1.本实用新型涉及马桶生产设备技术领域,尤其涉及一种于马桶坯体的机器人打磨系统。
背景技术:
2.陶瓷马桶的生产过程中需要对马桶坯体外表面打磨,其目的是让马桶坯体外表面平整一些,以提高产品的外观质量。现在各厂家都是人工手持打磨布打磨马桶的,存在以下问题:1、打磨过程会产生很多粉尘,对工人伤害很大,造成职业病。2、受个人情绪、熟练程度、责任心等因素的影响,打磨出的产品质量很不稳定。
3.现有技术中有使用机器人代替人打磨。具体做法是:建造一输送线,制作一些尺寸统一的工装板,工装板放在输送线上,工人将马桶坯体抱起放在工装板上,输送线将马桶送入机器人打磨房。技术人员操纵机器人,使打磨头处在一个恰当的位置,此位置称为机器人的原点。此时打磨头与马桶之间的距离称为“原点间距”。编写打磨程序,储存程序。释放程序,机器人开始打磨。打磨作业应该建立在“原点距离”不变的基础上。但是马桶上线是由工人手工完成,准确度靠目测,而且受个人情绪、熟练程度、责任心等因素的影响,马桶坯体被放置在工装板上的位置总有偏差,无法统一,与标准位置相比可能偏左、偏右、偏前、偏后,还有角度偏移,即“原点距离”总在改变。虽然打磨头有一定量的伸缩量,允许“原点距离”有偏差,但偏差量不能太大,超出了允许值,机器人打磨马桶的作业就无法很好的完成,要不就是打磨不到,要不就是打磨太多,或将马桶打烂。
技术实现要素:
4.本实用新型所要解决的技术问题在于,提供一种用于马桶坯体的机器人打磨系统,能提高马桶坯体的打磨精度及效率。
5.为解决上述技术问题,本实用新型提供了一种用于马桶坯体的机器人打磨系统,包括运输线、用于运输马桶坯体的工装板、设于所述运输线上的视觉组件、打磨组件以及中央处理器;
6.所述视觉组件包括拍照房、设于所述拍照房内的工业相机、设于所述运输线上的阻挡器及设于所述运输线上的第一对中组件;
7.所述打磨组件包括打磨房,设于所述打磨房内的打磨机器人以及设于所述运输线上的第二对中组件;
8.所述工业相机、打磨机器人均与所述中央处理器连接,所述中央处理器包括数据处理模块及控制模块;所述数据处理模块可通过所述工业相机获取马桶坯体2的位置偏移信息,以使所述控制模块调节所述打磨机器人的初始位姿。
9.作为上述技术方案的改进,所述阻挡器包括气缸及与所述气缸连接的挡板。
10.作为上述技术方案的改进,所述第一对中组件及第二对中组件包括电机、与所述电机连接的齿轮、与所述齿轮啮合的第一齿条及第二齿条,与所述第一齿条可拆卸连接的
第一对中推板,及与所述第二齿条可拆卸连接的第二对中推板。
11.作为上述技术方案的改进,所述工业相机上连接有用于调节所述工业相机垂直位置的升降微调机构。
12.作为上述技术方案的改进,所述升降微调机构包括调节电机、与所述调节电机连接的齿轮及与所述齿轮配合设置的齿条,所述齿条上连接有安装块,所述安装块与所述工业相机连接。
13.作为上述技术方案的改进,所述打磨机器人包括六轴工业机器人及打磨头。
14.作为上述技术方案的改进,所述打磨机器人还包括弹性缓冲机构,所述弹性缓冲机构设于所述六轴工业机器人与打磨头之间。
15.作为上述技术方案的改进,所述弹性缓冲机构包括与所述六轴工业机器人连接的安装座、设于所述安装座内的弹簧以及与所述弹簧连接的弹性座,所述弹性座能相对所述安装座活动,所述弹性座上固定有所述打磨头。
16.实施本实用新型,具有如下有益效果:
17.本实用新型通过视觉组件对马桶坯体拍照,并对比出马桶型号,以及马桶坯体在工装板上x轴及y轴方向上的偏移量,和xoy面上的转角量,从而使机器人调整位姿,从而使打磨机器人能对马桶坯体进行精准打磨,提高打磨效率及打磨精度。
18.进一步地,所述六轴工业机器人与打磨头之间还设有弹性缓冲机构,所述弹性缓冲机构能实现打磨头与马桶坯体的软接触,从而提高打磨的安全性及可靠性。
附图说明
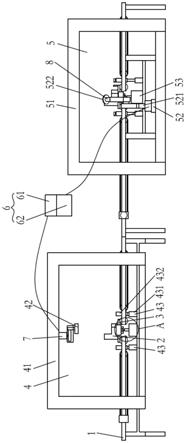
19.图1是本实用新型涉及的打磨系统的整体示意图;
20.图2是图1中a部放大图;
21.图3是本实用新型涉及的升降微调机构的结构示意图;
22.图4是本实用新型涉及的弹性缓冲机构的结构示意图。
具体实施方式
23.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步地详细描述。仅此声明,本实用新型在文中出现或即将出现的上、下、左、右、前、后、内、外等方位用词,仅以本实用新型的附图为基准,其并不是对本实用新型的具体限定。
24.参见图1,本实用新型提供了一种用于马桶坯体的机器人打磨系统,包括运输线1、用于运输马桶坯体2的工装板3、设于所述运输线1上的视觉组件4、打磨组件5以及中央处理器6;
