1.本实用新型涉及磨平设备领域,具体为一种混凝土支承块在线连续高速无尘底面磨平机。
背景技术:
2.弹性支承块式无砟轨道中的混凝土支承块在浇注完成后要按设计要求将养护后的混凝土支承块进行底面磨平,在磨平时需要按设计图纸的要求,把凹凸不平的轨枕底面进行磨平处理,使其尺寸和平整度达到设计图纸要求,但是如果不做磨平处理会减少产品本身的使用寿命,降低使用性能,同时也会降低其他部件的使用性能。
3.目前中国专利申请号为201710430866.x的专利,公开了一种混凝土支承块底面磨平机,上述专利中的一种混凝土支承块底面磨平机存在以下不足:
4.上述混凝土支承块底面磨平机是装上加工零件混凝土支承块将底面磨平后,卸下混凝土支承块,再装上第二个混凝土支承块进行加工的单件生产,要进行二次码垛搬运不能连续生产。
5.由于要二次码垛和搬运,混凝土支承块是超重货物,就需要投入更多的人力和物力占用更多的场地和时间。
技术实现要素:
6.(一)解决的技术问题
7.为解决以上问题,本实用新型提供了一种混凝土支承块在线连续高速无尘底面磨平机。
8.(二)技术方案
9.为实现上述目的,本实用新型提供如下技术方案:一种混凝土支承块在线连续高速无尘底面磨平机用于对支承块的底面进行磨平以及运输,该混凝土支承块在线连续高速无尘底面磨平机包括机体、运输机构、磨平机构和翻转机构,运输机构安装在机体上,以运送支承块,磨平机构可活动地安装在机体上,以对支承块底面进行不同厚度地磨平,翻转机构安装在机体上,并置于运输机构的输出端,以接收并翻转支承块。
10.优选地,机体上设有第一板和导向杆,导向杆竖直地安装在机体上,磨平机构包括壳体、磨平件和第一驱动件,壳体安装在机体上,壳体上设有与导向杆滑动连接的第二板,使得壳体可在导向杆上进行滑动,磨平件可转动地安装在壳体内,第一驱动件可活动地安装在第一板上,并与磨平件驱动连接。
11.优选地,第一板上设有导向槽,磨平机构还包括第一固定件和第二固定件,第一固定件安装于导向杆上,用于限制第二板在导向杆上滑动,第一驱动件通过第二固定件与导向槽连接,并安装在第一板上。
12.优选地,壳体上设有相对立设置的进口和出口,磨平件置于进口和出口之间,进口朝向磨平件与支承块接触的一端。
13.优选地,运输机构包括输送台、传动轮、输送链和第二驱动件,输送台安装于机体上,用于运载支承块,传动轮设有多个,多个传动轮分别可转动地安装在机体上,输送链设有两个,两个输送链安装在多个传动轮上,以形成两个闭环链,两个输送链分别置于输送台的两侧,两个输送链之间设有块体,第二驱动件安装于机体上,并与传动轮驱动连接,其中,通过第二驱动件驱使传动轮转动,驱使两个输送链同步运动,使得块体沿输送链运动方向移动并与置于输送台上的支承块接触,进而带动支承块在输送台上移动。
14.优选地,翻转机构包括翻转架和第三驱动件,第三驱动件安装在机体上,且第三驱动件的输出端设有轴杆,轴杆与翻转架固定连接,其中,支承块通过运输机构运送至翻转架内,并在第三驱动件的驱使下,翻转架以及置于翻转架内的支承块一同进行翻转。
15.(三)有益效果
16.与现有技术相比,本技术的有益效果是:该混凝土支承块在线连续高速无尘底面磨平机包括机体、运输机构、磨平机构和翻转机构,运输机构安装在机体上,以运送支承块,磨平机构可活动地安装在机体上,以对支承块底面进行不同厚度地磨平,翻转机构安装在机体上,并置于运输机构的输出端,以接收并翻转支承块,总的来说,该混凝土支承块在线连续高速无尘底面磨平机实现对混凝土支承块进行不同厚度的底面磨平以及确保在磨平工作的连续性,以提高生产线的工作效率。
附图说明
17.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
