1.本发明涉及服务类机器人领域,具体地,涉及仓门结构以及机器人。
背景技术:
2.在当今的社会中,随着时代的不断发展科技的不断进步,人们的生活有着质的飞越,逐渐的人们步入了智能化的时代,而机器人就是智能化时代中必不可少的存在,此机器人是能够半自主或全自主工作的智能机器,还具有着感知、决策、执行等基本特征,同时这些机器人可以帮助人类完成一些十分危险、繁重、复杂的工作;
3.而机器人中服务类机器人是其中重要的部分,这些机器人通过自身的移动来帮助人类完成一些基础的送货工作,那些传统的机器人都有着门锁结构,进而在仓门开合时可能出现锁死的现象。
4.专利文献cn207601624u公开了一种用于商场超市智能拣货送货机器人,通过电子锁的设置,而柜门关闭后通过电子锁的自身特性将柜门锁止,当此装置整体断电后电子锁可能失去效用,进而外界可以轻松开启。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供仓门结构以及机器人。
6.根据本发明提供的一种仓门结构,包括门体、主体、电机、主连杆和副连杆,所述主体上设置有门体,且门体具有开合两种状态,所述主体的内部设置有电机,所述电机能够驱动副连杆从第一位置移动至第二位置,所述副连杆的一侧连接有主连杆,当所述副连杆在第一位置时,副连杆的两个端点、所述主连杆两个端点均位于同一直线上,所述门体处于关闭状态,当所述副连杆移动至第二位置处时,所述门体处于开启状态;
7.优选的,所述电机的顶端设置有副连杆;
8.优选地,所述主体与门体之间设置有门轴,所述主体与电机之间设置有光电挡片;
9.优选地,所述副连杆的底端设置有光电挡片;
10.优选地,所述门体在主体上设置有四组,且四组门体在主体的中心线上呈对称分布;
11.优选地,所述主连杆的中间设置有凹槽;
12.优选地,所述光电挡片与副连杆之间呈焊接一体化;
13.优选地,所述主连杆与门体之间呈相互铰接;
14.优选地,所述电机在主体的内部设置有四组;
15.优选地,一种机器人,包括所述的仓门结构,具有移动功能或者不具有移动功能;
16.与现有技术相比,本发明具有如下的有益效果:
17.1、本发明通过电机的自身特性,将主连杆和副连杆的组合带动,进而完成了门体的开启和闭合状态的转换,再利用主连杆和副连杆的四点一线的自锁结构,使此装置出现意外断电后不会因外界的力能将门体开启,保证仓内物品安全不丢失,进而提高了此装置
的功能性;
18.2、本发明通过实现闭门时到达连杆受力的死点,达到闭门后外力无法拉开门,无电时也处于可靠的紧闭状态,进而省去其它闭门锁定结构,节约了此装置的制作成本,提高了此装置的实用性;
19.3、本发明通过实现机器人电机程序控制关闭和打开多仓门同步或单独开启关闭,相教于传统的控制仓门自动开合的方法,此装置运用较少的零件达到了仓门关闭锁止的效果,且体现出结构元件少且轻巧的优点;
附图说明
20.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
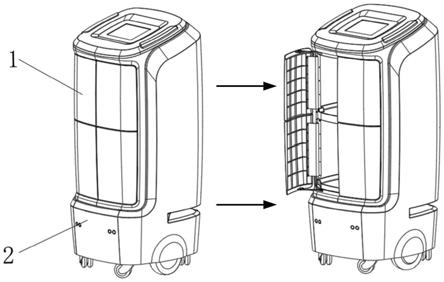
21.图1为本发明的门体开合状态转换立体结构示意图;
22.图2为本发明的门体开合状态转换俯视结构示意图;
23.图3为本发明的图2中a处放大结构示意图;
24.图4为本发明的门体开启状态立体结构示意图;
25.图5为本发明的门体闭合状态立体结构示意图;
26.图中示出:1、门体;2、主体;3、电机;4、主连杆;5、副连杆;6、光电挡片;7、门轴;8、光电传感器。
具体实施方式
27.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
28.请参阅图1-5,本发明提供了:一种仓门结构,包括门体1、主体2、电机3、主连杆4和副连杆5,主体2上设置有门体1,且门体1具有开合两种状态,主体2的内部设置有电机3,电机3能够驱动副连杆5从第一位置移动至第二位置,副连杆5的一侧连接有主连杆4,当副连杆5在第一位置时,副连杆5的两个端点、主连杆4两个端点均位于同一直线上,门体1处于关闭状态,当副连杆5移动至第二位置处时,门体1处于开启状态;