25.所述视觉组件4包括拍照房41、设于所述拍照房41内的工业相机42、设于所述运输线1上的阻挡器43及设于所述运输线1上的第一对中组件44;
26.所述打磨组件5包括打磨房51,设于所述打磨房51内的打磨机器人52以及设于所述运输线1上的第二对中组件53;
27.所述工业相机42、打磨机器人52均与所述中央处理器6连接,所述中央处理器6包括数据处理模块61及控制模块62;所述数据处理模块61可通过所述工业相机42获取马桶坯体2的位置偏移信息,以使所述控制模块62调节所述打磨机器人52的初始位姿。
28.具体地,马桶坯体2放置在工装板3上,经所述运输线1输送。为获取马桶坯体2在工装板3上的具体位置信息以及马桶的型号,所述马桶坯体2被先运输至所述拍照房41内,所述工业相机42对马桶坯体2进行拍照后将数据传输给所述数据处理模块61,经所述数据处理模块61与其储存的马桶型号数据及马桶坐标进行对比,得出马桶的型号,以及马桶坯体2在工装板3上x轴及y轴方向上的偏移量,以及xoy面上的转角量。所述数据处理模块61将上述数据发送给所述控制模块62,所述控制模块驱动所述打磨机器人52根据上述数据改变初始位姿,以使打磨机器人52与马桶坯体2的打磨原点不变,从而能按预定程序对马桶坯体2进行精准打磨。所述第一对中组件44及第二对中组件53能在拍照及打磨时调整工装板3的位置,使其位于运输线1的中心线上,从而提高拍照获取数据的可靠性及打磨的精度。
29.为防止拍照时马桶移动,所述阻挡器43包括气缸431及与所述气缸431连接的挡板432。所述气缸431的自由端顶出后,所述挡板432能挡住所述工装板3。优选地,所述挡板432上设有传感器以感应工装板3的位置,发送信号给控制器控制运输线1的电机停止,从而提高自动化水平。
30.所述第一对中组件44及第二对中组件53能使工装板3与运输线1的中心线对中,所述第一对中组件44及第二对中组件53可以是两个相对设置的气缸。但为提高调节时的同步精度,本实施例中的所述第一对中组件44及第二对中组件53包括电机441、与所述电机441连接的齿轮442、与所述齿轮442啮合的第一齿条443及第二齿条444,与所述第一齿条443可拆卸连接的第一对中推板445,及与所述第二齿条444可拆卸连接的第二对中推板(附图中未显示)。具体地,所述齿轮442转动时,所述第一齿条443及第二齿条444能相对运动或相背运动,带动所述第一对中推板445及第二对中推板同步运动,使工装板3快速对中,对中效率高。
31.所述工业相机42需要完整拍下马桶的全貌,但运输线1上往往有不同规格的马桶。为此,所述工业相机42上连接有用于调节所述工业相机42垂直位置的升降微调机构7,且所述升降微调机构7的调节精度高。
32.在本实施例中,所述升降微调机构7包括调节电机71、与所述调节电机71连接的齿轮72及与所述齿轮72配合设置的齿条73,所述齿条73上连接有安装块74,所述安装块74与所述工业相机42连接。其中,所述调节电机71与拍照房41的顶面连接,所述齿轮72及齿条73能调节所述安装块74的高度,齿轮齿条机构具有较好的调节精度,从而带动所述工业相机42上升或下降预定高度。
33.所述打磨机器人52包括六轴工业机器人521及打磨头522。具体地,采用六轴工业机器人521具有较好的工作轨迹,从而能满足马桶坯体2的曲面打磨需求。所述打磨头522与所述六轴工业机器人521可拆卸连接,便于更换打磨头522。
34.进一步地,所述打磨机器人52还包括弹性缓冲机构8,所述弹性缓冲机构8设于所述六轴工业机器人521与打磨头522之间。所述弹性缓冲机构8能使打磨头522与马桶坯体2弹性接触,避免打磨头522损伤马桶坯体2,以提高打磨机器人52的可靠性。
35.其中,所述弹性缓冲机构8包括与所述六轴机器人连接的安装座81、设于所述安装座81内的弹簧82以及与所述弹簧82连接的弹性座83,所述弹性座83能相对所述安装座81活动,所述弹性座83上固定有所述打磨头522。具体地,所述安装座81与所述六轴工业机器人521的自由端连接,所述弹簧82的一端与所述安装座81固定,其另一端与弹性座83固定,所
述弹性座83能在所述安装座81内伸缩。所述打磨头522与所述弹性座83连接,通过弹簧82实现打磨头522与马桶坯体2的软接触,从而提高打磨的安全性及可靠性。
36.综上,本实用新型提供了一种用于马桶坯体2的机器人打磨系统,通过视觉组件4对马桶坯体2拍照,并对比出马桶型号,以及马桶坯体2在工装板3上x轴及y轴方向上的偏移量,和xoy面上的转角量,从而使机器人调整位姿,从而使打磨机器人52能对马桶坯体2进行精准打磨,提高打磨效率及打磨精度。
37.所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。