1.本发明涉及研磨技术领域,尤其是涉及一种研磨头承载装置,一种研磨装置和一种研磨站。
背景技术:
2.目前,由于铝材容易进行表面处理生成阳极氧化膜,这层膜硬度高、耐磨、绝缘性好,并可以着色,因此能显著改变和提高铝合金的外观和使用性能。一般铝材出厂后表面总是保持轧制或挤压所特有的表面状态,特别是搬运过程中表面会造成伤痕,又或者铝材在进行机械加工后,表面总是有加工的各种纹路和痕迹,因此对其表面进行打磨消除是最常用的手段。由于铝材和其他金属相比,质软而熔点低,延展性大,因此在进行机械抛光时需要充分进行冷却和润滑。经过机械抛光后,铝合金表面的金相组织与内部的不同,成为非晶态的组织结构,称为变质层(又叫贝尔层),其厚度在2~20nm范围内。
3.常用的研磨抛光方式分为干式和湿式,干式是通过磨料对铝材进行打磨抛光,过程中不添加水,优点是切削力强,研磨效率高。然而由于高速旋转或震动下,磨料和铝材直接的摩擦会产生大量的热量,容易造成铝材烧伤,另外干磨的过程产生大量的铝粉尘,十分危险。湿式打磨是指在过程中添加水,对热量进行散发,同时水分也起到润滑的作用,效果更细腻均匀,并且没有粉尘污染问题。
4.某些铝材工件,由于使用环境的需求,需进行镜面的研磨抛光。镜面研磨抛光一般采用干式布轮抛光,高速旋转的抛光轮与工件摩擦产生高温,使铝材表面发生塑形变形,从而平整了铝材表面的凹凸,同时使在周围大气氧化下瞬间形成的金属表面的极薄氧化膜反复被磨削下来,从而变得逐渐光亮。然而,镜面研磨使用干法自动生产是十分困难的,由于抛光轮的高速运转,使用自动式,力度均匀性很难确保,容易产生表面烧伤。因此,这种研磨方法通常很依赖有经验的研磨师傅,有经验的研磨师傅会根据表面状况,在抛光膏的配合下,选择合适的力度,出光的同时确保不烧伤。这就使得研磨成本较高,效率较低。
技术实现要素:
5.针对以上现有技术中存在的至少一些问题,本发明的目的是提供一种研磨头承载装置,该研磨头承载装置能够在提升研磨效果的同时,提升研磨效率,降低研磨成本。
6.为了实现上述目的,本发明提供一种研磨头承载装置,该研磨头承载装置包括板面相对布置的安装板和承载板以及连接在所述安装板和所述承载板之间的弹性支撑结构,所述弹性支撑结构将所述安装板和所述承载板之间保持设定间距,其中,所述安装板包括用于安装能够提供偏心转动的驱动装置的驱动装置安装部;所述承载板包括用于安装背向所述安装板的研磨头的研磨头安装部,并且所述承载板设置有用于与所述驱动装置的转动轴上的偏心柱配合的偏心结构;其中,所述弹性支撑结构配置为允许所述承载板能够相对于所述安装板摆动。
7.在该技术方案中,由于板面相对布置的安装板和承载板之间连接有弹性支撑结
构,并且承载板上的偏心结构用于与驱动装置的转动轴上的偏心柱配合,而弹性支撑结构配置为允许承载板能够相对于安装板摆动。这样,该研磨头承载装置在实际使用中,安装板将可以连接在连接臂上,可以将驱动装置安装在驱动装置安装部上,此时,驱动装置的转动轴上的偏心柱将与偏心结构配合,而研磨头可以安装在研磨头安装部上并背向安装板。这样,驱动装置启动后转动轴将转动,从而通过配合的偏心柱和偏心结构来带动承载板相对于安装板摆动,同时,研磨头转动。连接臂带动安装板移动,使得研磨头靠近接触研磨表面进行研磨作业,此时,在连接臂传递到安装板靠近研磨表面的作用力下,同时承载板摆动,从而可以使得研磨头在平动的同时,还会产生一定幅度的振动,使得研磨头的轨迹是整体波浪式起伏,并做圆周运动,从而相对于现有技术的同心轨迹增加研磨面积例如可以增加15-20%左右,并有效提升研磨效果,另外,由于采用偏心设计,通过波浪式起伏轨迹,可以有效避免由于工件平整度引起的研磨头损伤,提升研磨头使用寿命。