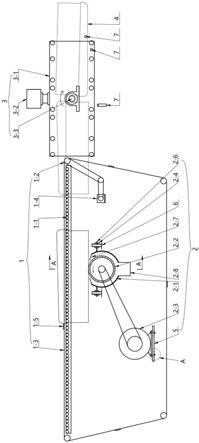
18.图1示出了本实用新型实施例的结构示意图;
19.图2示出了图1中a部的局部放大图;
20.图3示出了图1中a-a部的剖视图;
21.图4示出了图1中翻转机构的结构示意图;
22.图5示出了图1中磨平机构的三种使用状态图。
23.图中:1运输机构、1-1输送台、1-2传动轮、1-3输送链、1-4第二驱动件、1-5块体、2磨平机构、2-1壳体、2-2磨平件、2-3第一驱动件、2-4第一固定件、2-5第二固定件、2-6第二板、2-7进口、2-8出口、3翻转机构、3-1翻转架、3-2第三驱动件、3-3轴杆、4支承块、5第一板、5-1导向槽、6导向杆、7传感器。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.参阅附图1-4,本技术公开一种混凝土支承块在线连续高速无尘底面磨平机用于对支承块4的底面进行磨平以及运输,该混凝土支承块在线连续高速无尘底面磨平机包括机体、运输机构1、磨平机构2和翻转机构3,运输机构1安装在机体上,以运送支承块4,磨平机构2可活动地安装在机体上,以对支承块4底面进行不同厚度地磨平,翻转机构3安装在机
体上,并置于运输机构1的输出端,以接收并翻转支承块4。机体上设有第一板5和导向杆6,导向杆6竖直地安装在机体上,磨平机构2包括壳体2-1、磨平件2-2和第一驱动件2-3,壳体2-1安装在机体上,壳体2-1上设有与导向杆6滑动连接的第二板2-6,使得壳体2-1可在导向杆6上进行滑动,磨平件2-2可转动地安装在壳体2-1内,第一驱动件2-3可活动地安装在第一板5上,并与磨平件2-2驱动连接,第一板5上设有导向槽5-1,磨平机构2还包括第一固定件2-4和第二固定件2-5,第一固定件2-4安装于导向杆6上,用于限制第二板2-6在导向杆6上滑动,第一驱动件2-3通过第二固定件2-5与导向槽5-1连接,并安装在第一板5上。
26.参阅附图1、附图2和附图5,在本实施例中第一驱动件2-3为驱动电机,导向杆6为固定螺栓,第二板2-6为挂板,其上设有可穿于导向杆6的孔位,磨平件2-2为金刚石磨辊,第一固定件2-4为与导向杆6配合紧固的螺母,第二固定件2-5为紧固螺栓螺母,第一驱动件2-3通过带传动与磨平件2-2驱动连接,在进行对支承块4底部面不同厚度磨平时,如下:在进行较小厚度磨平时,将导向杆6上的第一固定件2-4进行调松,使得第二板2-6可沿导向杆6向下移动,此时,磨平件2-2随着第二板2-6下降而下降,而保证第一驱动件2-3与磨平件2-2之间传动的传动带不会发生松弛而导致连接不良的情况,因此,再需要将第一驱动件2-3上的第二固定件2-5调松,并将第一驱动件2-3远离磨平件2-2的方向移动,此时第二固定2-5也随之在导向槽5-1内移动,确定好移动后的位置能够保证第一驱动件2-3与磨平件2-2之间的传动不受到影响,便分别紧固第一固定件2-4和第二固定件2-5,将磨平件2-2和第一驱动件2-3的位置进行固定,以完成对较小厚度磨平的调整,若是要进行较大厚度磨平的调整,则是上述第一驱动件2-3和磨平件2-2所调整的方向相反,其他操作相同,在此不再赘述。
27.进一步的,壳体2-1上设有相对立设置的进口2-7和出口2-8,磨平件2-2置于进口2-7和出口2-8之间,进口2-7朝向磨平件2-2与支承块4接触的一端。
28.具体的,在本实施例中,出口2-8处外接有除尘器(图中未示出),而进口2-7处的两侧均安装有调节板,以调整进口2-7尺寸大小以及进风量,具体实施为,磨平件2-2在对支承块4底部面进行磨平时,会产生灰尘颗粒,因此除尘器在出口2-8进行吸引,将产生的灰尘颗粒从进口2-7引入,并从出口2-8引出至除尘器,以降低灰尘颗粒外扬的情况,实现无尘化作业。
