1.本实用新型涉及一种夹具工装,具体是一种用于数控抛光机的夹具工装。
背景技术:
2.数控抛光机伺服定压抛光,实时补偿耗材损耗;抛光盘由独立电机驱动旋转,正反转自动切换,满足不同工艺需要;数控抛光机主要应用于玻璃、陶瓷等非金属材料的手机2.5d、3d盖板以及铝合金等金属材料后盖的抛光。
3.目前的数控抛光机用夹具大多只能在一个反向上对工件进行夹持,夹持的稳定性较差,或使用三爪自定心卡盘及四爪自定心卡盘对工件进行夹持,虽然稳定性强,但此类卡盘只能对圆柱体或长宽相等的矩形体进行夹持,对长宽不等的长方体及其他形状的工件则无法夹持,有待改进。
技术实现要素:
4.本实用新型的目的在于提供一种用于数控抛光机的夹具工装,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种用于数控抛光机的夹具工装,包括壳体,所述壳体的内壁转动连接有转轴,所述转轴的外壁固定套接有第一蜗轮,所述转轴的外壁转动套接有第二蜗轮,所述壳体上设置有第一夹持机构与第二夹持机构,所述第一夹持机构与转轴传动连接,所述第二夹持机构与第二蜗轮传动连接,所述壳体的内壁转动连接有连个驱动轴,所述驱动轴的外壁均设置有蜗杆,所述第一蜗轮、第二蜗轮分别与对应的蜗杆相互啮合,所述驱动轴的一端贯穿壳体的内壁后固定连接有手轮,所述壳体的外壁均匀固定连接有多个固定耳。
7.作为本实用新型进一步的方案:所述第一夹持机构包括第一转动件,所述第一转动件固定套接在转轴上,所述第一转动件的底部对称转动连接有两个第一连杆,所述第一连杆的端部转动连接有第一活动杆,所述第一活动杆的顶部通过通过第一滑块固定连接有第一夹块。
8.作为本实用新型再进一步的方案:所述第二夹持机构包括第二转动件,所述第二转动件转动套接在转轴上,所述第二转动件与第二蜗轮固定连接,所述第二转动件的顶部对称转动连接有两个第二连杆,所述第二连杆的端部转动连接有第二活动杆,所述第二活动杆的顶部通过第二滑块固定连接有第二夹块。
9.作为本实用新型再进一步的方案:所述第一活动杆、第二活动杆的外壁均滑动套接有导向套,所述导向套与壳体的内壁固定连接。
10.作为本实用新型再进一步的方案:所述壳体的顶部均匀开设有四个滑槽,所述第一滑块、第二滑块位于对应的滑槽内,且第一滑块、第二滑块与滑槽滑动连接。
11.作为本实用新型再进一步的方案:四个所述滑槽呈十字型分布。
12.与现有技术相比,本实用新型的有益效果是:本实用新型在对工件进行夹持时,可
利用两个第一夹块及两个第二夹块由两个相互垂直的方向上对工件进行固定夹持,稳定性强。同时,本实用新型可分别驱动两个第一夹块及两个第二夹块移动,使本夹具能够对长宽不等的长方体及其他形状的工件进行固定夹持,使用范围广。
附图说明
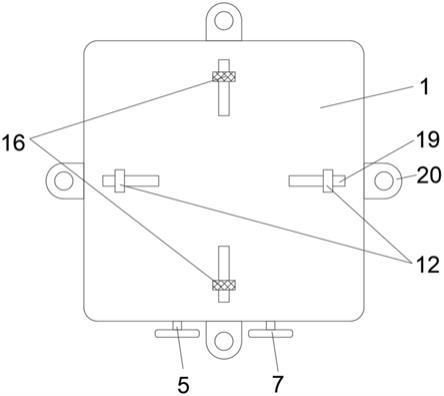
13.图1为用于数控抛光机的夹具工装的结构示意图。
14.图2为用于数控抛光机的夹具工装中手轮的结构示意图。
15.图3为用于数控抛光机的夹具工装中壳体的内部结构示意图。
16.图4为用于数控抛光机的夹具工装中第二夹持机构的结构示意图。