8.根据本发明的一种实施方式,所述弹性支撑结构连接在所述安装板的外周面和所述承载板的外周面之间。
9.根据本发明的一种实施方式,所述弹性支撑结构包括多个条状弹性件,多个所述条状弹性件沿着周向方向间隔均匀布置。
10.根据本发明的一种实施方式,所述安装板的外周面和所述承载板的外周面分别设置有多个周向间隔均布的连接部,每个所述条状弹性件的一端连接于所述安装板的对应的所述连接部,每个所述条状弹性件的另一端连接于所述承载板的对应的所述连接部。
11.根据本发明的一种实施方式,所述偏心结构位于所述承载板的朝向所述安装板的一侧板面上,所述偏心结构设置为允许所述偏心柱和所述偏心结构在偏心柱轴向方向上相对移动。
12.根据本发明的一种实施方式,所述承载板的中心形成有第一贯通开口和多个围绕所述第一贯通开口周向间隔布置的第二贯通开口,其中,所述偏心结构安装于所述第一贯通开口处。
13.根据本发明的一种实施方式,所述偏心结构包括安装块,所述安装块形成有用于容纳所述偏心柱并允许偏心柱移动的偏心孔,所述安装块设置在所述承载板的朝向所述安装板的一侧板面上。
14.根据本发明的一种实施方式,所述驱动装置安装部位于所述安装板的背向所述承载板的一侧板面上,并且所述安装板形成有用于容纳所述转动轴的贯通孔。
15.根据本发明的一种实施方式,所述驱动装置安装部为所述安装板的背向所述承载板的一侧板面的中心板面区,所述贯通孔形成在所述中心板面区的中部。
16.根据本发明的一种实施方式,所述研磨头安装部包括多个,并且沿着所述承载板的周向方向间隔布置在所述承载板的边缘板区。
17.根据本发明的一种实施方式,所述承载板上形成有位于相邻的所述研磨头安装部之间的第三贯通开口和位于所述研磨头安装部内的第四贯通开口。
18.根据本发明的一种实施方式,所述安装板和所述承载板之间设置有用于防止所述安装板接触所述承载板的止挡结构。
19.根据本发明的一种实施方式,所述止挡结构连接于所述安装板和所述承载板中的一者并与另一者保持距离,其中,所述止挡结构配置为能够调整所述距离。
20.根据本发明的一种实施方式,所述止挡结构包括止挡片体,所述止挡片体的一端能够移动地设置有连接翻边,所述止挡片体的另一端设置有止挡块,所述止挡块包括弹性部。
21.此外,本发明提供一种研磨装置,该研磨装置包括能够提供偏心转动的驱动装置、研磨头和以上任意所述的研磨头承载装置,其中,所述研磨头安装于所述研磨头安装部并背向所述安装板;所述驱动装置安装于所述驱动装置安装部,所述驱动装置的转动轴上的偏心柱与所述偏心结构配合;其中,所述驱动装置提供的偏心转动能够带动所述承载板相对于所述安装板摆动。
