1.本实用新型涉及铝锭铸造生产线的技术领域,尤其涉及一种用于铝锭连续铸造生产线打渣机器人的渣铲座快换装置,其主要用于快速更换打渣机器人的渣铲座。
背景技术:
2.铝锭铸造是有色冶金行业的主要支柱型产业,在铝锭的铸造的生产工艺中,铝液在浇铸到铸模之后,要对铝液表面的浮渣进行清除处理。大多生产企业是采用人工进行捞渣作业。铝液的温度一般都在七百摄氏度左右,一旦铸模里有水分,则高温铝液如果浇铸就可能产生爆炸,因此,此岗位危险系数高,且劳动强度也大,为此,申请人特意研制了专门用来替代人工捞渣的机器人捞渣设备。该设备在使用过程中,由于机器人使用的渣铲在高温铝液中频繁捞渣,因此,渣铲需要定期更换。而一旦使用过程发生故障造成渣铲损坏,也需要及时快速更换。申请人设计的渣铲座是一个整体的渣铲座,一个渣铲座上安装有四个或者多个渣铲,在更换时,需要整体更换渣铲座总成,而渣铲座由于长期在机器人的带动下高速运动工作,容易松动,因此需要一个能够满足机器人在捞渣过程中,既能够快速更换又能可靠固定的渣铲座快换装置。
技术实现要素:
3.为克服现有技术的缺陷,本实用新型要解决的技术问题是提供了一种用于铝锭连续铸造生产线打渣机器人的渣铲座快换装置,其机构设计简单、合理,能够达到渣铲座的快速拆装,使渣铲座可靠固定,有利于机器人捞渣设备在铝锭铸造生产线中的应用。
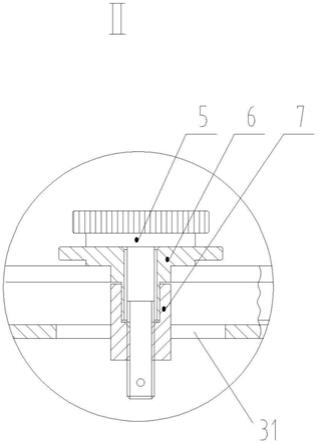
4.本实用新型的技术方案是:这种用于铝锭连续铸造生产线打渣机器人的渣铲座快换装置,其包括:螺栓(1)、渣铲座固定架(2)、渣铲座(3)、渣铲(4)、两个快换单元;快换单元设置在渣铲座固定架(2)的两侧且每个包括:紧固手柄(5)、转向手柄(6)、拉紧卡座(7);
5.安装渣铲座时,渣铲座固定架(2)通过螺栓(1)固定到用于铝锭连续铸造生产线打渣机器人的末端法兰上,再将渣铲座(3)的横梁安装到渣铲座固定架(2)的夹槽内,将转向手柄(6)安装到渣铲座固定架(2)上,再将紧固手柄(5)穿到转向手柄(6)内,之后在渣铲座(3)的横梁底部将拉紧卡座拧到紧固手柄(5)的螺杆上,拧动紧固手柄(5),拉紧卡座(7)在紧固手柄(5)的螺纹拉动下拉紧转向手柄(6),使拉紧卡座(7)的上部和转向手柄(6)的卡槽啮合,通过转向手柄(6)调节拉紧卡座(7)的角度,使得拉紧卡座(7)和渣铲座(3)的横梁垂直,并将渣铲座(3)的横梁卡在拉紧卡座(7)的开口内,此时将紧固手柄(5)拧紧,从而将渣铲座(3)固定在渣铲座固定架(2)上;
6.卸下渣铲座时,松开紧固手柄(5),将转向手柄(6)转动九十度,此时拉紧卡座(7)在转向手柄(6)的驱动下转动九十度,拉紧卡座(7)和渣铲座(3)的横梁上的矩形孔(31)对齐,将渣铲座(3)
7.直接取下。
8.本实用新型通过先后手动逆时针转动渣铲座固定架上的两个紧固手柄,使得拉紧
卡座向下移动,渣铲座会向下松开一定距离,此时,再转动转向手柄,转向手柄会驱动拉紧卡座转动,转动90度,此时,会和渣铲座上开的矩形孔对齐,此时,两个拉紧卡座和渣铲座的矩形孔均对齐时,渣铲座就可以从渣铲座固定架上取下来,达到快速拆下的目的,安装则按照反方向操作,即可完成再次紧固;因此机构设计简单、合理,能够达到渣铲座的快速拆装,使渣铲座可靠固定,有利于机器人捞渣设备在铝锭铸造生产线中的应用。
附图说明
9.图1示出了根据本实用新型的用于铝锭连续铸造生产线打渣机器人的渣铲座快换装置的主视图。
10.图2示出了图1的用于铝锭连续铸造生产线打渣机器人的渣铲座快换装置的左视图。
11.图3示出了图1的ii的局部放大图。
12.图4示出了图2的i的局部放大图。
