1.本实用新型属于混凝土预制构件领域,特别涉及一种网片周转系统。
背景技术:
2.现有技术中,在制备混凝土预制构件时,先将边模和模台清洗干净,再将清洗干净后的若干边模依序放置到模台上,若干边模形成加工叠合板的空间,模台流转至网片安装工位,工作人员将钢筋网片放置到空间内,模台再流转至桁架安装工位,依次将若干桁架钢筋放置到空间内,模台再流转至布料工位,布料机将混凝土布入空间内,振捣机对布完混凝土的模台进行振捣,以使空间内的混凝土更加平整,振捣结束的模台流转至养护工位进行养护。工作人员将钢筋网片放置到模台上若干边模围成的空间,其不足之处在于:钢筋网片的安装过程需要依靠人力完成,劳动强度大,效率低,人工安装网片也无法适用于采用机械化设备自动生产叠合板的生产线。
技术实现要素:
3.本实用新型的目的是提供一种网片周转系统,能够实现自动将网片送到需要安装的位置上,用于自动生产混凝土构件的生产线上可以实现快速安装网片,提高网片安装效率,并提高混凝土构件的生产线的产能和加工效率。
4.本实用新型的目的是这样实现的:一种网片周转系统,包括用于存放多个网片的网片存放库,与网片存放库的一侧相对应设置有网片来料线,网片来料线将制造好的网片送到入库抓取位置,与网片存放库和网片来料线相对应设置有堆垛机器人,堆垛机器人将入库抓取位置处的网片放入网片存放库,与网片存放库的另一侧相对应设置有网片出料线,堆垛机器人抓取网片存放库上的网片送到网片出料线上,网片出料线将网片送到上料抓取位置,与网片出料线相对应设置有上料机械手,上料机械手抓取上料抓取位置的网片并送到需要安装网片的位置。
5.本实用新型工作时,网片生产装置将制造出的网片依次逐个放置在网片来料线的进料端,网片来料线将网片输送到出料端即入库抓取位置,堆垛机器人从网片来料线入库抓取位置抓取网片,再将其放入网片存放库,网片存放库可存放网片一百多个,网片出库时,堆垛机器人在网片存放库里抓取网片,将其移动送至网片出料线的进料端,网片出料线将网片输送到出料端即上料抓取位置,上料机械手抓取上料抓取位置的网片并送到需要安装网片的位置,完成网片的自动上料安装,上料机械手的各安装板移动到上料导轨末端,网片安装工位对应设置在各安装板下方。与现有技术相比,本实用新型的有益效果在于:网片存放库可以存放网片一百多个,保证了自动生产混凝土构件的生产线的网片安装工位拥有足够数量的供给网片,能够实现自动将网片送到需要安装的位置上,用于自动生产混凝土构件的生产线上可以实现快速安装网片,提高网片安装效率,并提高混凝土构件的生产线的产能和加工效率。
6.作为本实用新型的进一步改进, 所述网片来料线和网片出料线均包括两个相互
平行设置的外侧支架,外侧支架上沿长度方向设置有外导轨,两个外侧支架上方对应设置有可沿外导轨方向来回移动的上移动车,上移动车下侧设置有两组分别与两根外导轨相活动连接的滑块组件,两个所述外侧支架之间设置有两个相互平行的内侧支架,内侧支架与外侧支架相平行,内侧支架的高度小于外侧支架的高度,内侧支架上沿长度方向设置有内导轨,两个内侧支架上方对应设置有可沿内导轨方向来回移动的下移动车,下移动车下侧设置有两组分别与两根内导轨相活动连接的滑块组件,下移动车在竖直高度方向与上移动车相错开设置。设置上移动车、下移动车可以提高网片的运输效率,两个移动车移动时互不影响,滑块组件包括至少两个前后间隔分布的滑块。
7.作为本实用新型的进一步改进,所述上移动车和下移动车均包括矩形移动框架,移动框架上依次排列设置有若干u形支撑架,上移动车的左边侧、右边侧的支撑架高度大于中间的各支撑架的高度,上移动车的中间的各支撑架上放置有网片,下移动车位于两个外侧支架之间,下移动车的各支撑架上放置有网片。上移动车的左边侧、右边侧的支撑架对网片限位,两个外侧支架对下移动车上的网片限位,滑块组件通过纵向设置的底板安装在对应移动框架的下侧。