22.这样,如上所述的,在实际使用中,安装板可以连接在连接臂上,这样,驱动装置启动后转动轴将转动,从而通过配合的偏心柱和偏心结构来带动承载板相对于安装板摆动,同时,研磨头转动。连接臂带动安装板移动,使得研磨头靠近接触研磨表面进行研磨作业,此时,在连接臂传递到安装板靠近研磨表面的作用力下,同时承载板摆动,从而可以使得研磨头在平动的同时,还会产生一定幅度的振动,使得研磨头的轨迹是整体波浪式起伏,并做圆周运动,从而相对于现有技术的同心轨迹增加研磨面积例如可以增加15-20%左右,并有效提升研磨效果,另外,由于采用偏心设计,通过波浪式起伏轨迹,可以有效避免由于工件平整度引起的研磨头损伤,提升研磨头使用寿命。
23.根据本发明的一种实施方式,所述研磨头包括研磨头本体和至少一个配重块,其中,所述研磨头本体安装于所述研磨头安装部,并且至少一个所述配重块能够拆卸地设置在所述研磨头本体上。
24.根据本发明的一种实施方式,各个所述配重块为环形块,所述环形块形成有缺口,所述研磨头本体包括侧向伸出的管段,所述管段通过所述缺口。
25.根据本发明的一种实施方式,所述研磨装置包括喷淋结构,所述喷淋结构包括喷淋管件和安装座,其中,所述安装座设置在所述安装板背向所述承载板的一侧板面上,所述安装座包括研磨膏供给流道和研磨用水供给流道;所述喷淋管件包括与所述研磨膏供给流道连接的研磨膏供给管路和与所述研磨用水供给流道连接的研磨用水供给管路。
26.根据本发明的一种实施方式,所述研磨装置包括连接臂,所述连接臂的一端和所述安装板连接,所述连接臂的另一端用于与研磨站的机器人手臂连接。
27.最后,本发明提供一种研磨站,该研磨站包括具有机器人手臂的机器人和以上任意所述的研磨装置,其中,所述机器人手臂能够带动所述研磨装置活动。
28.显而易见,在以上单个实施方式中描述的元件或特征可以在其它实施方式中单独或组合使用。
附图说明
29.在附图中,尺寸和比例不代表实际产品的尺寸和比例。附图仅仅是说明性的,并且为了清楚起见,省略了某些非必要的元件或特征。
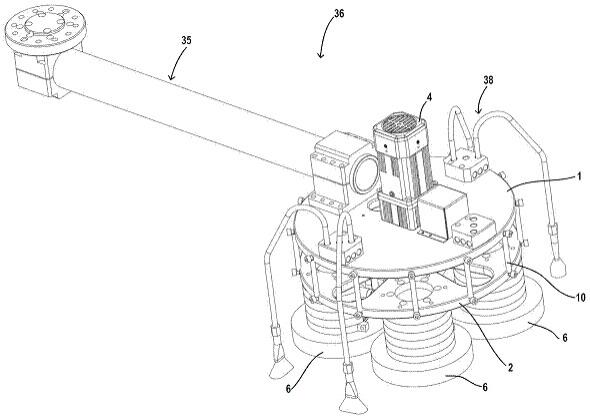
30.图1是示例性地示出了根据本发明的一种实施方式的研磨装置的立体结构示意图。
31.图2是图1的研磨装置的侧视结构示意图。
32.图3是图1的研磨装置中显示的研磨头承载装置的立体结构示意图。
33.图4是图1的研磨装置中显示的研磨头承载装置的一种安装板的立体结构示意图。
34.图5是图1的研磨装置中显示的研磨头承载装置的一种承载板的立体结构示意图。
35.图6是图1的研磨装置中显示的研磨头承载装置的一种止挡结构的立体结构示意图。
36.图7是图6的止挡结构和图4的安装板装配的立体结构示意图。
37.图8是图1的研磨装置中显示的研磨头承载装置的一种偏心结构和驱动装置的偏心柱配合的立体结构示意图。
38.图9是图1的研磨装置中的一种研磨头本体的立体结构示意图。
39.图10是图1的研磨装置中的一种研磨头的立体结构示意图。
40.图11是图1的研磨装置中的一种驱动装置的立体结构示意图。
41.图12是图1的研磨装置中的一种喷淋结构的立体结构示意图。
42.附图标记说明1-安装板,2-承载板,3-弹性支撑结构,4-驱动装置,5-驱动装置安装部,6-研磨头,7-研磨头安装部,8-转动轴,9-偏心柱,10-条状弹性件,11-连接部,12-第一贯通开口,13-第二贯通开口,14-安装块,15-贯通孔,16-中心板面区,17-边缘板区,18-第三贯通开口,19-第四贯通开口,20-止挡结构,21-止挡片体,22-连接翻边,23-止挡块,24-弹性部,25-研磨头承载装置,26-研磨头本体,27-配重块,28-管段,29-喷淋管件,30-安装座,31-研磨膏供给流道,32-研磨用水供给流道,33-研磨膏供给管路,34-研磨用水供给管路,35-连接臂,36-研磨装置,37-缺口,38-喷淋结构。
