1.本发明属于砂芯浸涂辅助夹具的技术领域,尤其涉及一种带快换盘的夹爪固定治具。
背景技术:
2.工程机械行业配套的液压阀、液压泵类产品,在生产铸造过程中常规采用砂芯铸造工艺,一般使用的砂芯(内芯)都需要进行浸涂涂料并烘干涂料后才能使用。在砂芯的浸涂工序,传统的方式为人工拿取砂芯浸涂到涂料中,随后人工将砂芯表面多余涂料甩掉,再放到烘干炉前段的辊道托盘上进行表面涂料的烘干。此生产过程采用人工浸涂、人工甩涂、人工搬运放料的方式,人员劳动强度大且枯燥,生产效率不高。不同的操作人员由于浸涂的时间不同、甩涂的角度力度不同,会造成砂芯的表面涂料均匀度不佳,影响最终产品的质量。浸涂使用的简易涂料池无法将涂料搅拌均匀,造成砂芯表面涂料厚度等不符合工艺要求,影响最终产品的合格率。
3.为了提高此类产品的自动化程度,机器人夹爪采用一拖二的夹爪快换装置,机器人在使用其中一个夹爪的过程中,另一个夹爪放在治具待机,所以在机器手行程抓取范围内安装夹爪治具,方便更换机器手夹爪的操作。
技术实现要素:
4.为达到上述目的,本发明是通过以下技术方案实现的:
5.一种带快换盘的夹爪固定治具,包括有底座,所述底座上间隔设置有两组机器人夹爪板,位于各机器人夹爪板外侧面的底座上均设置有夹紧立柱,位于两机器人夹爪板之间设置有侧向夹持机构,所述侧向夹持机构包括有夹持架,所述夹持架内设置有两相背设置的气缸,各气缸活塞杆自由端均连接有固定压板,各固定压板抵触在对应的机器人夹爪板侧面上。
6.本发明工作时,操作人员通过操作机器人,将机械手主盘与需要更换的机器人夹爪板上的机械手副盘进行连接,通过控制气缸将固定压板从对应的机器人夹爪板上脱离,机器人将机器人夹爪板移动至输送线上将砂芯夹紧,再将机器人夹爪板进行浸涂。
7.与现有技术相比,本发明的有益效果是:该装置采用一拖二的夹爪快换装置,机器人在使用其中一个机器人夹爪板的过程中,另一个机器人夹爪板放在底座上,所以在机器手行程抓取范围内安装机器人夹爪板,方便更换机器手夹爪的操作,该装置适用于工业生产中,具有良好的实用性。
8.各所述固定压板上均连接有导向轴,所述导向轴活动插接在夹持架内。导向轴的设置保证了固定压板在运动的过程中始终处于竖直状态,能够增大固定压板与机器人夹爪板的接触面积,使得机器人夹爪板局部压强较小,防止机器人夹爪板被压变形。
9.朝向对应机器人夹爪板的各夹紧立柱表面上均设置有夹紧板,所述夹紧板抵触在对应的机器人夹爪板侧面上。
10.所述固定压板与夹紧板表面上均设置有尼龙挡块。
11.所述机器人夹爪板包括有方形框架,所述方形框架内设置有若干夹具工位,所述方形框架侧面连接有安装块,所述安装块上连接有机械手副盘,所述方形框架底部设置有牛眼安装孔,各牛眼安装孔正对的底座上设置有牛眼安装座。
12.位于安装块下方的夹紧立柱侧面设置有l型的固定块,所述固定块的竖直段经紧固件与夹紧立柱连接,固定块的水平段经紧固件与安装块的下表面连接。
13.所述安装块下表面上设置有接近开关。
附图说明
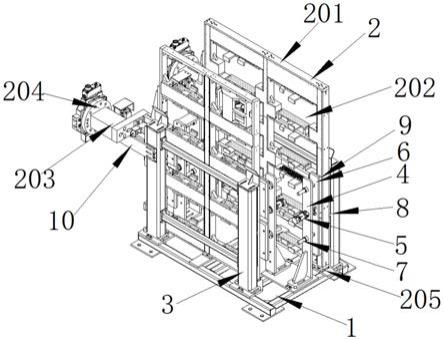
14.图1为本发明的结构示意图。
15.图中:1底座,2机器人夹爪板,201方形框架,202夹具工位,203安装块,
16.204机械手副盘,205牛眼安装座,3夹紧立柱,4夹持架,5气缸,6固定压板,7导向轴,8夹紧板,9尼龙挡块,10固定块。
具体实施方式
17.下面结合附图及实施例对本申请的技术方案作进一步地描述说明。
