度后的结构示意图。
24.图7为图6中垃圾收纳盒提升至倾倒垃圾状的结构示意图。
25.图8为图1中扫地机的立体结构示意图。
26.图中,机体1、垃圾收纳盒2、磁吸片3、外桶4、内桶5、竖直隔板6、水平隔板7、扫地机容纳仓8、内桶容纳仓9、收纳盒提升仓10、开口11、提升链条12、提升电机13、电磁铁14、垃圾倾倒口15、柔性绳16、导板17、内桶固定块18、电源模块19、扫地机充电件20、充电导电片21、收缩挡板22、盖板23、封板24。
具体实施方式
27.以下结合附图和具体实施例对本实用新型作进一步的详细描述。
28.如图1至8所示的智能扫地机器人系统,包括垃圾桶和扫地机。
29.扫地机包括机体1和设于机体1内的垃圾收纳盒2;垃圾收纳盒2上端设有磁吸片3;垃圾收纳盒2与机体1活动连接。
30.垃圾桶包括外桶4、内桶5和垃圾提升系统;外桶4内设有竖直隔板6和水平隔板7以
将外桶4内腔分隔为扫地机容纳仓8、内桶容纳仓9和收纳盒提升仓10;收纳盒提升仓10位于内桶容纳仓 9一侧,扫地机容纳仓8位于内桶容纳仓9下方,且扫地机容纳仓 8一侧设有开口11。
31.垃圾提升系统设于收纳盒提升仓10内,垃圾提升系统包括提升链条12、提升电机13和电磁铁14;竖直隔板6位于竖直设置的提升链条12上端设有连通内桶容纳仓9和收纳盒提升仓10的垃圾倾倒口15;提升链条12上设有电磁铁14,电磁铁14与磁吸片3 磁吸配合;提升电机13与提升链条12上端或下端连接用于驱动提升链条12转动。具体为,电磁铁14通过柔性绳16与提升链条12 连接。当然,当电磁铁14尺寸较小时或磁吸片3距离提升链条12 下单距离较近时,也可不适用柔性绳16;本实施例中柔性绳16采用柔性金属丝,其一端与提升链条12连接,另一端与电磁铁14连接,当提升电机13驱动提升链条12转动时,固定于提升链条12 上的柔性绳16及电磁铁14随之升降。当电磁铁14下降至与磁吸片3相吸后,提升电机13反转,从而提升连接上升,带动垃圾收纳盒2上升进入收纳盒提升仓10内,并随着提升电机13的持续转动,垃圾收纳盒2被提升至垃圾倾倒口15后继续被提升时,提升链条12与柔性绳16连接的区域绕过提升链条12上端的转轴开始下降,从而带动垃圾收纳盒2向内桶容纳仓9一侧倾斜,实现垃圾收纳盒2内垃圾的倾倒。当倾倒结束后,提升电机13反转,垃圾收纳盒2下降至机体1内,完成垃圾收纳盒2内垃圾的倾倒动作。为了保证垃圾收纳盒2提升的稳定性,本实施例中垃圾收纳盒2上端间隔设有两个磁吸片3,从而与磁吸片3配合的提升链条12和电磁铁14分别有两个。两个电磁铁14所处高度相同,两个提升链条 12同步转动实现两个电磁铁14的同步升降。
32.为了避免垃圾收纳盒2倾倒时,内部垃圾掉落至收纳盒提升仓 10内,内桶容纳仓9位于垃圾倾倒口15处设有倾斜的导板17,导板17较低的一端位于内桶5上方,为了不影响内桶5取出,导板 17较低的一端与内桶5上端外边缘抵接。
33.内桶容纳仓9内壁设有内桶固定块18;内桶5通过内桶固定块 18与外桶4连接。内桶固定块18上端设有卡槽;内桶5上端边缘设有用于插入卡槽的卡条。内桶5上端高度低于垃圾倾倒口15下端高度。内桶5内可放垃圾袋。从外桶4内取出内桶5时,直接向上抽出内桶5即可,使内桶5上端边缘的卡条从内桶固定块18上端的卡槽分离即可。本实施例中内桶固定块18优选设置在内桶容纳仓9的四角,卡槽为弧形槽。
34.扫地机容纳仓背对开口11一端设有电源模块19;电源模块19 与垃圾提升系统电连接;扫地机容纳仓底部还设有与电源模块19 电连接的扫地机充电件20;机体1下端还设有与扫地机充电件20 接触式电连接的充电导电片21。扫地机移动至扫地机容纳仓内后,其下端的充电导电片21与扫地机充电件20接触,扫地机即可进行充电。而电源模块19包括电池和插头,插头与室内插座连接即可为电源模块19内的电池供电,或直接为扫地机充电件20供电。
35.为了更便于垃圾倾倒,垃圾收纳盒2上端为敞口结构,机体1 上端设有用于覆盖敞口结构的收缩挡板22。当然,垃圾收纳盒2 上端也可铰接盒盖,垃圾收纳盒2倾斜时,盒盖在重力作用下自动打开。本实施例中优选垃圾收纳盒2上端无盒盖。收缩挡板22的驱动件可以是现有技术,本实施例不进行限定,比如,驱动件可以是马达与齿条组件,也可以是滑动丝杆组件。为了收缩挡板22的收缩平稳,机体1内位于收缩挡板22一侧或两相对侧还可设置同一高度的滑槽。
36.垃圾桶还包括与外桶4铰接的盖板23,另外,收纳盒提升仓 10上端还可设置封板24,避免外部灰尘进入收纳盒提升仓10内。
37.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,同样也应视为本实用新型的保护范围。