具体实施方式
43.接下来将参照附图详细描述本发明的弹性模块及弹性垫。这里所描述的仅仅是根据本发明的优选实施方式,本领域技术人员可以在优选实施方式的基础上想到能够实现本发明的其他方式,其他方式同样落入本发明的范围。
44.参考图1、图2、图4和图5,本发明提供的研磨头承载装置25包括板面相对布置的安装板1和承载板2以及连接在安装板1和承载板2之间的弹性支撑结构3,弹性支撑结构3将安装板1和承载板2之间保持设定间距,其中,安装板1包括用于安装能够提供偏心转动的驱动装置4的驱动装置安装部5;承载板2包括用于安装背向安装板1的研磨头6的研磨头安装部7,并且承载板2设置有用于与驱动装置4的转动轴8上的偏心柱9配合的偏心结构;其中,弹性支撑结构3配置为允许承载板2能够相对于安装板1摆动。
45.在该研磨头承载装置25中,由于板面相对布置的安装板1和承载板2之间连接有弹性支撑结构3,并且承载板2上的偏心结构用于与驱动装置4的转动轴8上的偏心柱9配合,而弹性支撑结构3配置为允许承载板2能够相对于安装板1摆动。这样,该研磨头承载装置在实际使用中,安装板1可以连接在连接臂35上,可以将驱动装置4安装在驱动装置安装部5上,此时,驱动装置4的转动轴8上的偏心柱9将与偏心结构配合,而研磨头6可以安装在研磨头安装部7上并背向安装板1。这样,驱动装置4启动后转动轴8将转动,从而通过配合的偏心柱9和偏心结构来带动承载板2通过弹性支撑结构3相对于安装板1摆动,同时,研磨头6转动。此时,连接臂35带动安装板1移动,使得研磨头6靠近接触研磨表面进行研磨作业,此时,在连接臂35传递到安装板1靠近研磨表面的作用力下,同时承载板2摆动,从而可以使得研磨
头在平动的同时,还会产生一定幅度的振动,使得研磨头6的轨迹是整体波浪式起伏,并做圆周运动,从而相对于现有技术的同心轨迹增加研磨面积例如可以增加15-20%左右,并有效提升研磨效果,例如相对于手工研磨的研磨痕≤0.05mm,该研磨头承载装置25的进行多次研磨后的研磨痕≤0.03mm,另外,由于采用偏心设计,通过波浪式起伏轨迹,可以有效避免由于工件平整度引起的研磨头损伤,提升研磨头使用寿命。
46.在该研磨头承载装置中,弹性支撑结构3可以设置在任何位置处,只要能够允许承载板2能够相对于安装板1摆动即可。例如,一种实施方式中,弹性支撑结构3可以设置在安装板1和承载板2相对的板面之间。或者,另一种实施方式中,参考图3所示的,弹性支撑结构3连接在安装板1的外周面和承载板2的外周面之间,这样,可以进一步提升安装板1和承载板2通过弹性支撑结构3连接的可靠性和平稳性,同时,由于弹性支撑结构3位于外周面,也便于拆装弹性支撑结构3。