29.门体1在主体2上设置有四组,且四组门体1在主体2的中心线上呈对称分布,主连杆4与门体1之间呈相互铰接,电机3在主体2的内部设置有四组;
30.请参阅图3、图4和图5,电机3的顶端设置有副连杆5,主体2与门体1之间设置有门轴7,主体2与电机3之间设置有光电挡片6,副连杆5的底端设置有光电挡片6;
31.光电挡片6与副连杆5之间呈焊接一体化,四组门体1在主体2上通过门轴7进行翻转运动,再利用光电挡片在主连杆4和副连杆5配合移动时将光电传感器8进行遮挡;
32.请参阅图3、图4和图5,电机3的两侧均设置有光电传感器8;
33.利用电机3的自身特性转动的特性,可将门体进行带动,进而两组光电传感器8的设置,使主体2可以感知门体1的当前状态;
34.本发明的工作原理如下:
35.首先,当主体2移动至合适的位置后,通过电机3自身特性,可带动顶端的副连杆5进行运动,随后副连杆5与主连杆4进行配合,而主连杆4进行运动,同时带动了门体1在门轴7的位置上旋转,同时副连杆5带动光电挡片6将光电传感器8遮挡,通过光电传感器8的自身特性可将光信号转化为电信号,进而明白了门体1的工作状态;
36.其次,通过电机3的反向旋转,可带动副连杆5反向运动,而副连杆5将带动主连杆4移动,随后主连杆4将门体1拉回闭合状态,同时副连杆5在主连杆4的凹槽内放置,进而主连杆4的两点与副连杆5在凹槽内部的点成一直线,当意外发生后电机3停止工作,主连杆4和副连杆5之间的配合使门体1自锁,不可被外部的力能开启。
37.在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
38.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
技术特征:
1.一种仓门结构,其特征在于,包括门体(1)、主体(2)、电机(3)、主连杆(4)和副连杆(5),所述主体(2)上设置有门体(1),且门体(1)具有开合两种状态,所述主体(2)的内部设置有电机(3),所述电机(3)能够驱动副连杆(5)从第一位置移动至第二位置,所述副连杆(5)的一侧连接有主连杆(4);当所述副连杆(5)在第一位置时,副连杆(5)的两个端点、所述主连杆(4)两个端点均位于同一直线上,所述门体(1)处于关闭状态;当所述副连杆(5)移动至第二位置处时,所述门体(1)处于开启状态。2.根据权利要求1所述的仓门结构,其特征在于,所述电机(3)的顶端设置有副连杆(5)。3.根据权利要求1所述的仓门结构,其特征在于,所述主体(2)与门体(1)之间设置有门轴(7),所述主体(2)与电机(3)之间设置有光电挡片(6)。4.根据权利要求1所述的仓门结构,其特征在于,所述副连杆(5)的底端设置有光电挡片(6)。5.根据权利要求1所述的仓门结构,其特征在于,所述门体(1)在主体(2)上设置有四组,且四组门体(1)在主体(2)的中心线上呈对称分布。6.根据权利要求1所述的仓门结构,其特征在于,所述主连杆(4)的中间设置有凹槽。7.根据权利要求3所述的仓门结构,其特征在于,所述光电挡片(6)与副连杆(5)之间呈焊接一体化。8.根据权利要求1所述的仓门结构,其特征在于,所述主连杆(4)与门体(1)之间呈相互铰接。9.根据权利要求1所述的仓门结构,其特征在于,所述电机(3)在主体(2)的内部设置有四组。10.一种机器人,其特征在于,包括权利要求1-9任一项所述的仓门结构,具有移动功能或者不具有移动功能。
技术总结
本发明提供了一种仓门结构以及机器人,包括门体、主体、电机、主连杆和副连杆,所述主体上设置有门体,且门体具有开合两种状态,所述主体的内部设置有电机,所述电机能够驱动副连杆从第一位置移动至第二位置,所述副连杆的一侧连接有主连杆,当所述副连杆在第一位置时,副连杆的两个端点、所述主连杆两个端点均位于同一直线上,所述门体处于关闭状态。本发明通过电机的自身特性,将主连杆和副连杆的组合带动,进而完成了门体的开启和闭合状态的转换,再利用主连杆和副连杆的四点一线的自锁结构,使此装置出现意外断电后不会因外界的力能将门体开启,保证仓内物品安全不丢失,进而提高了此装置的功能性。了此装置的功能性。了此装置的功能性。
技术研发人员:沈林 郭震
受保护的技术使用者:上海景吾酷租科技发展有限公司
技术研发日:2021.12.22
技术公布日:2022/2/15