8.作为本实用新型的进一步改进,所述网片存放库包括两排相互平行的网片货架,堆垛机器人对应设置在两排网片货架之间,每排网片货架均包括若干依次排列设置的单元货架,相邻的两个单元货架紧靠设置,各单元货架的排列方向与网片来料线输送方向垂直,所述单元货架包括正方体外框架,外框架朝内一侧设置有三个相互间隔的立式支架,每个立式支架上均从上到下依次排列设置有若干摆放层支架,各摆放层支架均伸入外框架内部,各摆放层支架均与外框架相固定,三个立式支架上位于同一水平面内的各摆放层支架上摆放有一个网片,任意相邻的两个摆放层支架之间均留有可容堆垛机器人的抓取手臂伸入的间隙;两排网片货架的左右相对的两个单元货架顶部之间均通过加固件相固定。每排网片货架包括至少六个单元货架,单元货架上设有至少十层摆放层支架,网片存放库可至少存放120个网片,堆垛机器人的两个抓取手臂分别从相应两个摆放层支架之间进入单元货架,抓取网片方便。
9.作为本实用新型的进一步改进,所述堆垛机器人包括移动导轨,移动导轨与各单元货架的排列方向相平行,移动导轨上活动连接有移动底座,移动底座上竖直设置有立柱,立柱上活动连接有升降套,升降套套装在立柱外周,升降套上连接有抓取机构,所述抓取机构包括与升降套相固定的外壳体,外壳体中部开设有凹槽,凹槽底壁中间纵向设置有固定齿条,固定齿条上方对应设置有可纵向移动的下移动板,下移动板中部可转动地设置有移动齿轮,下移动板上贯穿开设有可容移动齿轮穿过的安装槽,移动齿轮下侧与固定齿条相啮合,下移动板的左右两侧均设置有截面为工字形的导向件, 凹槽内位于下移动板的左右两侧均设置侧支座,侧支座上沿纵向依次排列设置有若干可转动的外导向轮,两排外导向轮分别对应两个导向件的外导向槽设置,下移动板上方对应设置有上移动板,上移动板的下侧中部纵向设置有与移动齿轮上侧相啮合的移动齿条,上移动板的下侧设置有两个相互平行的导向条,导向条上沿纵向依次排列设置有若干可转动的内导向轮,两排内导向轮分别与对应导向件的内导向槽相匹配设置,下移动板上纵向设置有驱动齿条,外壳体上对应驱动齿条可转动地设置有驱动齿轮,所述上移动板的前后两侧均设置有两根相互平行的抓取手臂。移动底座在移动导轨上来回移动,升降套上下升降,外壳体上驱动齿轮转动带动驱
动齿条前后移动,下移动板实现前后移动,外导向轮起到限位导向作用,固定齿条不动,下移动板上的移动齿轮转动,移动齿轮带动移动齿条转动,上移动板实现前后移动,内导向轮起到限位导向作用,通过驱动齿轮的正反转实现带动上移动板、下移动板前后伸缩移动,堆垛机器人可以在xyz三轴自由移动,实现分别抓取、送入左右两排网片货架上的网片。
10.作为本实用新型的进一步改进,所述驱动齿轮的齿轮轴竖直伸入外壳体内部,驱动齿轮的齿轮轴下端通过皮带轮机构与连接在电机上的减速器相传动连接;立柱的上下两端分别可转动地设置有一个升降齿轮,下端的升降齿轮的齿轮轴与连接在电机上的减速器相传动连接,两个升降齿轮之间通过升降链条相传动连接,升降链条上设置有与升降套相固定的驱动连接件,外壳体上开设有可容升降链条穿过的贯穿槽或者升降链条与外壳体相错开设置;移动底座的一端可转动地设置有主动轮,主动轮的轮轴与连接在电机上的减速器相传动连接,移动底座的另一端可转动地设置有从动轮,主动轮和从动轮均支撑在移动导轨上,移动底座的下侧沿长度方向依次排列设置有至少两组导向组件,每组导向组件包括两个分别位于移动导轨左右两侧的定位导向轮。皮带轮机构带动驱动齿轮转动;两个升降齿轮带动升降链条传动,升降链条带动升降套升降;移动底座的主动轮带动从动轮、定位导向轮沿移动导轨移动。
11.作为本实用新型的进一步改进,所述上料机械手包括两个相互平行的支撑架,两个支撑架的间距大于网片出料线的宽度,支撑架顶部的纵梁上沿长度方向设置有上料导轨,两根纵梁之间设置有上料座,上料座下表面的左右两侧均设置有至少两个移动座,至少两个移动座与对应上料导轨相活动连接,上料座上沿横向依次排列设置有若干气缸,每个气缸的活塞杆伸出端均向下穿过上料座并连接有安装板,安装板下侧设置有若干电磁吸盘,每个安装板上均设置有至少四根导向杆,上料座上开设有多个可容各导向杆穿过的导向孔,各安装板上的电磁吸盘与网片相对应设置。上料座沿着上料导轨移动,气缸驱动各安装板下降,通过电磁吸盘将网片出料线的网片吸附固定住,再将网片向前送到网片安装工位上。