47.另外,在该研磨头承载装置中,弹性支撑结构3可以包括多种结构类型,例如,弹性支撑结构3的一种结构类型中,弹性支撑结构3可以包括能够扭转的弹性筒,该弹性筒的一端连接于安装板1上例如连接在安装板1的外周面上,该弹性筒的另一端可以连接于承载板2上例如连接在承载板2的外周面上。进一步地,为了便于弹性筒扭转,弹性筒的筒侧壁上可以形成有多个开口,开口的尺寸和形状可以根据实际需求来选择。弹性筒可以为橡胶筒。或者,弹性支撑接头3的另一种结构形式中,参考图3,弹性支撑结构3包括多个条状弹性件10,多个条状弹性件10沿着周向方向间隔均匀布置。这样,多个条状弹性件10周向间隔均布,可以更平稳地连接安装板1和承载板2,同时,也能够允许承载板2能够相对于安装板1摆动。条状弹性件10可以为橡胶条,或者可以为弹簧,例如可以为波浪形弹簧。
48.另外,条状弹性件10的两端可以连接在安装板1和承载板2相互朝向的板面之间。或者,可选择地,条状弹性件10的两端分别连接于安装板1的外周面和承载板2的外周面之间。例如,参考图4和图5,安装板1的外周面和承载板2的外周面分别设置有多个周向间隔均布的连接部11,每个条状弹性件10的一端连接于安装板1的对应的连接部11,每个条状弹性件10的另一端连接于承载板2的对应的连接部11。安装板1上的连接部11和承载板2上的连接部11可以轴向对齐布置以使得条状弹性件10轴向平直延伸,或者可以错开预定间距布置以使得条状弹性件10以预定角度倾斜布置,只要不影响承载板2相对于安装板1摆动即可。
49.另外,连接部11可以具有多种结构形式,例如,一种结构形式中,连接部11可以为从安装板1的外周面和承载板2上伸出的连接柱,条状弹性件10的两端分别挂接在各自端对应的连接柱上。或者,另一种结构形式中,如图4和图5所示的,安装板1的外周面和承载板2的外周面上分别形有多个周向间隔均布的连接孔,每个连接孔中可以配合有连接螺钉,条状弹性件10两端的挂钩可以分别挂接在各自端对应的连接螺钉上。
50.另外,在该研磨头承载装置中,偏心结构可以设置在任何位置处,其只要能够与驱动装置的偏心柱配合,以在转动轴8转动时带动承载板2相对于安装板1偏心运动即可。例如,一种方式中,偏心结构可以设置在承载板2的背向安装板1的一侧板面上,此时,承载板2上可以形成有敞开口,驱动装置的转动轴8穿过该敞开口,使得偏心柱与偏心结构配合。或者,另一种方式中,参考图2,偏心结构位于承载板2的朝向安装板1的一侧板面上,所述偏心结构设置为允许所述偏心柱9和所述偏心结构在偏心柱轴向方向上相对移动。这样,可以使得偏心结构远离研磨头,避免研磨产生的粉尘污染偏心结构而影响偏心结构的可靠性,同
时,由于偏心结构位于承载板2的朝向安装板1的一侧板面上,使得偏心柱9能够以较短的距离与偏心结构更便捷地配合,简化了承载板2和偏心结构之间的配合结构。另外,当连接臂向安装板施加朝向研磨表面的力时,偏心柱9和偏心结构之间将发生相对运动以提供缓冲作用,使得研磨头软性地接触在研磨面上,避免研磨头硬性接触在研磨面上,这可以避免由于研磨头硬性接触研磨面而在局部刮伤研磨表面。这对于铝材的研磨表面很有益处。
51.另外,参考图5,一种实施方式中,承载板2的中心形成有第一贯通开口12和多个围绕第一贯通开口12周向间隔布置的第二贯通开口13,其中,偏心结构安装于第一贯通开口12处。这样,第一贯通开口12和多个第二贯通开口13可以减轻承载板2的重量,同时,也便于观察,以更好地将偏心结构安装于第一贯通开口12处。