17.图中标记:壳体1、转轴2、第一蜗轮3、第二蜗轮4、驱动轴5、蜗杆6、手轮7、第一转动件8、第一连杆9、第一活动杆10、第一滑块11、第一夹块12、第二转动件13、第二连杆14、第二活动杆15、第二滑块16、第二夹块17、导向套18、滑槽19、固定耳20。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1~4,本实用新型实施例中,一种用于数控抛光机的夹具工装,包括壳体1,所述壳体1的内壁转动连接有转轴2,所述转轴2的外壁固定套接有第一蜗轮3,所述转轴2的外壁转动套接有第二蜗轮4,所述壳体1上设置有第一夹持机构与第二夹持机构,所述第一夹持机构与转轴2传动连接,所述第二夹持机构与第二蜗轮4传动连接,所述壳体1的内壁转动连接有连个驱动轴5,所述驱动轴5的外壁均设置有蜗杆6,所述第一蜗轮3、第二蜗轮4分别与对应的蜗杆6相互啮合,所述驱动轴5的一端贯穿壳体1的内壁后固定连接有手轮7,所述壳体1的外壁均匀固定连接有多个固定耳20。
20.所述第一夹持机构包括第一转动件8,所述第一转动件8固定套接在转轴2上,所述第一转动件8的底部对称转动连接有两个第一连杆9,所述第一连杆9的端部转动连接有第一活动杆10,所述第一活动杆10的顶部通过通过第一滑块11固定连接有第一夹块12。
21.通过手轮7转动对应的蜗杆6,以驱动第一蜗轮3带动转轴2转动,即可带动第一转动件8转动,以利用两个第一连杆9驱动第一活动杆10带动两个第一夹块12同时反向移动。
22.所述第二夹持机构包括第二转动件13,所述第二转动件13转动套接在转轴2上,所述第二转动件13与第二蜗轮4固定连接,所述第二转动件13的顶部对称转动连接有两个第二连杆14,所述第二连杆14的端部转动连接有第二活动杆15,所述第二活动杆15的顶部通过第二滑块16固定连接有第二夹块17。
23.通过手轮7转动对应的蜗杆6,以驱动第二蜗轮4带动第二转动件13转动,以利用两个第二连杆14驱动第二活动杆15带动两个第二夹块17同时反向移动。
24.所述第一活动杆10、第二活动杆15的外壁均滑动套接有导向套18,所述导向套18与壳体1的内壁固定连接。
25.通过导向套18的设置,能够在壳体1内对第一活动杆10及第二活动杆15进行良好
的导向。
26.所述壳体1的顶部均匀开设有四个滑槽19,所述第一滑块11、第二滑块16位于对应的滑槽19内,且第一滑块11、第二滑块16与滑槽19滑动连接,所述第一夹块12、第二夹块17均位于壳体1的上方。
27.四个所述滑槽19呈十字型分布。
28.本实用新型的工作原理是:
29.本实用新型在使用时,通过手轮7转动对应的蜗杆6,以驱动第一蜗轮3带动转轴2转动,即可带动第一转动件8转动,以利用两个第一连杆9驱动第一活动杆10带动两个第一夹块12同时反向移动;
30.通过手轮7转动对应的蜗杆6,以驱动第二蜗轮4带动第二转动件13转动,以利用两个第二连杆14驱动第二活动杆15带动两个第二夹块17同时反向移动;
31.因此,在对工件进行夹持时,可利用两个第一夹块12及两个第二夹块17由两个相互垂直的方向上对工件进行固定夹持,稳定性强。
32.同时,本实用新型中,可分别驱动两个第一夹块12及两个第二夹块17移动,使本夹具能够对长宽不等的长方体及其他形状的工件进行固定夹持,使用范围广。
33.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。