18.如图1所示,为一种带快换盘的夹爪固定治具,包括有底座1,底座1上间隔设置有两组机器人夹爪板2,位于各机器人夹爪板2外侧面的底座1上均设置有夹紧立柱3,位于两机器人夹爪板2之间设置有侧向夹持机构,侧向夹持机构包括有夹持架4,夹持架4内设置有两相背设置的气缸5,各气缸5活塞杆自由端均连接有固定压板6,各固定压板6抵触在对应的机器人夹爪板2侧面上。各固定压板6上均连接有导向轴7,导向轴7活动插接在夹持架4内。导向轴7的设置保证了固定压板6在运动的过程中始终处于竖直状态,能够增大固定压板6与机器人夹爪板2的接触面积,使得机器人夹爪板2局部压强较小,防止机器人夹爪板2被压变形。朝向对应机器人夹爪板2的各夹紧立柱3表面上均设置有夹紧板8,夹紧板8抵触在对应的机器人夹爪板2侧面上。固定压板6与夹紧板8表面上均设置有尼龙挡块9。机器人夹爪板2包括有方形框架201,方形框架201内设置有若干夹具工位202,方形框架201侧面连接有安装块203,安装块203上连接有机械手副盘204,方形框架201底部设置有牛眼安装孔,各牛眼安装孔正对的底座1上设置有牛眼安装座205。位于安装块203下方的夹紧立柱3侧面设置有l型的固定块10,固定块10的竖直段经紧固件与夹紧立柱3连接,固定块10的水平段经紧固件与安装块203的下表面连接。安装块下表面上设置有接近开关。
19.工作时,操作人员通过操作机器人,将机械手主盘与需要更换的机器人夹爪板2上的机械手副盘进行连接,通过控制气缸5将固定压板6从对应的机器人夹爪板2上脱离,机器人将机器人夹爪板2移动至输送线上将砂芯夹紧,再将机器人夹爪板2进行浸涂。
20.本发明并不局限于上述实施例,在本发明公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本发明的保护范围内。
技术特征:
1.一种带快换盘的夹爪固定治具,其特征在于:包括有底座,所述底座上间隔设置有两组机器人夹爪板,位于各机器人夹爪板外侧面的底座上均设置有夹紧立柱,位于两机器人夹爪板之间设置有侧向夹持机构,所述侧向夹持机构包括有夹持架,所述夹持架内设置有两相背设置的气缸,各气缸活塞杆自由端均连接有固定压板,各固定压板抵触在对应的机器人夹爪板侧面上。2.根据权利要求1所述的一种带快换盘的夹爪固定治具,其特征在于:各所述固定压板上均连接有导向轴,所述导向轴活动插接在夹持架内。3.根据权利要求2所述的一种带快换盘的夹爪固定治具,其特征在于:朝向对应机器人夹爪板的各夹紧立柱表面上均设置有夹紧板,所述夹紧板抵触在对应的机器人夹爪板侧面上。4.根据权利要求3所述的一种带快换盘的夹爪固定治具,其特征在于:所述固定压板与夹紧板表面上均设置有尼龙挡块。5.根据权利要求1-4中任一权利要求所述的一种带快换盘的夹爪固定治具,其特征在于:所述机器人夹爪板包括有方形框架,所述方形框架内设置有若干夹具工位,所述方形框架侧面连接有安装块,所述安装块上连接有机械手副盘,所述方形框架底部设置有牛眼安装孔,各牛眼安装孔正对的底座上设置有牛眼安装座。6.根据权利要求5所述的一种带快换盘的夹爪固定治具,其特征在于:位于安装块下方的夹紧立柱侧面设置有l型的固定块,所述固定块的竖直段经紧固件与夹紧立柱连接,固定块的水平段经紧固件与安装块的下表面连接。7.根据权利要求6所述的一种带快换盘的夹爪固定治具,其特征在于:所述安装块下表面上设置有接近开关。
技术总结
本发明涉及一种带快换盘的夹爪固定治具。该装置包括有底座,所述底座上间隔设置有两组机器人夹爪板,位于各机器人夹爪板外侧面的底座上均设置有夹紧立柱,位于两机器人夹爪板之间设置有侧向夹持机构,所述侧向夹持机构包括有夹持架,所述夹持架内设置有两相背设置的气缸,各气缸活塞杆自由端均连接有固定压板,各固定压板抵触在对应的机器人夹爪板侧面上,该装置采用一拖二的夹爪快换装置,机器人在使用其中一个机器人夹爪板的过程中,另一个机器人夹爪板放在底座上,所以在机器手行程抓取范围内安装机器人夹爪板,方便更换机器手夹爪的操作,该装置适用于工业生产中,具有良好的实用性。性。性。
技术研发人员:郭青春
受保护的技术使用者:苏州红橙蓝机器人有限公司
技术研发日:2021.12.03
技术公布日:2022/2/15