52.另外,在该研磨头承载装置中,偏心结构可以具有多种结构形式,例如,偏心结构的一种结构形式中,偏心结构包括形成在承载板2上的偏离中心的偏心通孔,而偏心柱9则可以轴向移动地设置在偏心通孔内,这样,转动轴8带动偏心轴9转圈时,偏心轴9将带动承载板2绕圈摆动。或者,偏心结构的另一种结构形式中,参考图8,偏心结构包括安装块14,安装块14形成有用于容纳偏心柱9并允许偏心柱移动的偏心孔,安装块14设置在承载板2的朝向安装板1的一侧板面上。这样,转动轴8带动偏心轴9转圈时,偏心轴9将作用于偏心孔,并带动承载板2绕圈摆动。
53.安装块14可以安装在承载板2的任何位置处,例如,参考图5,安装块14下方的凸柱可以安装在承载板2的中心的第一贯通开口12中。这样,参考图8,由于安装块14安装在承载板2的中心位置处,这样,转动轴8带动偏心轴9转圈时,偏心轴9将作用于偏心孔,并带动承载板2均匀地绕圈摆动,从而提升研磨的均衡性。
54.另外,驱动装置安装部5可以设置在安装板1的任何位置处,只要能够安装驱动装置4以带动承载板2偏心摆动即可。例如,一种结构中,驱动装置安装部5可以设置在安装板1的朝向承载板的一侧板面上,这样,可以使得驱动装置4位于安装板1和承载板2之间。或者,在另一种结构中,参考图1-图4,驱动装置安装部5位于安装板1的背向承载板2的一侧板面上,并且安装板1形成有用于容纳转动轴8的贯通孔15。这样,驱动装置4可以安装在安装板1的背向承载板2的一侧板面上,使得驱动装置4并不位于安装板1和承载板2之间,这样,可以缩短安装板1和承载板2之间的距离,从而提升该研磨头承载装置的结构紧凑性,并缩短弹性支撑结构3的长度,使得承载板2可以更稳定均衡地摆动。另外,驱动装置4的转动轴8则可以配合在贯通孔15内,使得偏心柱9位于安装板1和承载板2之间。
55.另外,驱动装置安装部5可以位于安装板1的背向承载板2的一侧板面的任何位置处,例如,可以位于边缘位置处。或者,参考图3和图4,驱动装置安装部5为安装板1的背向承载板2的一侧板面的中心板面区16,贯通孔15形成在中心板面区16的中部。这样,可以将驱动装置4安装在安装板1的中心位置处,从而可以与安装在承载板2的中心位置处的偏心结构配合,使得承载板2可以更均衡地整圈摆动,提升研磨均衡性。
56.另外,在该研磨头承载装置中,研磨头安装部7的数量可以为一个,或者,研磨头安装部7包括多个,并且沿着承载板2的周向方向间隔布置在承载板2的边缘板区17。参考图5,这样,多个研磨头6可以周向间隔均匀地设置在边缘板区17的各个研磨头安装部7处,这可以使得承载板2在整圈摆动过程中,一个研磨头可以对另一个研磨头研磨过的区域进行再次研磨,从而可以进一步提升研磨效果。另外,通过波浪式起伏轨迹,可以避免多个例如四
个研磨头高速自传下,由于速度的差异引起的联动损伤。另外,多个研磨头安装部7可以允许按照实际需求来组装不同直径的研磨头,另外,多个研磨头安装部7还可以允许根据实际需求来更换不同尺寸的研磨头,提供进一步提升研磨面积。
57.另外,参考图5,承载板2上形成有位于相邻的研磨头安装部7之间的第三贯通开口18和位于研磨头安装部7内的第四贯通开口19。这样,可以进一步降低承载板2的重量,提升研磨效果。
58.另外,当连接臂带动安装板1抵压研磨表面时,为了防止对承载板2碰撞安装板1,并避免过量压缩弹性支撑结构3,参考图2、图6和图7,安装板1和承载板2之间设置有用于防止安装板1接触承载板2的止挡结构20。这样,该止挡结构20可以限制承载板2和安装板1发生碰撞,并避免损坏弹性支撑结构3。