12.为了更平稳地对移动座导向,所述支撑架顶部的纵梁的上侧和内侧均设置有一根上料导轨,移动座呈l形,每个移动座上均对应两根上料导轨设置有两组滑块组件,支撑架顶部的纵梁内侧沿长度方向设置有上料齿条,移动座上对应上料齿条设置有电机,电机输出端设有与上料齿条相啮合的齿轮。电机带动齿轮沿着上料齿条移动,移动座实现纵向来回移动。
附图说明
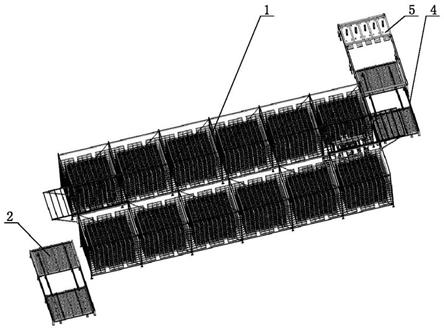
13.图1为本实用新型的立体结构图。
14.图2为本实用新型的立体结构图。
15.图3为网片来料线的结构示意图。
16.图4为两个平行的的单元货架的结构示意图。
17.图5为单元货架的结构示意图。
18.图6为网片出料线、上料机械手的结构示意图。
19.图7为上料机械手的局部放大图。
20.图8为支撑架和移动座的局部放大图。
21.图9为支撑架纵梁上的上料导轨、上料齿条的局部放大图。
22.图10为各安装板的结构示意图。
23.图11为堆垛机器人的结构示意图。
24.图12为图11中a处的放大图。
25.图13为移动导轨、移动底座的底部结构示意图。
26.图14为移动底座的底部结构示意图。
27.图15为抓取机构的结构示意图。
28.图16为抓取机构除去上移动板的结构示意图。
29.图17为抓取机构的传动关系结构示意图。
30.图18为上移动板、抓取手臂的结构示意图。
31.其中,1网片存放库,1a网片货架,1a1单元货架,2网片来料线,3堆垛机器人,4网片出料线,5上料机械手,6外侧支架,7外导轨,8上移动车,9内侧支架,10内导轨,11下移动车,12移动框架,13支撑架,14网片,15外框架,16立式支架,17摆放层支架,18加固件,19移动导轨,20移动底座,21立柱,22升降套,23外壳体,24固定齿条,25下移动板,26移动齿轮,27导向件, 27a外导向槽,27b内导向槽,28侧支座,29外导向轮,30上移动板,31移动齿条,32导向条,33内导向轮,34驱动齿条,35驱动齿轮,36抓取手臂,37皮带轮机构,38电机,39减速器,40升降齿轮,41升降链条,42驱动连接件,43主动轮,44从动轮,45定位导向轮,46支撑架,46a纵梁,47上料导轨,48上料座,49移动座,50气缸,51安装板,52导向杆,53上料齿条。
具体实施方式
32.如图1-18所示,为一种网片周转系统,包括用于存放多个网片14的网片存放库1,与网片存放库1的一侧相对应设置有网片来料线2,网片来料线2将制造好的网片14送到入库抓取位置,与网片存放库1和网片来料线2相对应设置有堆垛机器人3,堆垛机器人3将入库抓取位置处的网片14放入网片存放库1,与网片存放库1的另一侧相对应设置有网片出料线4,堆垛机器人3抓取网片存放库1上的网片14送到网片出料线4上,网片出料线4将网片14送到上料抓取位置,与网片出料线4相对应设置有上料机械手5,上料机械手5抓取上料抓取位置的网片14并送到需要安装网片的位置。
33.为了提高网片的运输效率,网片来料线2和网片出料线4均包括两个相互平行设置的外侧支架6,外侧支架6上沿长度方向设置有外导轨7,两个外侧支架6上方对应设置有可沿外导轨7方向来回移动的上移动车8,上移动车8下侧设置有两组分别与两根外导轨7相活动连接的滑块组件,两个外侧支架6之间设置有两个相互平行的内侧支架9,内侧支架9与外侧支架6相平行,内侧支架9的高度小于外侧支架6的高度,内侧支架9上沿长度方向设置有内导轨10,两个内侧支架9上方对应设置有可沿内导轨10方向来回移动的下移动车11,下移动车11下侧设置有两组分别与两根内导轨10相活动连接的滑块组件,下移动车11在竖直高度方向与上移动车8相错开设置。设置上移动车8、下移动车11可以提高网片的运输效率,两个移动车移动时互不影响,滑块组件包括至少两个前后间隔分布的滑块。为了对网片14限位,上移动车8和下移动车11均包括矩形移动框架12,移动框架12上依次排列设置有若干u形支撑架13,上移动车8的左边侧、右边侧的支撑架13高度大于中间的各支撑架13的高度,上移动车8的中间的各支撑架13上放置有网片14,下移动车11位于两个外侧支架6之间,下