13.图5示出了图1中的紧固手柄的放大图。
14.图6示出了图1中的转向手柄的放大图。
15.图7示出了图1中的拉紧卡座的放大图。
16.图8示出了图2中的拉紧卡座的放大图。
具体实施方式
17.如图1-8所示,这种用于铝锭连续铸造生产线打渣机器人的渣铲座快换装置,其包括:螺栓1、渣铲座固定架2、渣铲座3、渣铲4、两个快换单元;快换单元设置在渣铲座固定架2的两侧且每个包括:紧固手柄5、转向手柄6、拉紧卡座7;
18.安装渣铲座时,渣铲座固定架2通过螺栓1固定到用于铝锭连续铸造生产线打渣机器人的末端法兰上,再将渣铲座3的横梁安装到渣铲座固定架2的夹槽内,将转向手柄6安装到渣铲座固定架2上,再将紧固手柄5穿到转向手柄6内,之后在渣铲座3的横梁底部将拉紧卡座拧到紧固手柄5的螺杆上,拧动紧固手柄5,拉紧卡座7在紧固手柄5的螺纹拉动下拉紧转向手柄6,使拉紧卡座7的上部和转向手柄6的卡槽啮合,通过转向手柄6调节拉紧卡座7的角度,使得拉紧卡座7和渣铲座3的横梁垂直,并将渣铲座3的横梁卡在拉紧卡座7的开口内,此时将紧固手柄5拧紧,从而将渣铲座3固定在渣铲座固定架2上;
19.卸下渣铲座时,松开紧固手柄5,将转向手柄6转动九十度,此时拉紧卡座7在转向手柄6的驱动下转动九十度,拉紧卡座7和渣铲座3的横梁上的矩形孔31对齐,将渣铲座3直接取下。
20.本实用新型通过先后手动逆时针转动渣铲座固定架上的两个紧固手柄,使得拉紧卡座向下移动,渣铲座会向下松开一定距离,此时,再转动转向手柄,转向手柄会驱动拉紧卡座转动,转动90度,此时,会和渣铲座上开的矩形孔对齐,此时,两个拉紧卡座和渣铲座的矩形孔均对齐时,渣铲座就可以从渣铲座固定架上取下来,达到快速拆下的目的,安装则按照反方向操作,即可完成再次紧固;因此机构设计简单、合理,能够达到渣铲座的快速拆装,使渣铲座可靠固定,有利于机器人捞渣设备在铝锭铸造生产线中的应用。
21.优选地,在所述紧固手柄5的螺杆的下端设置孔,孔内放置开口销8。这样的结构是
为了防止拉紧卡座从紧固手柄的螺杆脱落,通过开口销的弹性性能来接住万一脱落的拉紧卡座。
22.优选地,所述紧固手柄5包括第一圆盘51、第一凸台52、螺杆53;第一凸台在作为手柄使用的第一圆盘下方,第一凸台为圆柱体,第一圆盘的中心立有螺杆。
23.优选地,在所述第一圆盘外周设置防滑花纹。这是为了更好地操作紧固手柄转动。
24.优选地,所述转向手柄6中心具有轴孔63,且包括:第二圆盘61、第二凸台62;第二凸台在作为手柄使用的第二圆盘下方,第二凸台为圆柱体截去上下部分。
25.优选地,在所述第二圆盘外周设置防滑花纹。这是为了更好地操作转向手柄转动。
26.优选地,所述拉紧卡座7具有中心孔73,且包括:长方形底座71、第三凸台72,第三凸台为圆柱体截去中间部分且插入第二凸台。这样设计是为了使拉紧卡座能够随转向手柄同时运动。
27.优选地,所述长方形底座的尺寸小于渣铲座的横梁上的矩形孔31的尺寸。这样长方形底座的长边与横梁上矩形孔的长边平行时才能穿过渣铲座的横梁上的矩形孔,从而使渣铲座整体脱离渣铲座固定架。
28.本实用新型创造巧妙的利用两个手柄和一个拉紧卡座的配合,达到了渣铲座的快速拆装,有利于机器人捞渣设备在工作过程中的应用。
29.本实用新型创造机构设计简单、合理,采用两个紧固手柄和转向手柄以及拉紧卡座的配合,采用两点定位配合渣铲座和渣铲座固定架之间的约束,将渣铲座可靠的固定在渣铲座固定架上,满足了机器人的使用要求。
30.以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本实用新型技术方案的保护范围。