59.当然,止挡结构20可以同时连接于安装板1和承载板2。或者,参考图2,止挡结构20连接于安装板1和承载板2中的一者并与另一者保持距离,其中,止挡结构20配置为能够调整距离。这样,可以根据实际研磨需求来调整距离,从而可以调整承载板2相对于安装板1的移动距离,以满足不同的研磨需求。
60.另外,止挡结构20可以具有多种结构形式,例如,一种结构形式中,止挡结构20可以为弹性柱。或者,参考图6,止挡结构20包括止挡片体21,止挡片体21的一端能够移动地设置有连接翻边22,止挡片体21的另一端设置有止挡块23,止挡块23包括弹性部24。这样,参考图7,连接翻边22可以连接在安装板1上的连接开口的上侧口边沿上,使得止挡片体21的一部分穿过连接开口,而止挡片体21和连接翻边22之间可以调整位置,从而可以调整弹性部24和承载板2之间的距离。而弹性部24与承载板2接触时可以起到缓冲作用,避免对承载板2形成撞击损伤。
61.此外,本发明提供一种研磨装置,参考图1和图2,该研磨装置包括能够提供偏心转动的驱动装置4、研磨头6和以上任意所述的研磨头承载装置25,其中,研磨头6安装于研磨头安装部7并背向安装板1;驱动装置4安装于驱动装置安装部5,驱动装置4的转动轴8上的偏心柱9与偏心结构配合;其中,驱动装置4提供的偏心转动能够带动承载板2相对于安装板1摆动。
62.这样,如上所述的,在实际使用中,安装板1可以连接在连接臂35上,这样,驱动装置4启动后转动轴8将转动,从而通过配合的偏心柱9和偏心结构来带动承载板2相对于安装板1摆动,同时,研磨头6转动。连接臂35带动安装板1移动,使得研磨头6靠近接触研磨表面进行研磨作业,此时,在连接臂传递到安装板靠近研磨表面的作用力下,同时承载板2摆动,从而可以使得研磨头在平动的同时,还会产生一定幅度的振动,使得研磨头的轨迹是整体波浪式起伏,并做圆周运动,从而相对于现有技术的同心轨迹增加研磨面积例如可以增加15-20%左右,并有效提升研磨效果,另外,由于采用偏心设计,通过波浪式起伏轨迹,可以有效避免由于工件平整度引起的研磨头损伤,提升研磨头使用寿命。
63.另外,驱动装置4可以为采用压缩气体驱动的气动旋转机,或者参考图11,驱动装置4可以采用单向异步电动机,单向异步电动机的转速可调,工作范围为90-1400rpm,额定功率90w,额定转矩0.25nm,减速比10。带动承载板2旋转速率为100rpm。
64.另外,在该研磨装置中,研磨头6的一种实施方式中,参考图9和图10,研磨头6包括研磨头本体26和至少一个配重块27,其中,研磨头本体26安装于研磨头安装部7,并且至少
一个配重块27能够拆卸地设置在研磨头本体26上。这样,连接臂35带动研磨头承载装置25研磨时向下的力矩有两部分,一部分是连接臂施加的,另一部分则是配重块27自身的重力,配重块27自身的重力提供的力度是比较重要的,是研磨力度的主要贡献。另外,配重块27的材质可以是304不锈钢,单个配重块可以为1kg-2kg,从而多个配重块可以根据实际研磨需求来自由组合搭配。例如,单个研磨头的配重5-10kg的配重最为合理,研磨效果最佳,产生的研磨纹较细。因此,当调试研磨效果时,通过增减配重块来增重或者减重是非常重要的手段。这样,根据实际需求来增减配重块,使得配重重量满足研磨需求,在确保研磨效果细腻,研磨纹约细的同时,避免研磨头出现较大损耗,确保研磨头的使用寿命。