移动车11的各支撑架13上放置有网片14。上移动车8的左边侧、右边侧的支撑架13对网片限位,两个外侧支架6对下移动车11上的网片限位,滑块组件通过纵向设置的底板安装在对应移动框架12的下侧。
34.网片存放库1包括两排相互平行的网片货架1a,堆垛机器人3对应设置在两排网片货架1a之间,每排网片货架1a均包括若干依次排列设置的单元货架1a1,相邻的两个单元货架1a1紧靠设置,各单元货架1a1的排列方向与网片来料线2输送方向垂直,单元货架1a1包括正方体外框架15,外框架15朝内一侧设置有三个相互间隔的立式支架16,每个立式支架16上均从上到下依次排列设置有若干摆放层支架17,各摆放层支架17均伸入外框架15内部,各摆放层支架17均与外框架15相固定,三个立式支架16上位于同一水平面内的各摆放层支架17上摆放有一个网片14,任意相邻的两个摆放层支架17之间均留有可容堆垛机器人3的抓取手臂36伸入的间隙;两排网片货架1a的左右相对的两个单元货架1a1顶部之间均通过加固件18相固定。每排网片货架1a包括至少六个单元货架1a1,单元货架1a1上设有至少十层摆放层支架17,网片存放库1可至少存放120个网片,堆垛机器人3的两个抓取手臂36分别从相应两个摆放层支架17之间进入单元货架1a1,抓取网片方便。
35.堆垛机器人3包括移动导轨19,移动导轨19与各单元货架1a1的排列方向相平行,移动导轨19上活动连接有移动底座20,移动底座20上竖直设置有立柱21,立柱21上活动连接有升降套22,升降套22套装在立柱21外周,升降套22上连接有抓取机构,所述抓取机构包括与升降套22相固定的外壳体23,外壳体23中部开设有凹槽,凹槽底壁中间纵向设置有固定齿条24,固定齿条24上方对应设置有可纵向移动的下移动板25,下移动板25中部可转动地设置有移动齿轮26,下移动板25上贯穿开设有可容移动齿轮26穿过的安装槽,移动齿轮26下侧与固定齿条24相啮合,下移动板25的左右两侧均设置有截面为工字形的导向件27, 凹槽内位于下移动板25的左右两侧均设置侧支座28,侧支座28上沿纵向依次排列设置有若干可转动的外导向轮29,两排外导向轮29分别对应两个导向件27的外导向槽27a设置,下移动板25上方对应设置有上移动板30,上移动板30的下侧中部纵向设置有与移动齿轮26上侧相啮合的移动齿条31,上移动板30的下侧设置有两个相互平行的导向条32,导向条32上沿纵向依次排列设置有若干可转动的内导向轮33,两排内导向轮33分别与对应导向件27的内导向槽27b相匹配设置,下移动板25上纵向设置有驱动齿条34,外壳体23上对应驱动齿条34可转动地设置有驱动齿轮35,上移动板30的前后两侧均设置有两根相互平行的抓取手臂36。移动底座20在移动导轨19上来回移动,升降套22上下升降,外壳体23上驱动齿轮35转动带动驱动齿条34前后移动,下移动板25实现前后移动,外导向轮29起到限位导向作用,固定齿条24不动,下移动板25上的移动齿轮26转动,移动齿轮26带动移动齿条31转动,上移动板30实现前后移动,内导向轮33起到限位导向作用,通过驱动齿轮35的正反转实现带动上移动板30、下移动板25前后伸缩移动,堆垛机器人3可以在xyz三轴自由移动,实现分别抓取、送入左右两排网片货架1a上的网片。驱动齿轮35的齿轮轴竖直伸入外壳体23内部,驱动齿轮35的齿轮轴下端通过皮带轮机构37与连接在电机38上的减速器39相传动连接;立柱21的上下两端分别可转动地设置有一个升降齿轮40,下端的升降齿轮40的齿轮轴与连接在电机38上的减速器39相传动连接,两个升降齿轮40之间通过升降链条41相传动连接,升降链条41上设置有与升降套22相固定的驱动连接件42,外壳体23上开设有可容升降链条41穿过的贯穿槽或者升降链条41与外壳体23相错开设置;移动底座20的一端可转动地设置有主动轮