29.进一步的,运输机构1包括输送台1-1、传动轮1-2、输送链1-3和第二驱动件1-4,输送台1-1安装于机体上,用于运载支承块4,传动轮1-2设有多个,多个传动轮1-2分别可转动地安装在机体上,输送链1-3设有两个,两个输送链1-3安装在多个传动轮1-2上,以形成两个闭环链,两个输送链1-3分别置于输送台1-1的两侧,两个输送链1-3之间设有块体1-5,第二驱动件1-4安装于机体上,并与传动轮1-2驱动连接。
30.具体的,通过第二驱动件1-4驱使传动轮1-2转动,驱使两个输送链1-3同步运动,使得块体1-5沿输送链1-3运动方向移动并与置于输送台1-1上的支承块4接触,进而带动支承块4在输送台1-1上移动;
31.在本实施例中输送台1-1的运输结构为两个平行布置的滚道,该滚道由多个轴承形成一排组成的,且两个滚道之间镂空,可从其中观看到磨平机构2,如附图3所示,支承块4的结构形状t型,因此在放置到输送台1-1上时,t型支承块4的底部会嵌入到两个滚道之间的镂空处,t型支承块4的底部面便可与磨平件2-2接触并进行磨平工作,而t型支承块4的两
翼便架于两个滚道上,两个输送链1-3便是分别处于两个滚道的上方,如附图1和附图3所示,输送链1-3围绕着整个磨平机,并与第二驱动件1-4驱动连接,两个输送链1-3之间的块体1-5便可随着输送链1-3的移动而移动,因此块体1-5在移动时接触到支承块4后,带动支承块4在输送台1-1上移动,以进行支承块4底部面的磨平工作以及支承块4的输送工作。
32.进一步的,翻转机构3包括翻转架3-1和第三驱动件3-2,第三驱动件3-2安装在机体上,且第三驱动件3-2的输出端设有轴杆3-3,轴杆3-3与翻转架3-1固定连接。
33.具体的,支承块4通过运输机构1运送至翻转架3-1内,并在第三驱动件3-2的驱使下,翻转架3-1以及置于翻转架3-1内的支承块4一同进行翻转;
34.在本实施例中,翻转架3-1为安装于轴杆3-3上的两个侧板所围合的盒体,其前后两端镂空,并被轴杆3-3分隔为第一区域和第二区域,在初始状态下,翻转架3-1内的第一区域朝向运输机构1,待支承块4从运输机构1进入到第一区域内时,第三驱动件3-2被激活运作,将翻转架3-1进行翻转,从而将支承块4进行180度翻转并运输至下一个设备,此时,第一区域和第二区域的位置相互交替。
35.在本实施例中,翻转机构3上还设有三个传感器7,如附图1和附图4,以下以其一传感器、其二传感器和其三传感器来分别区分上述三个传感器7,其中,其一传感器安装于轴杆3-3下方,并靠近运输机构1的位置上,以检测支承块4是否从运输机构1上完全进入到翻转架3-1内,其二传感器安装于翻转机构3外,并置于远离运输机构1,以检测置于翻转架3-1内的支承块4是否完全输送到下一个设备,其三传感器置于翻转架3-1远离运输机构1的一端上,以检测翻转架3-1是否完成翻转动作,具体实施如下:支承块4从运输机构1进入到翻转架3-1的第一区域内并被其一传感器所检测到时,地三驱动件3-2被激活并驱使翻转架3-1翻转,直至第一区域与第二区域的位置交替,此时其三传感器检测到侧板和其二传感器检测到支承块4,以确认翻转架3-1完成翻转,下一个设备并被激活将支承块4引出,直至其二传感器没有检测到支承块4,便认定支承块4被完全输送到下一个设备内,如此反复上述操作,便可连续对支承块4进行翻转以及输送。
36.需要注意的是,尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。