65.另外,配重块27可以具有任何形状,并可以通过任何方式设置固定。例如,配重块27可以为方块或圆盘。或者,参考图9和图10,各个配重块27为环形块,环形块形成有缺口37,研磨头本体26包括侧向伸出的管段28,管段28通过缺口37。这样,研磨头本体26可以采用气动式旋转研磨头,而两个管段28则可以分别供气和回气。这样,气动式旋转研磨头可以通过管段28来使用压缩空气驱动,最高旋转可以为12000r/min,底部粘结砂纸、百洁布等研磨耗材,通过高速旋转和向下的力矩,对工件表面进行研磨。
66.另外,参考图12,研磨装置包括喷淋结构38,喷淋结构包括喷淋管件29和安装座30,其中,安装座30设置在安装板1背向承载板2的一侧板面上,安装座30包括研磨膏供给流道31和研磨用水供给流道32;喷淋管件29包括与研磨膏供给流道31连接的研磨膏供给管路33和与研磨用水供给流道32连接的研磨用水供给管路34。这样,研磨时,通过与研磨膏供给流道31连接的研磨膏供给管路33和与研磨用水供给流道32连接的研磨用水供给管路34,可以实现研磨用水(di水)和研磨抛光膏的协同供给,di水用于降温和带走粉尘,研磨抛光膏的主要成分是氧化铝颗粒,使用后研磨会更细腻和增亮。由于di水和研磨抛光膏都是液态,需要和研磨运行时协同供给,又因为研磨时是连续不间断运转,可以设计间隙式气动供料方式,具体可以采用电磁阀控制,2~10s供一次可调,可保证研磨作业正常运行。另外,通过喷淋结构38,可以使得研磨头进行湿式研磨,而采用湿式研磨,在研磨抛光膏的辅助下,可以达到良好的镜面效果。另外,湿式研磨可以对热量进行散发,同时di水也起到润滑的作用,使得研磨效果更细腻均匀。
67.另外,该研磨装置可以作为独立的产品而并不包括连接臂35,而在实际使用中,可以将安装板1连接在连接臂35上。或者,参考图1和图2,该研磨装置可以包括连接臂35,连接臂35的一端和安装板1连接,连接臂35的另一端用于与研磨站的机器人手臂连接。这样,使用时,只需将连接臂35与研磨站的机器人手臂连接即可。当然,连接臂35可以具有多种结构形式,例如,连接臂35可以为伸缩式结构,或者,连接臂35可以包括多节依次连接并能够相对转动到所需角度的臂节。
68.连接臂35的作用是为了进行力矩传动,同时可以大幅增加作业半径,而不用投资大型机械手,从而降低成本。这样,通过连接臂,研磨头承载装置采用偏心的自传方式,当力矩传递到偏心结构时,随着自传运行,不仅会产生平动,还会产生一定幅度的振动,从而加强研磨的效果。
69.最后,本发明提供一种研磨站,该研磨站包括具有机器人手臂的机器人和以上任意所述的研磨装置36,其中,机器人手臂能够带动研磨装置36活动。例如,机器人手臂可以直接和安装板1连接,或者,机器人手臂可以和连接臂35的另一端连接。
70.本发明的保护范围仅由权利要求限定。得益于本发明的教导,本领域技术人员容易认识到可将本发明所公开结构的替代结构作为可行的替代实施方式,并且可将本发明所公开的实施方式进行组合以产生新的实施方式,它们同样落入所附权利要求书的范围内。