43,主动轮43的轮轴与连接在电机38上的减速器39相传动连接,移动底座20的另一端可转动地设置有从动轮44,主动轮43和从动轮44均支撑在移动导轨19上,移动底座20的下侧沿长度方向依次排列设置有至少两组导向组件,每组导向组件包括两个分别位于移动导轨19左右两侧的定位导向轮45。皮带轮机构37带动驱动齿轮35转动;两个升降齿轮40带动升降链条41传动,升降链条41带动升降套22升降;移动底座20的主动轮43带动从动轮44、定位导向轮45沿移动导轨19移动。
36.上料机械手5包括两个相互平行的支撑架46,两个支撑架46的间距大于网片出料线4的宽度,支撑架46顶部的纵梁46a上沿长度方向设置有上料导轨47,两根纵梁46a之间设置有上料座48,上料座48下表面的左右两侧均设置有至少两个移动座49,至少两个移动座49与对应上料导轨47相活动连接,上料座48上沿横向依次排列设置有若干气缸50,每个气缸50的活塞杆伸出端均向下穿过上料座48并连接有安装板51,安装板51下侧设置有若干电磁吸盘,每个安装板51上均设置有至少四根导向杆52,上料座48上开设有多个可容各导向杆52穿过的导向孔,各安装板51上的电磁吸盘与网片相对应设置。上料座48沿着上料导轨47移动,气缸50驱动各安装板51下降,通过电磁吸盘将网片出料线4的网片吸附固定住,再将网片向前送到网片安装工位上。为了更平稳地对移动座49导向,支撑架46顶部的纵梁46a的上侧和内侧均设置有一根上料导轨47,移动座49呈l形,每个移动座49上均对应两根上料导轨47设置有两组滑块组件,支撑架46顶部的纵梁46a内侧沿长度方向设置有上料齿条53,移动座49上对应上料齿条53设置有电机38,电机38输出端设有与上料齿条53相啮合的齿轮。电机38带动齿轮沿着上料齿条53移动,移动座49实现纵向来回移动。
37.本实用新型工作时,网片生产装置将制造出的网片依次逐个放置在网片来料线2的进料端,网片来料线2的上移动板30、下移动板25将网片输送到出料端即入库抓取位置,堆垛机器人3从网片来料线2入库抓取位置抓取网片,再将其放入网片存放库1,网片存放库1可存放网片至少120个,网片出库时,堆垛机器人3在网片存放库1里抓取网片,堆垛机器人3的移动底座20在移动导轨19上来回移动,升降套22上下升降,外壳体23上驱动齿轮35转动带动驱动齿条34前后移动,下移动板25实现前后移动,外导向轮29起到限位导向作用,固定齿条24不动,下移动板25上的移动齿轮26转动,移动齿轮26带动移动齿条31转动,上移动板30实现前后移动,内导向轮33起到限位导向作用,通过驱动齿轮35的正反转实现带动上移动板30、下移动板25前后伸缩移动,堆垛机器人3可以在xyz三轴自由移动,实现分别抓取、送入左右两排网片货架1a上的网片;堆垛机器人3将网片移动送至网片出料线4的进料端,网片出料线4的上移动板30、下移动板25将网片输送到出料端即上料抓取位置,上料座48沿着上料导轨47移动,气缸50驱动各安装板51下降,通过电磁吸盘将上料抓取位置的网片吸附固定住,再将网片向前送到网片安装工位上,完成网片的自动上料安装,上料机械手5的各安装板51移动到上料导轨47末端,网片安装工位对应设置在各安装板51下方。本实用新型的优点在于:网片存放库1可以存放网片一百多个,保证了自动生产混凝土构件的生产线的网片安装工位拥有足够数量的供给网片,能够实现自动将网片送到需要安装的位置上,用于自动生产混凝土构件的生产线上可以实现快速安装网片,提高网片安装效率,并提高混凝土构件的生产线的产能和加工效率。
38.本实用新型并不局限于上述实施例,在本实用新型公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特
征作出一些替换和变形,这些替换和变形均在本实用新型的保护范围内。